無線射頻技術(shù)和鄰域定位算法的搜索定位系統(tǒng)研究?
2021-08-08 10:57:12翟維
計(jì)算機(jī)與數(shù)字工程 2021年7期
翟 維
(西安航空學(xué)院電子工程學(xué)院 西安710077)
1 引言
隨著物聯(lián)網(wǎng)的不斷發(fā)展,無線射頻識(shí)別技術(shù)(RFID)也在物流貨物追蹤、倉庫物品管理、交通、超市等多個(gè)領(lǐng)域得到了廣泛的應(yīng)用[1]。RFID是一種無接觸檢測(cè)識(shí)別技術(shù),通過射頻信號(hào)的掃描來獲取一定范圍內(nèi)的目標(biāo)信息,整個(gè)掃描過程均可通過電腦控制,具有高效、便捷、適應(yīng)各種惡劣環(huán)境的優(yōu)點(diǎn)[2]。
目前,多種應(yīng)用場(chǎng)景下需要對(duì)目標(biāo)進(jìn)行實(shí)時(shí)定位,由于被定位的物體如車輛、物流郵件等活動(dòng)范圍寬廣,連續(xù)大面積在各地鋪設(shè)標(biāo)簽閱讀器并不現(xiàn)實(shí)[1]。若將閱讀器安置在被測(cè)目標(biāo)上,該閱讀器可識(shí)別所在位置一定范圍內(nèi)的標(biāo)簽條形碼并將信息反饋給上位機(jī),從而可實(shí)現(xiàn)無線射頻識(shí)別的精確定位[3]。閱讀器的質(zhì)量、體積和標(biāo)簽的成本是限制該方法大面積推廣的技術(shù)障礙,要針對(duì)上述問題設(shè)計(jì)成本更低、精度更高的定位算法[4]。
