基于Frenet坐標(biāo)的虛擬角色路徑規(guī)劃算法的研究
2021-08-06 05:24:16陳漢偉陳光浩陳威
現(xiàn)代計算機 2021年16期
關(guān)鍵詞:規(guī)劃
陳漢偉,陳光浩,陳威
(浙江安防職業(yè)技術(shù)學(xué)院,人工智能學(xué)院,溫州 325000)
0 引言
在虛擬現(xiàn)實仿真場景中,虛擬角色路徑規(guī)劃始終是需要解決的關(guān)鍵問題[1]。虛擬角色往往需要沿一條合理的路徑從起始位置移動到結(jié)束位置,移動過程中要避開障礙物、保證自身移動速度,并且在偏離路線后,需要及時調(diào)整移動狀態(tài),回到既定路線。現(xiàn)有的路徑規(guī)劃算法,雖然可以進行路徑規(guī)劃,但是存在路徑軌跡不夠真實、算法復(fù)雜度高或是無法應(yīng)對復(fù)雜場景等問題。
針對虛擬現(xiàn)實仿真場景中的虛擬角色路徑規(guī)劃問題,提出了一種基于Frenet坐標(biāo)的虛擬角色路徑規(guī)劃算法,算法根據(jù)已知的障礙物信息,較快地為虛擬角色規(guī)劃路徑,路徑平滑有效,能夠合理避開既有的障礙物。算法將虛擬角色和障礙物的位置信息轉(zhuǎn)換到Frenet坐標(biāo)當(dāng)中[2],推算最優(yōu)的運動軌跡,進而實現(xiàn)虛擬角色的障礙避讓、速度持續(xù)性以及合理并線等智能行為,算法性能較好,且模擬動畫效果真實,具備一定的應(yīng)用價值。
1 基于Frenet坐標(biāo)的虛擬角色路徑規(guī)劃算法
1.1 Frenet坐標(biāo)與笛卡爾坐標(biāo)的映射關(guān)系
在虛擬場景中,虛擬角色需要沿參考軌跡移動,但因為需要避開障礙物,實際規(guī)劃路徑和參考軌跡會產(chǎn)生偏差。路徑在笛卡爾坐標(biāo)中,虛擬角色與參考軌跡的位置關(guān)系處理方法相對復(fù)雜。然而,在Frenet坐標(biāo)系下,以參考軌跡為依據(jù)建立坐標(biāo)系統(tǒng),虛擬角色與參考軌跡的位置關(guān)系可簡易的表述為橫向偏移量d(t)和縱向偏移量s(t),如圖1所示。

圖1 Frenet坐標(biāo)與笛卡爾坐標(biāo)的映射關(guān)系
d(t)表示虛擬角色實際位置和參考軌跡映射點之間產(chǎn)生的垂直距離,s(t)代表虛擬角色沿著參考軌跡移動的曲線距離。實際規(guī)劃路徑的點可以表示為:
x(s(t),d(t))=r(s(t))+d(t)nr(s(t))
(1)
其中向量nr,tr分別表示,虛擬角色在參考路徑上映射點的法向量和切向量,r(s(t) )表示虛擬角色當(dāng)前運動狀態(tài)下的笛卡兒坐標(biāo),nx,tx表示路徑規(guī)劃點的法向量和切向量[3]。
虛擬角色的路徑規(guī)劃,就是要將其當(dāng)前狀態(tài)的位置、方向、曲率、速度和加速度信息先映射到Frenet坐標(biāo)系下,通過求解Jerk最優(yōu)化問題,得到備選路徑集合,然后將規(guī)劃的路徑點轉(zhuǎn)換回笛卡爾坐標(biāo)系下,并推算出最優(yōu)路徑,使虛擬角色能夠快速合理的移動。即存在如下轉(zhuǎn)換關(guān)系:

在笛卡爾坐標(biāo)系下:x表示坐標(biāo)向量;θx表示虛擬角色的朝向;κx表示曲率;vx表示速度,ax表示加速度。
1.2 笛卡爾坐標(biāo)映射到Frenet坐標(biāo)
當(dāng)[x,θx,κx,vx,ax]已知,s是參考路徑點的一個自變量[4-5]:
d=[x-r(s)]Tnr
(3)




