一種智能清洗設備控制系統的設計與實現?
2021-08-08 10:57:02周廣益王安敏
計算機與數字工程 2021年7期
李 鋒 周廣益 王安敏
(青島科技大學機電工程學院 青島266061)
1 引言
隨著科技的進步,人們生活質量提高,雙手也得到解放,像是自動洗衣機和刷鞋機的使用。但這些清洗設備也存在很多詬病,比如現有的刷鞋機,依靠滾筒工作,工作方式極其死板機械,容易對鞋子的外形造成傷害,嚴重影響美觀[1]。而且滾筒內工作還會存在鞋子開膠,滾筒內殘留鞋底污物等缺點。
根據這些問題的啟發,本文設計了一種針對于關節假體且基于STC89C52RC單片機的智能清洗設備系統。該系統采用集成芯片HX711檢測壓力,確保假體不同也可以被夾緊,當清洗完畢后,蜂鳴器會報警提醒用戶取走假體;超聲波模塊來檢測工作機構與假體的距離;液位控制模塊可以在設備水箱中水量不足時啟動水泵向水箱加水;報警信息等需要被顯示的數據將顯示到LCD1602液晶屏上。
2 系統總體方案的設計
本設計中最主要的芯片是STC89C52RC,用來控制各個模塊的協調配合。該系統大體分為電源模塊、壓力檢測模塊、液位檢測模塊、超聲波模塊、電機驅動模塊、輸出模塊,總體設計框圖如圖1所示。
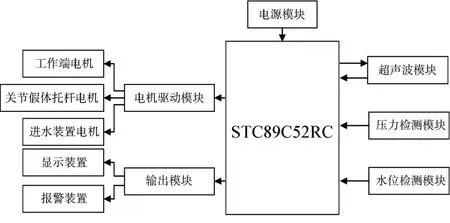
圖1 系統總框架圖
3 系統硬件設計
3.1 電源模塊
電源是整個系統正常運行的前提條件,STC89C52RC和其他功能模塊都是在5V直流電源下工作的,所以要給系統提供5V的直流電源。一般家用電為220V交流電,所以須將此電流通過降壓變壓器將為12V交流電然后通過橋式整流器、電容濾波后得到10.8的直流電,還要再后面加一個集成穩壓塊和一個較大電容儲能來穩定電壓,使得輸出電壓不因負載變化而變化。為保證系統正常運行,還要在設計的5V電源后加TR1972-33,是的電壓保持在4.4V[2],電路圖如圖2所示。
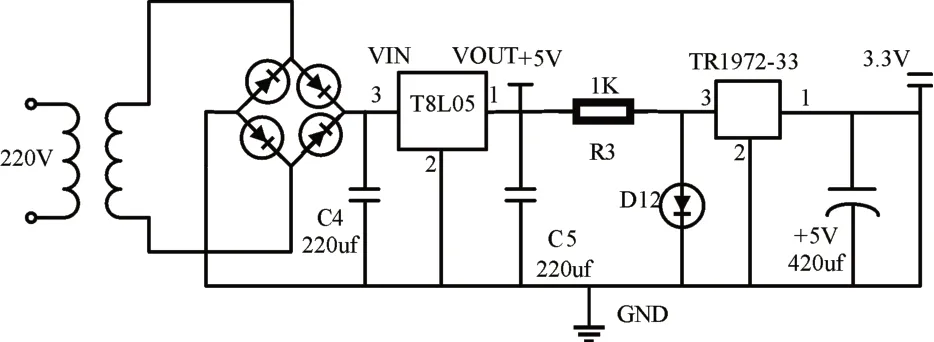
圖2 電源電路圖
3.2 壓力檢測模塊
因為各種關節假體各不相同,所以要借助壓力檢測模塊讓系統知道關節假體是否被壓緊。壓力傳感器選用電阻應變片壓力傳感器構成電橋[3],將物體的重力轉化為電壓信號。因為單片機不能接收模擬信號,所以壓力檢測模塊得到的數據必須經過模數轉換才可以被單片機所獲得。集成芯片HX711同時具有信號放大和模數轉換的功能[4],故選用該芯片。
3.3 液位檢測模塊
因為該設備體積較小,存儲水量有限,所以需要液位檢測保證工作正常進行。該設計中選用的是電阻式傳感器,該傳感器成本和精度都可以滿足設備使用。它得到的是一種0V~5V的電壓信號,因此只要找到電壓與液位的關系,單片機控制系統就可以根據換算公式將得到的電壓信號轉換為液位高度[5],當液位過低時啟動進水裝置,達到設定液位停止進水裝置停止工作。
3.4 超聲波模塊
為保證設備的工作,超聲波傳感器可以確保工作端刷頭和關節假體的距離,保證刷毛可以最高效率的完成工作,選用HC-SR04超聲波模塊,電壓滿足直流5V,可以實現自動檢測信號是否返回,測試距離=(高電平時間*聲速(340m/s))/2,精度可以達到3mm[6]。
3.5 電機驅動模塊
設備工作端、假體托桿伸長、進水裝置的工作都需要電機,而電機驅動模塊則是保證電機正常工作的重要手段,本設計中采用L293D驅動芯片驅動[7]。
3.6 輸出模塊
輸出模塊分為顯示裝置和報警裝置,顯示裝置會把此時液位位置、壓力檢測模塊反饋值等數據顯示在LCD1602液晶屏上;報警裝置會在工作完成和液位長時間不足時報警。
4 系統軟件設計
本系統的所有軟件程序采用Keil uVision4的51版本編程[8~9],該程序提供在線仿真調試功能。主程序流程圖如圖3所示。
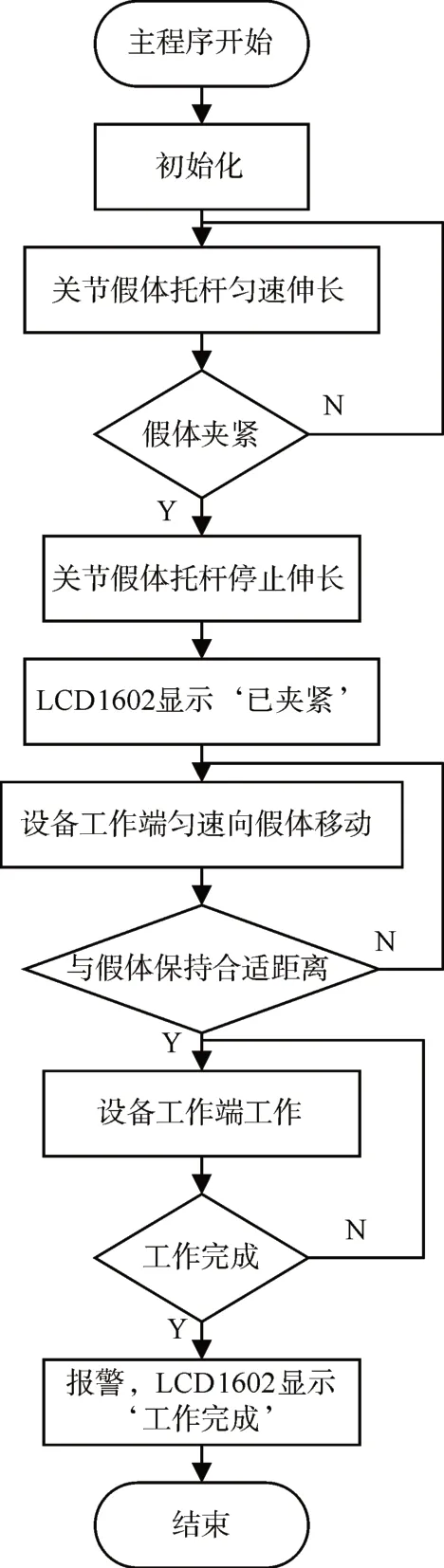
圖3 主程序流程圖
首先,對系統進行初始化,初始化結束后假體托桿開始工作,當壓力檢測模塊將接收的數據經過模數轉換傳遞給單片機后,數據經單片機STC89C53RC計算并把之前設定需要顯示內容送到LCD1602液晶屏;設備工作端勻速向假體位置靠近,超聲波模塊會一直檢測其間的距離,直至到達程序設定的距離;到達設定距離,工作端刷頭開始工作,超聲波模塊繼續工作,當接收的數據達到程序認定的工作完成時,蜂鳴器響,報警系統工作,并在LCD1602上顯示“工作完成”,讓用戶知道是清洗結束。
其次,該設備還用到定時器中斷功能,保持每隔一段時間對液位進行檢測,即液位檢測模塊。
5 供水系統控制
因為考慮到經濟性和便利性,本設計的水箱的體積受到很大約束,進水速度和液位的起伏波動都會對液位檢測造成影響,這就要求提高供水系統的控制精度。
5.1 PID控制系統
PID典型的控制算法為