已有研究多基于無線射頻信號(hào)的強(qiáng)度、各類統(tǒng)計(jì)算法和訓(xùn)練樣本等對(duì)被測(cè)物體進(jìn)行定位[5]。但這些方法均存在一定的缺陷,如閱讀器的調(diào)節(jié)功率不足[6];墻壁等障礙物對(duì)信號(hào)傳輸存在干擾,導(dǎo)致定位精度低[7];目前的標(biāo)簽種類大部分為有源標(biāo)簽,成本較高[8]。
針對(duì)上述缺陷,本文擬采用無源標(biāo)簽對(duì)物體進(jìn)行定位,基于多跳鄰域定位的思想對(duì)傳統(tǒng)無線射頻識(shí)別定位算法進(jìn)行優(yōu)化,提出的優(yōu)化算法僅需考慮無線射頻識(shí)別系統(tǒng)的最基礎(chǔ)功能,無需考慮閱讀器和標(biāo)簽之間的信號(hào)傳輸強(qiáng)度,極大地簡化了定位識(shí)別系統(tǒng)的成本,并增加其魯棒性和抗干擾特性[9]。研究結(jié)論可為基于無線射頻識(shí)別技術(shù)的物體定位算法提供一種新的研究思路。
2 基于無線射頻識(shí)別的鄰域定位系統(tǒng)及算法分析
2.1 系統(tǒng)結(jié)構(gòu)
基于無線射頻識(shí)別的鄰域定位系統(tǒng)主要由閱讀器、標(biāo)簽數(shù)據(jù)庫和標(biāo)簽排列方式算法庫組成。在本算法中將閱讀器放置在被測(cè)單元上,閱讀器配備傳輸天線,主要用于將收集到的信號(hào)傳送回上位機(jī)。標(biāo)簽采用無源標(biāo)簽,在上位機(jī)中建立基于無線射頻識(shí)別的標(biāo)簽庫,用于存儲(chǔ)和實(shí)時(shí)更新所有標(biāo)簽的坐標(biāo)和周邊環(huán)境[10]。