橫向坐標(biāo)對縱向坐標(biāo)的導(dǎo)數(shù)d′表示為:
d′=(1-κ,d)tanΔθ(6)
橫向坐標(biāo)對縱向坐標(biāo)的二階導(dǎo)數(shù)d″表示為:

(7)

(8)


1.3 Frenet坐標(biāo)映射到笛卡爾坐標(biāo)

x=r(s)+nrd
(10)
根據(jù)公式(4),可推導(dǎo)速度vx為:

根據(jù)公式(6),可知朝向θx為:

加速度ax是vx的導(dǎo)數(shù),表示為:
(13)

曲率κx表示為:
(14)
1.4 Frenet坐標(biāo)系中的路徑規(guī)劃
虛擬角色的路徑規(guī)劃問題可視為分別在水平方向s和垂直方向d上求解Jerk最優(yōu)化問題,故針對不同的初始狀態(tài)(d0,s0)、結(jié)束狀態(tài)(d1,s1)及時間差Δt,可分別定義橫向和縱向的損失函數(shù)[9-10]:
(15)

而其最優(yōu)解可使用五次多項式表示:
d(t)=αd0+αd1t+αd2t2+αd3t3+αd4t4+αd5t5(17)
s(t)=αs0+αs1t+αs2t2+αst3+αs4t4+αs5t5(18)
通過調(diào)整結(jié)束狀態(tài)的值,獲得水平方向備選路徑集合Pd和垂直方向備選路徑集合Ps,將兩個集合進行笛卡爾卷積運算Pd×Ps,通過加權(quán)橫向和縱向的損失函數(shù),獲得新的損失函數(shù)Cpath=kdCd+ksCs,剔除會與障礙物碰撞的路徑,最終確定最優(yōu)規(guī)劃路徑。
2 算法的實現(xiàn)及應(yīng)用
本文基于Blender平臺構(gòu)建虛擬角色的移動場景,場景中包含虛擬角色,參考的行動路線,及若干障礙物,如圖2所示。

圖2 構(gòu)建虛擬場景
基于Frenet坐標(biāo)的虛擬角色路徑規(guī)劃算法具體實現(xiàn)方式如下:
(1)首先,算法獲取笛卡爾坐標(biāo)下的虛擬角色運動狀態(tài)[x,θx,κx,vx,ax],作為算法輸入?yún)?shù);
(2)算法先將虛擬角色的運動狀態(tài)通過公式(3)-(9)映射到Frenet坐標(biāo)系中;
(3)在Frenet坐標(biāo)系中求解Jerk最優(yōu)化問題,得到備選路徑集合;
(4)根據(jù)參考路徑的信息,將Frenet路徑集合通過公式(10)-(18)映射到笛卡爾坐標(biāo)系中;
(5)執(zhí)行障礙物檢測,并校驗相關(guān)約束條件,剔除集合中不滿足條件的路徑;
(6)最終輸出最優(yōu)路徑,虛擬角色根據(jù)最優(yōu)路徑調(diào)整自身運動狀態(tài),沿最優(yōu)路徑執(zhí)行移動任務(wù)。
算法流程如圖3所示。

