基于柵格地圖的環境建模在清掃機器人路徑規劃中的應用
2021-08-06 15:24:08周欣沅張玲馬永帥
中小企業管理與科技·上旬刊 2021年7期
周欣沅 張玲 馬永帥

【摘 ?要】論文采用柵格法建立環境地圖模型,利用沿邊走的路徑規劃算法進行室內清潔機器人無障礙與避障路徑規劃仿真試驗。結果表明,在靜態環境中,掃地機器人可以根據內螺旋式路徑規劃方法完成清掃任務,面積覆蓋率高,重復率低,且能成功避開所設置的障礙物和邊界,進行自動定位和轉向。該方法與隨機式路徑規劃方法相比效果很好。
【Abstract】The paper uses the grid method to establish the environment map model, and uses the side-walking path planning algorithm to carry out the simulation test of the obstacle-free and obstacle-avoidance path planning of the indoor cleaning robot. The results show that in the static environment, the cleaning robot can complete the cleaning task according to the internal spiral path planning method, with high area coverage rate and low repetition rate, and can successfully avoid the obstacles placed and boundaries, and carry out automatic positioning and steering. Compared with the random path planning method, the effect of this method is very good.
【關鍵詞】清掃機器人;柵格法;環境建模
【Keywords】cleaning robot; grid method; environment modeling
【中圖分類號】TP242;TP212 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 【文獻標志碼】A ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 【文章編號】1673-1069(2021)07-0183-02
1 引言
隨著科技發展,機器人技術趨于成熟。如何才能使掃地機器人真正做到高效率、高智能、低成本的清掃工作是目前研究的重點,其中工作環境的模型選擇及路徑規劃是實現工作區域全覆蓋這一目標的難點[1]。為此,環境柵格地圖構建與路徑規劃算法是實現此目標的兩項關鍵技術。本文使用柵格法對地圖環境進行環境建模,采取沿邊行走內螺旋式路徑規劃算法進行路徑規劃與仿真實驗。
2 環境建模方法
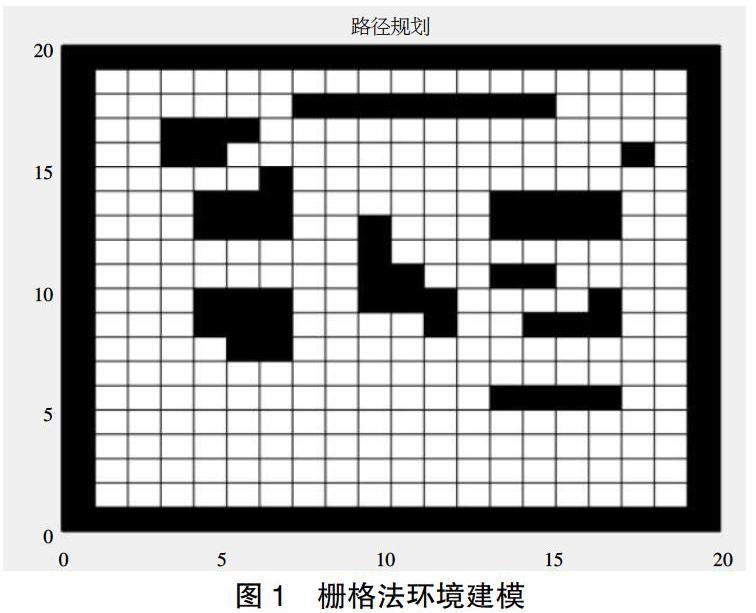
環境建模方法是將機器人工作的虛擬現實環境轉化成能自身準確識別環境信息的過程。目前,環境建模方法主要有:拓撲法、幾何法和柵格法。拓撲法大大減少了幾何路徑特征規劃的基本工作量和復雜度,實現了從高維向低維的轉化。難點體現在如何定義拓撲節點[2]。幾何法是將傳感器采集到的環境信息轉化為常見的物理幾何特征,并表示出來。優點是精確度高、結構性緊湊、容易準確地判斷位置信息和識別目標;缺點是提取幾何特征時需要足夠多的傳感器數據。柵格法是將機器人工作空間信息路徑環境利用相同的尺寸和大小的柵格進行綜合分割,然后通過記錄自身所在位置的路徑環境空間信息,完成整個路徑環境規劃構建。相比而言,柵格法更能精準地表達出地理信息。利用柵格法進行環境建模時,柵格地圖的尺寸要考慮以下4點:①房間清掃面積及障礙物數量;②根據路徑規劃方法制定具體路徑和柵格地圖大小;③環境地圖中柵格尺寸大小;④計算機的運算能力和反應能力。本文使用柵格法對地圖環境進行建模,將房間看作規則的矩形,掃地機器人的大小作為基本清掃單位,根據需要清掃的范圍把房間劃分成若干個不相同、不重疊的單元格。每一個單元格代表一個自由區或障礙區,在自由區內機器人是可以自由活動的,在障礙區內機器人不能通過。如圖1所示,白色柵格表示自由區域,黑色柵格表示障礙物。