本文設(shè)計(jì)了方形網(wǎng)格(Squ)、三角形網(wǎng)格(Tri)和隨機(jī)網(wǎng)格(Rand)三種標(biāo)簽排列方式。三種排列方式下的標(biāo)簽位置算法如下。
1)方形網(wǎng)格(Squ)

2)三角形網(wǎng)格(Tri)
3)隨機(jī)網(wǎng)格(Rand)
規(guī)定單個(gè)閱讀器范圍內(nèi)只要要有一個(gè)標(biāo)簽,因此各個(gè)標(biāo)簽之間的間距要在一定范圍內(nèi)。三種網(wǎng)絡(luò)形式下標(biāo)簽的最大和最小標(biāo)簽之間的距離可表述如下。
1)方形網(wǎng)格(Squ)

2)三角形網(wǎng)格(Tri)
3)隨機(jī)網(wǎng)格(Rand)
三種情況下的標(biāo)簽排列方式示意圖見圖1。
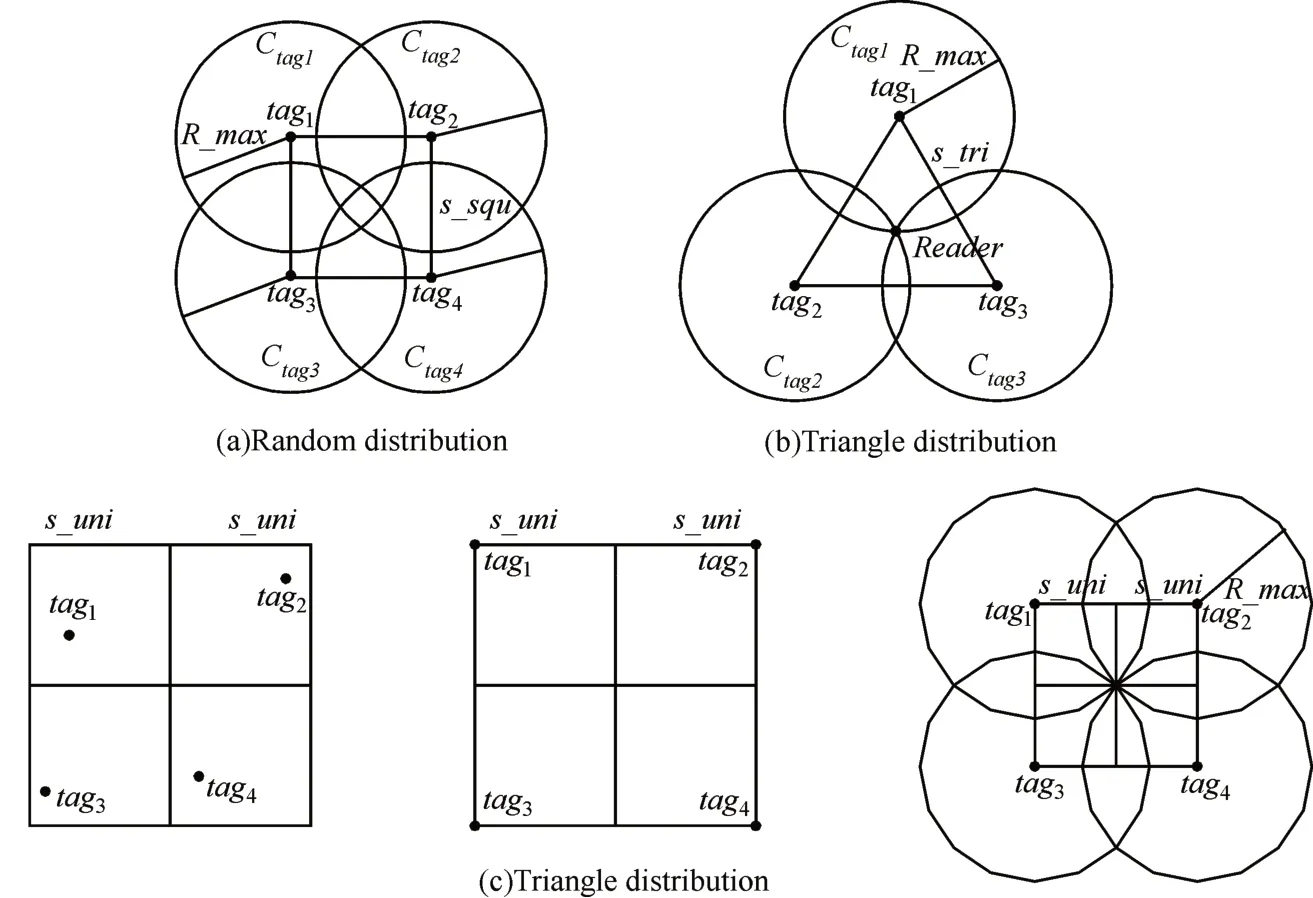
圖1 方形網(wǎng)格、三角形網(wǎng)格、隨機(jī)網(wǎng)格的標(biāo)簽排列方式示意圖
2.2 基于無線射頻識(shí)別的鄰域定位算法
本文在傳統(tǒng)定位算法的基礎(chǔ)上引入了VIRE算法[11]并加以改進(jìn),在某一閱讀器識(shí)別范圍外的標(biāo)簽利用虛擬標(biāo)簽代替。首先估算閱讀器范圍外的虛擬標(biāo)簽集合,并將虛擬標(biāo)簽和設(shè)計(jì)標(biāo)簽的集合相比較,計(jì)算虛擬標(biāo)簽之間的間隔作為修正因子并對(duì)閱讀器的最佳覆蓋半徑不斷調(diào)整。相關(guān)概念定義如下。