圖3 算法實現(xiàn)流程
3 算法效果及分析
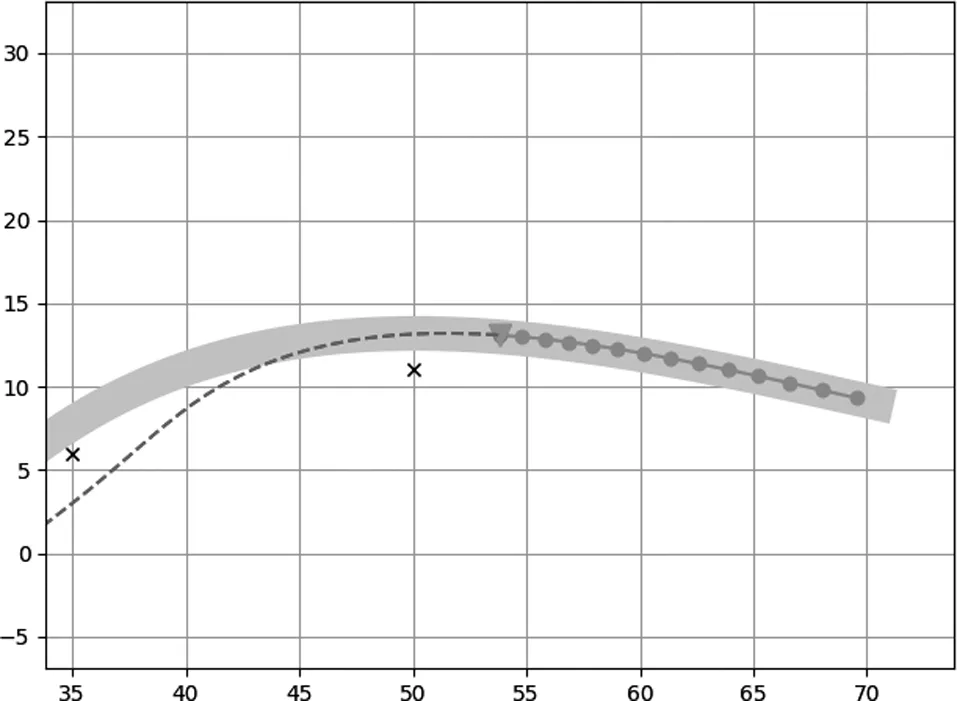
為驗證算法性能,本文進行了多組路徑跟蹤試驗。在試驗中,虛擬角色需要沿預(yù)先設(shè)定的參考路徑執(zhí)行移動任務(wù)。在圖4場景中,虛擬角色需沿一條多彎曲線進行移動,寬線為參考路徑,虛線為實際移動路徑,點狀連續(xù)線表示規(guī)劃路徑。圖4-a顯示虛擬角色在無障礙的路徑中,實際移動路徑和參考路徑近似,運行穩(wěn)定;當(dāng)參考路徑中出現(xiàn)障礙物,路徑規(guī)劃算法會充分考慮障礙物的位置信息,并在路徑規(guī)劃時,逐步避開障礙物,如圖4-b所示;當(dāng)避開所有障礙物后,虛擬角色又逐步回到參考路徑的中線上,直至完成移動任務(wù)。

4-a 無障礙狀態(tài)移動

4-b 有障礙狀態(tài)移動
4-c 恢復(fù)無障礙狀態(tài)移動
而在圖5場景中,虛擬角色處于全程無障礙的相對特殊場景中執(zhí)行移動任務(wù)。在圖5-a和圖5-b場景中,虛擬角色的實際移動路徑依然較好地趨近參考路徑的中心線;在圖5-c中,虛擬角色在經(jīng)過第一個曲率較大的彎道時,已無法保持在參考路徑的中線,產(chǎn)生一定的軌跡偏離,但能夠迅速調(diào)整,回到參考路徑的中線上繼續(xù)移動;在圖5-d中,因彎道曲率過大,虛擬角色已無法完成正常的路徑規(guī)劃,有待進行改進和優(yōu)化。

5-a 全程無障礙場景一

5-b 全程無障礙場景二

5-c 全程無障礙場景三
5-d 全程無障礙場景四
4 結(jié)語
本文提出了一種基于Frenet坐標(biāo)的虛擬角色路徑規(guī)劃算法,根據(jù)已知的障礙物信息,較快地為虛擬角色規(guī)劃路徑,路徑平滑有效,能夠避開障礙物并保證路徑的合理性。算法將虛擬角色和障礙物的位置信息轉(zhuǎn)換到Frenet坐標(biāo)當(dāng)中,構(gòu)建路徑的五次多項式備選路徑集合,通過障礙物位置信息等特定約束條件推算最優(yōu)的運動軌跡,進而實現(xiàn)虛擬角色的障礙避讓、速度持續(xù)性以及合理并線等智能行為,算法性能較好,適用于虛擬角色移動的多數(shù)場景,且模擬效果真實,在虛擬角色仿真場景中具備一定的應(yīng)用價值。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機床(2017年3期)2017-06-23 08:11:34
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