3 路徑規劃算法與衡量指標
3.1 基于環境模型的路徑規劃方法
掃地機器人的路徑規劃是依據感知到的周圍環境信息設定的路徑規劃算法,規劃出一條能實現對工作區域最大覆蓋率且與周圍環境不會產生任何碰撞的清掃路徑[3]。路徑規劃方法大致可以分2類:無環境分析模型的路徑規劃方法和基于環境模型的路徑規劃方法。無環境模型的路徑規劃方法是將隨機工作方式與局部遍歷規劃結合的方式,前提是要有充足的時間和耐心,這樣掃地機器人的規劃路徑才能全面覆蓋所工作的區域,但是此方式工作效率較低。基于環境模型的路徑規劃方法是依據環境信息按照一定的方法來建立環境模型,再按照確定的路徑規劃算法尋找最優或近似最優路徑,這種方式可確保具有最大的覆蓋率和最小的重復率。缺點是定位和環境建模的技術還不夠成熟[4]。
在實際的清掃環境中,肯定有障礙物的存在。本文主要研究掃地機器人基于環境模型的路徑規劃方法,通過采用沿邊行走的內螺旋式路徑規劃算法來實現避障,機器人沿著墻壁或者障礙物的邊界進行移動。在避障過程中,可能遇到以下4種情況:①障礙物形狀大都不規則,全部按照矩形處理,即采用包絡法做不規則障礙物的矩形界線;②沿墻放置及墻壁上的障礙物通常被視為墻壁,掃地機器人在工作時沿著障礙物的邊緣行走;③非靠墻設置的障礙物繞開即可;④掃地機器人行走過程中不斷地進行角度、速度、方向的調整。每工作完一圈,都經歷4種不同的方向(上、下、左、右)。
在避障路徑規劃中,機器人需要在工作時對障礙物進行檢測并對數據進行處理。其中,邊界可視為障礙物。行走前,機器人向右搜索有沒有障礙物,若存在則按照沿邊走的內螺旋式路徑規劃算法沿著障礙物邊緣進行避障,重新選擇運動方向,若障礙物不存在,則按照原方向繼續行走。
3.2 路徑規劃衡量指標
3.2.1 覆蓋率
由式(2)可知,當總面積S一定時,Sp越小,重復率p的數值越小,重復覆蓋率越小,掃地機器人的路徑規劃越合理。
3.2.3 時效性
時效性t是指機器人全部清掃完所需打掃的面積時所用的最短時間,t的值越低,越反映機器人路徑規劃的合理性。
3.2.4 能量消耗率
能量消耗率η是指清潔任務完成時電池耗電量的比值。
考慮到本文的試驗條件,本文僅采用覆蓋率和重復率來衡量路徑規劃算法。
4 實驗分析
4.1 路徑規劃仿真
在靜態環境中,本文使用MATLAB軟件,在22×18的柵格區域內,將它們建立在由一個傳統的矩形柵格所直接構建的二維矩形平面中,采用隨機路徑規劃與沿邊走的內螺旋式路徑規劃進行仿真實驗,實驗結果如圖2和圖3所示。將機器人所走過的路徑都標記為紅色,把障礙物標記為黑色,環境建模時由于機器人體積問題無法直接進入的地方直接規劃為障礙物。
4.2 結果分析
由圖2可知,掃地機器人是按照隨機式路徑規劃算法執行清掃任務,清掃面積覆蓋率為10.4%,重復率為80.6%,而且在工作過程中規劃的路線隨機,不能自動定位和轉向,效果不佳。由圖3可知,掃地機器人按照沿邊行走內螺旋式路徑規劃算法執行清掃任務,清掃面積覆蓋率為99.3%,重復率為1.1%,并且在工作過程中能自動避開邊界,自動定位和轉向,效果好。
5 結論
本文采用柵格法建立了環境地圖柵格模型,利用沿邊行走的內螺旋路徑規劃算法,對室內地面進行避障路徑規劃與仿真試驗。結果表明,在靜態環境中掃地機器人沿內螺旋式路徑規劃方法進行清掃,面積覆蓋率高,重復率較低,同時,能夠避開障礙物和邊界,有序進行自動定位和轉向,比隨機式路徑規劃方法清掃效率高。
【參考文獻】
【1】呂后勇.室內機器人全覆蓋路徑規劃方法研究[D].咸陽:西北農林科技大學,2016.
【2】于紅斌,李孝安.基于柵格法的機器人快速路徑規劃[J].微電子學與計算機,2005(6):98-100.
【3】梁喜鳳.室內地面清潔機器人路徑規劃[J].中國計量學院學報,2006(1):64-68.
【4】穆莉莉,祁娜娜,汪淺予,等.基于多傳感器融合的掃地機器人路徑規劃設計[J].東莞理工學院學報,2020,27(5):117-121.
【5】徐勝華,宋樹祥,佘果.一種掃地機器人路徑規劃的改進算法[J].測控技術,2017,36(2):120-123+127.