1)設(shè)某標(biāo)簽tagi的坐標(biāo)為(xi,yi),以該標(biāo)簽坐標(biāo)為圓心,半徑為Rnei畫圓,將圓內(nèi)所有標(biāo)簽設(shè)置為一個(gè)集合,即初始相鄰標(biāo)簽S1;
2)在圓外范圍內(nèi)且該標(biāo)簽的鄰居標(biāo)簽內(nèi)存在一跳鄰域標(biāo)簽,這種標(biāo)簽的集合為二跳鄰域標(biāo)簽S2;
基于無線射頻識(shí)別的鄰域定位算法具體計(jì)算步驟如下:
(1)中央處理器發(fā)送激活指令,將識(shí)別碼信息傳送至閱讀器,閱讀器再將所有標(biāo)簽的識(shí)別碼信息反饋回上位機(jī)。
(2)上位機(jī)構(gòu)建一跳和二跳標(biāo)簽集合S1和S2。
(3)求取S1內(nèi)所有標(biāo)簽坐標(biāo),計(jì)算S1的中心點(diǎn)坐標(biāo)。

以min(s,Rmax)為半徑做圓C_vir。
(4)以式(10)求取的中心點(diǎn)坐標(biāo)為基準(zhǔn),向x和y方向以l為間距插入虛擬標(biāo)簽vir_tag,則該虛擬標(biāo)簽的集合為

p、q為非負(fù)實(shí)數(shù)。
(5)構(gòu)建一跳和二跳集合S1和S2,比較Sref與S1、S2內(nèi)所有標(biāo)簽的距離,設(shè)Sref中虛擬標(biāo)簽的數(shù)量為Num_T個(gè),則這些虛擬坐標(biāo)的平均坐標(biāo)值為通過式(12)即可求得閱讀器坐標(biāo)位置計(jì)算值。圖2所示為利用虛擬標(biāo)簽來尋找閱讀器坐標(biāo)位置的過程示意圖。