其中,Kp為比例放大系數,TI為積分時間,TD為微分時間。
上述只是PID控制算法的大體設計思路,但是,對于本系統而言,我們PID控制算法的設計采用實時監測液位的方法,因此必須先對信號進行采樣,然后根據采樣時刻的偏差值來計算,所以對于式(1)要進行離散化處理[10]。處理之后的表達式為

由此可以看出本系統中我們對系統的電壓值的信號是使用的數字量,而不是模擬量,即經過對算法系統的離散化,就轉變成了數字PID控制[11~14]。系統PID控制將采用圖4所示框架圖。

圖4 供水系統控制原理框圖
5.2 神經網絡PID控制
神經網絡PID算法即將神經網絡算法與PID算法相結合,神經網絡算法的特點是對樣本值進行訓練,而對于本系統來講,如何獲取樣本值呢?對此,可以把進水裝置設備看作一個輸出層,直接讓神經網絡對輸出的電壓值作為樣本進行訓練。本系統中,被控對象會通過神經網絡算法反復訓練,尋找最佳控制方式,隨后對PID控制算法的參數進行修正。神經網絡PID控制系統結構框圖如圖5所示。
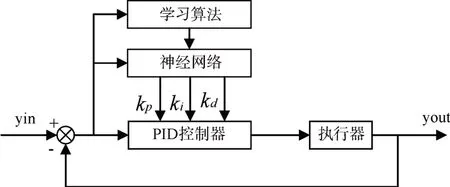
圖5 神經網絡PID控制原理框圖
神經網絡算法設計實現過程如下[15~16]。
設輸入網絡的數學表達式為

輸出層表達式為

這里三個輸出分量分別對應于PID控制算法中三個可調節控制參數,即:

輸出層激活函數為

性能指標函數為

由此可得輸出的訓練算法為

其中:
這樣,就可以對該系統進行神經網絡算法的訓練,以達到更高的控制精度。
6 結語
在系統開發過程中,運用了多個方面的傳感器技術,對于傳感器檢測和單片機控制的對接,我們查閱了大量資料。傳感器的應用讓我們的控制更加智能便捷,神經網絡PID控制算法的加入也讓進水裝置控制精度和平滑度有了很大的提高。因為對自動清洗設備進行了工作方式優化,所以自身清潔力度都有所削減,下一步將對此進行更深層的研究。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
海峽科技與產業(2016年3期)2016-05-17 04:32:12
汽車維護與修理(2015年2期)2015-02-28 12:15:41