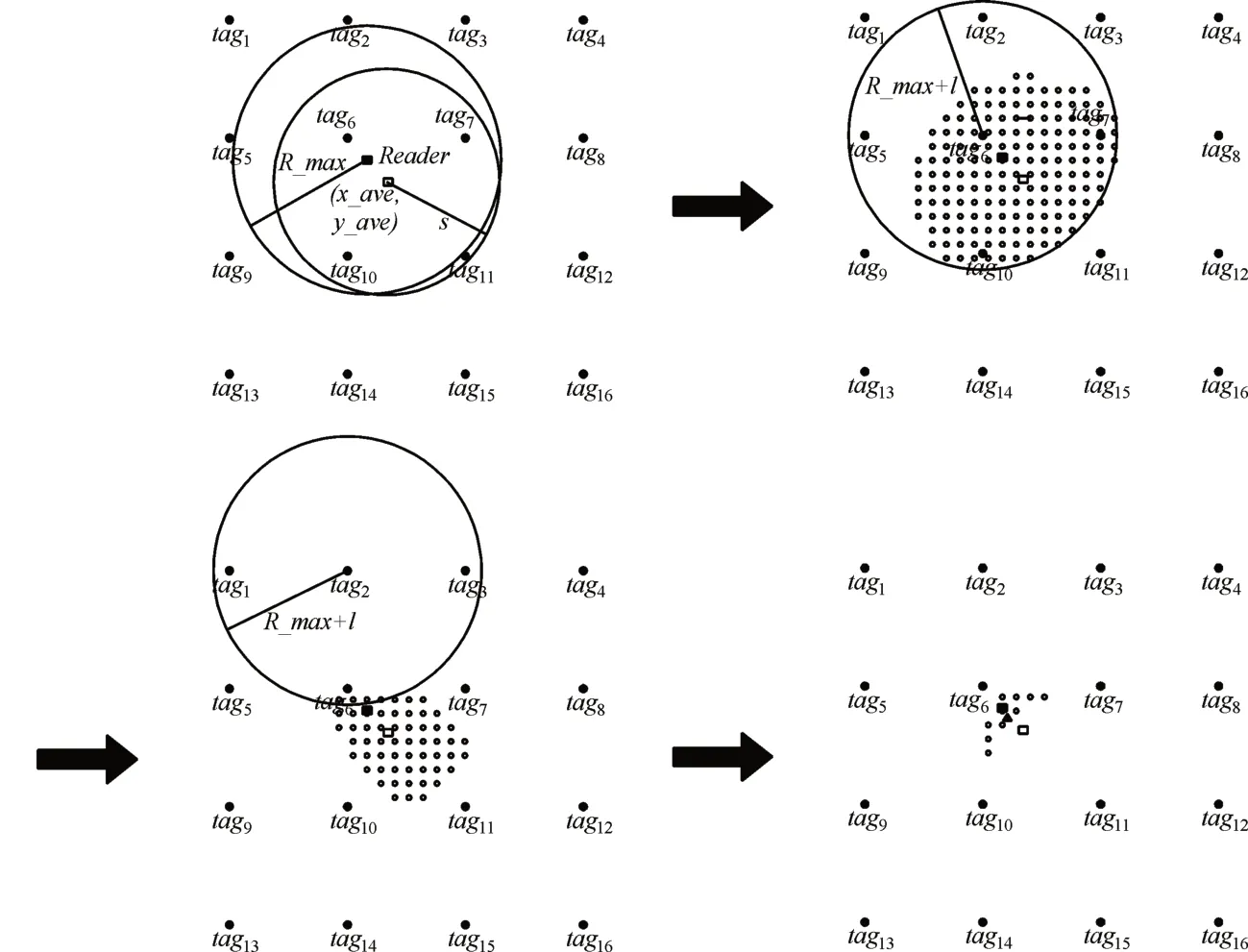
圖2 利用虛擬標(biāo)簽來尋找閱讀器坐標(biāo)位置的過程示意圖

3 仿真試驗(yàn)與分析
仿真軟件為Matlab,最大圓心直徑為10m,仿真區(qū)域?yàn)?00m×100m。表1列舉了方形網(wǎng)格、三角形網(wǎng)格、隨機(jī)網(wǎng)格下S2內(nèi)標(biāo)簽數(shù)目和閱讀器估計(jì)坐標(biāo)之間的計(jì)算結(jié)果。從表中看到,Rnei分別為0.2s和0.5s時(shí),鄰居標(biāo)簽集合為空,此時(shí)本文提出的算法變?yōu)閮H求取標(biāo)簽的平均值;當(dāng)Rnei>s時(shí),鄰居標(biāo)簽與閱讀器的間距越來越大,以距離較遠(yuǎn)的鄰居標(biāo)簽集合的平均坐標(biāo)為圓心形成的圓和S1之間的交集會(huì)包含在其它圓內(nèi),這樣較遠(yuǎn)距離的鄰居標(biāo)簽對(duì)閱讀器位置的估算不會(huì)造成影響。因此,綜合考慮方形網(wǎng)格和三角形網(wǎng)格的Rnei=s,隨機(jī)網(wǎng)格的Rnei=2s。這樣能最大程度地抑制標(biāo)簽隨機(jī)分布對(duì)計(jì)算精度的影響。
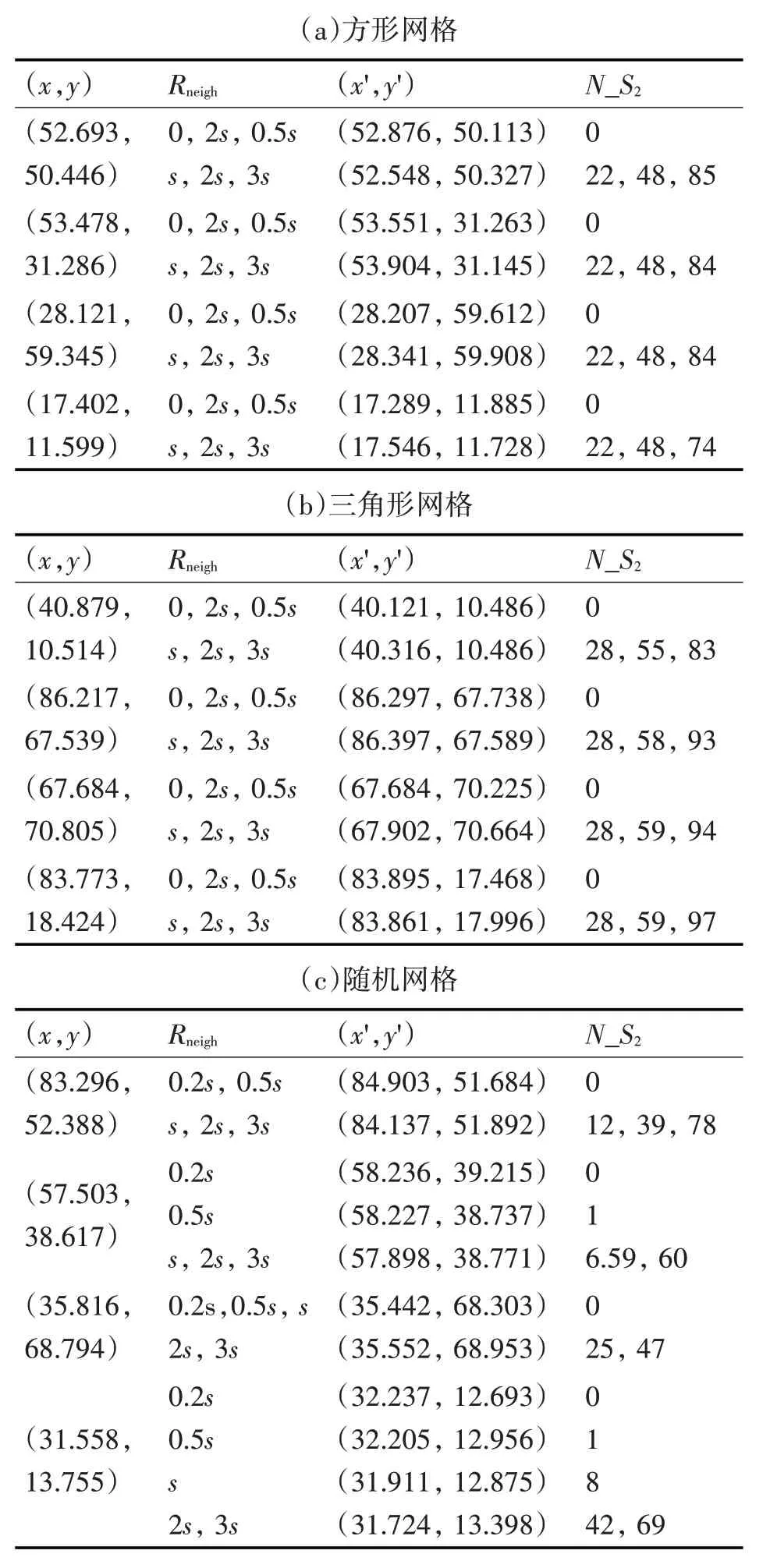
表1 方形網(wǎng)格、三角形網(wǎng)格、隨機(jī)網(wǎng)格下S2內(nèi)標(biāo)簽數(shù)目和閱讀器估計(jì)坐標(biāo)
圖3 列舉了標(biāo)簽距離為s=1m和s=5m時(shí)三種形狀分布下的的估計(jì)誤差均值分布情況。其中橫坐標(biāo)為l=0.05s、0.1s、…、0.5s。從圖中看到,當(dāng)l逐漸增大時(shí),對(duì)閱讀器的估計(jì)誤差也逐漸增大。但當(dāng)l值過小時(shí),一定范圍內(nèi)的虛擬標(biāo)簽數(shù)量就越多,計(jì)算量就越大。從圖中看到,當(dāng)l>0.3s時(shí)三條曲線的上漲幅度開始減緩,因此可將l值設(shè)置為l=0.3s。
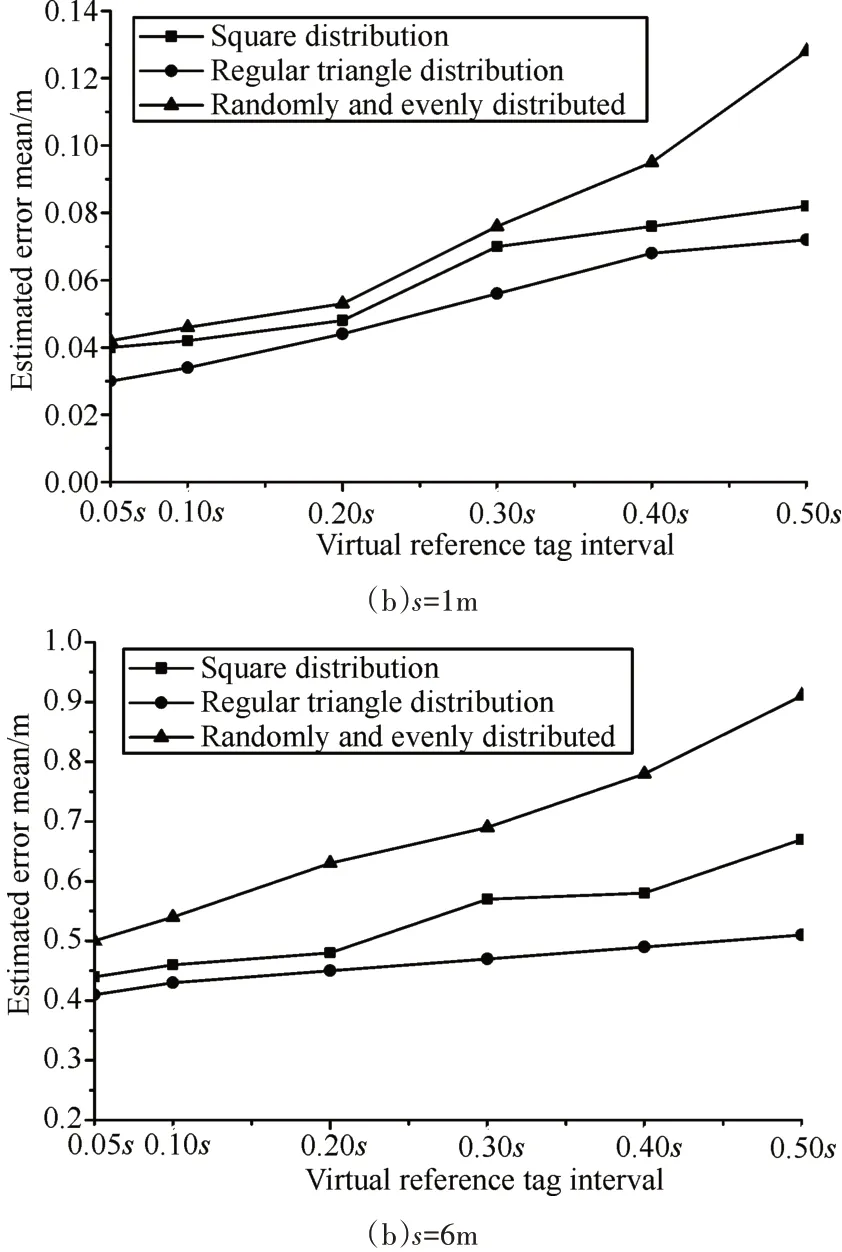
圖3 利用虛擬標(biāo)簽來尋找閱讀器坐標(biāo)位置的過程示意圖
表2 為方形網(wǎng)格、三角形網(wǎng)格、隨機(jī)網(wǎng)格在不同標(biāo)簽距離下的估計(jì)誤差和方差σ2。從表中看到,s與估計(jì)誤差和σ2呈正比,且標(biāo)簽間距設(shè)置過大會(huì)導(dǎo)致某一閱讀器識(shí)別范圍內(nèi)沒有標(biāo)簽。從表中看到,采用三角形網(wǎng)格排列標(biāo)簽時(shí)其最大定位誤差僅為3m,其定位優(yōu)勢(shì)明顯優(yōu)于其他兩種標(biāo)簽排列方式。
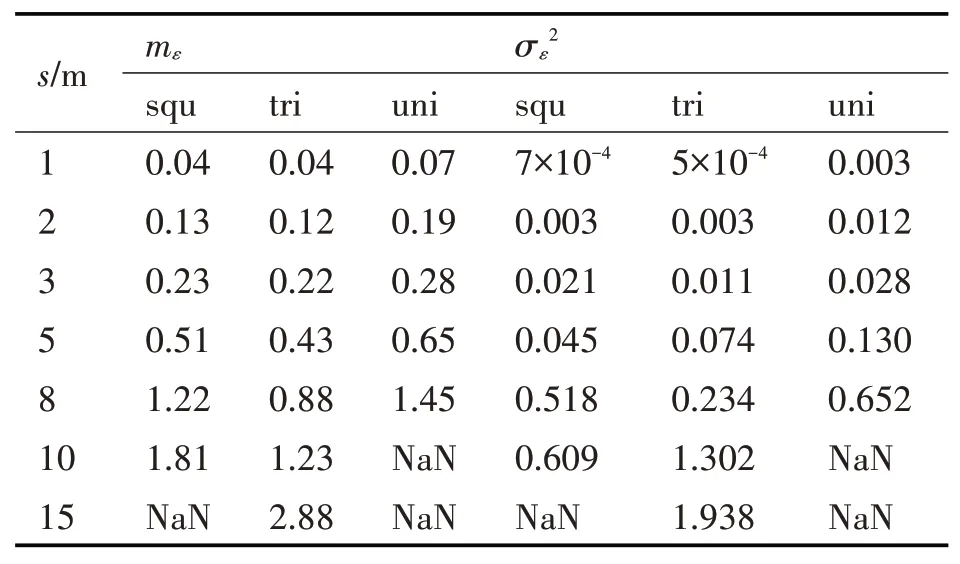
表2 方形網(wǎng)格、三角形網(wǎng)格、隨機(jī)網(wǎng)格在不同標(biāo)簽距離下的估計(jì)誤差
圖4 為不同標(biāo)簽間距下目標(biāo)移動(dòng)估計(jì)路徑,其中圖5(a)為目標(biāo)實(shí)際運(yùn)動(dòng)軌跡。從圖中看到,當(dāng)標(biāo)簽距離為3m時(shí),利用三角形網(wǎng)絡(luò)的目標(biāo)位置估計(jì)與真實(shí)位置之間基本無差別;當(dāng)標(biāo)簽距離逐漸增大時(shí),估計(jì)誤差也隨之增大,但基本能反應(yīng)目標(biāo)的真實(shí)移動(dòng)路線。說明本文提出的算法對(duì)移動(dòng)物體的位置估計(jì)也是可行的。
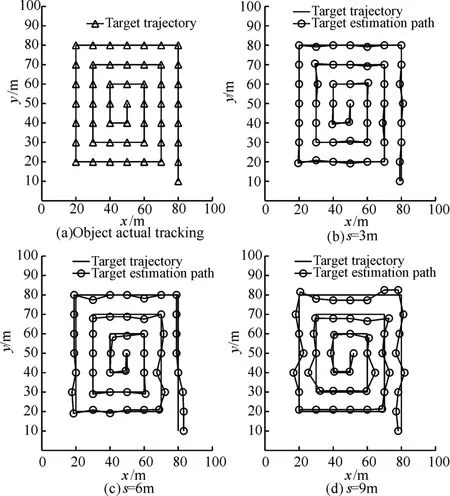
圖4 不同標(biāo)簽間距下目標(biāo)移動(dòng)估計(jì)路徑
圖5 所示為在實(shí)際情況下的測(cè)試結(jié)果。測(cè)試區(qū)域?yàn)?0m×30m,標(biāo)簽間距為2m,閱讀器的位置坐標(biāo)為(9.0m,10.5m),共測(cè)試20次,測(cè)試誤差如圖6所示。從圖中看到,實(shí)際測(cè)試結(jié)果的估計(jì)誤差要大于仿真結(jié)果,測(cè)試結(jié)果呈波動(dòng)狀態(tài)。這是由于實(shí)際環(huán)境復(fù)雜,且閱讀器天線接受信號(hào)具有方向性,標(biāo)簽與閱讀器之間的距離過大時(shí),閱讀器識(shí)別角度則越來越小,導(dǎo)致估計(jì)誤差較大。同時(shí),閱讀器在識(shí)別過程中存在漏讀和誤讀現(xiàn)象。這些均導(dǎo)致無線射頻識(shí)別定位存在一定誤差。
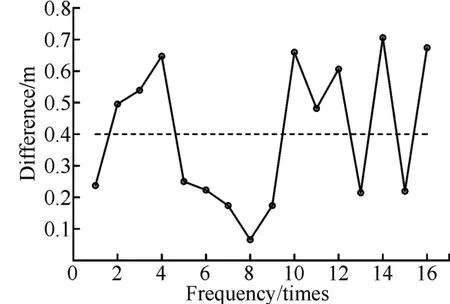
圖5 實(shí)際測(cè)量結(jié)果誤差
4 結(jié)語
本文擬采用無源標(biāo)簽對(duì)物體進(jìn)行定位,基于多跳鄰域定位的思想對(duì)傳統(tǒng)無線射頻識(shí)別定位算法進(jìn)行優(yōu)化,提出的優(yōu)化算法僅需考慮無線射頻識(shí)別系統(tǒng)的最基礎(chǔ)功能,無需考慮閱讀器和標(biāo)簽之間的信號(hào)傳輸強(qiáng)度,極大地簡化了定位識(shí)別系統(tǒng)的成本,并增加其魯棒性和抗干擾特性。研究結(jié)論如下:
1)通過計(jì)算得到方形網(wǎng)格和三角形網(wǎng)格的Rnei=s,隨機(jī)網(wǎng)格的Rnei=2s。當(dāng)l逐漸增大時(shí),對(duì)閱讀器的估計(jì)誤差也逐漸增大。但當(dāng)l值過小時(shí),一定范圍內(nèi)的虛擬標(biāo)簽數(shù)量就越多,計(jì)算量就越大,可將l值設(shè)置為l=0.3s。
2)s與估計(jì)誤差和σ2呈正比,且標(biāo)簽間距設(shè)置過大會(huì)導(dǎo)致某一閱讀器識(shí)別范圍內(nèi)沒有標(biāo)簽。采用三角形網(wǎng)格排列標(biāo)簽時(shí)其最大定位誤差僅為3m,定位優(yōu)勢(shì)明顯優(yōu)于其他兩種標(biāo)簽排列方式。仿真結(jié)果同樣表明本文提出的算法對(duì)移動(dòng)物體的位置估計(jì)也是可行的。
