乘波體飛行器低復雜度預設性能反演控制方法
2021-08-05 02:29:41姜寶續卜祥偉齊強
航空兵器 2021年2期
姜寶續 卜祥偉 齊強
摘 要: 針對傳統神經網絡預設性能控制方法結構復雜、控制實時性不高等問題,為乘波體飛行器(Waverider Vehicle,WV)提出了一種低復雜度的預設性能反演控制方法。首先,設計了一種形式簡單、不依賴初始誤差的新型性能函數,對跟蹤誤差進行包絡約束。其次,采用轉換誤差策略,通過引入一種轉換誤差,將對跟蹤誤差的不等式約束等價轉換為等式約束。然后,基于轉換誤差,為WV設計了一種無需任何學習參數的新型反演控制器,并避免了傳統反演控制的“微分項膨脹”問題。最后,仿真結果表明,所提方法可以保證跟蹤誤差良好的動態性能與穩態精度。
關鍵詞: ?乘波體飛行器;預設性能;新型性能函數;新型反演控制器;轉換誤差
中圖分類號: TJ765;V448? 文獻標識碼: A? 文章編號: ?1673-5048(2021)02-0011-10
0 引? 言
乘波體飛行器(Waverider Vehicle,WV)具有響應快速、機動性高、航程遠、突防能力強、探測與攔截難度大、殺傷力大等突出特點,且具備傳統航天飛行器所不具有的戰略、戰術與效費比等方面的突出優勢,已經成為世界各航空航天大國為爭奪空天權而爭先發展的方向[1-4]。
作為WV能夠安全、高效地執行和完成飛行任務的核心,控制系統設計目前屬于國際前沿熱點,國內外均有眾多學者和科研機構開展這方面的研究。WV構型特殊復雜,飛行環境未知因素多,導致為其建立的運動模型存在很大的非線性和不確定性。同時,WV的超機動飛行對其控制系統的動態性能也提出了極高的要求。因此,控制系統的魯棒性與動態性能也成為了關注熱點。文獻[5]基于反演控制設計結構,引入徑向基函數神經網絡對模型未知函數和不確定項進行逼近,實現了參數不確定情形下對WV參考指令的魯棒跟蹤,但沒有考慮神經網絡逼近誤差的影響。進一步,文獻[6]利用全局調節動態神經網絡進行在線逼近WV的未知模態,并引入魯棒項處理神經網絡估計誤差帶來的影響。文獻[5-6]雖能實現對WV參考指令的魯棒跟蹤控制,但是對控制系統的動態性能的約束效果不是很理想。為此,文獻[7]基于預設性能控制(Prescribed Performance Control,PPC)方法,通過設計性能函數對跟蹤誤差進行包絡約束,可以定量調節跟蹤誤差的收斂速度、超調量等動態性能指標,從而實現控制系統滿意的動態性能指標。文獻[8]提出一種新型魯棒預設性能控制器設計方法,能同時滿足高超聲速飛行器瞬態響應和穩態性能,通過設計一種新型時變對數型障礙Lyapunov函數,結合動態面法,保證了WV高度和速度子系統穩態跟蹤誤差精度和動態性能。
以上方法雖能較好地保證控制系統的魯棒性與動態性能指標,但是采用神經網絡逼近需要對其權值矩陣的元素進行在線學習,在線學習量大,控制實時性不高。現有的PPC性能函數形式過于復雜,設計參數較多,工程實用性不高。基于此,本文為WV設計了一種低復雜度預設性能反演控制方法。設計一種構型簡單的新型性能函數對跟蹤誤差進行約束,基于反演設計框架,采用轉換誤差設計控制器,避免了對虛擬控制律的求導計算。與傳統神經網絡控制方法相比,所提方法不需要任何在線學習參數,可以滿足控制算法良好的實時性。最后,通過仿真實驗驗證了控制策略的有效性和優越性。
1 問題描述
1.1 WV縱向運動模型
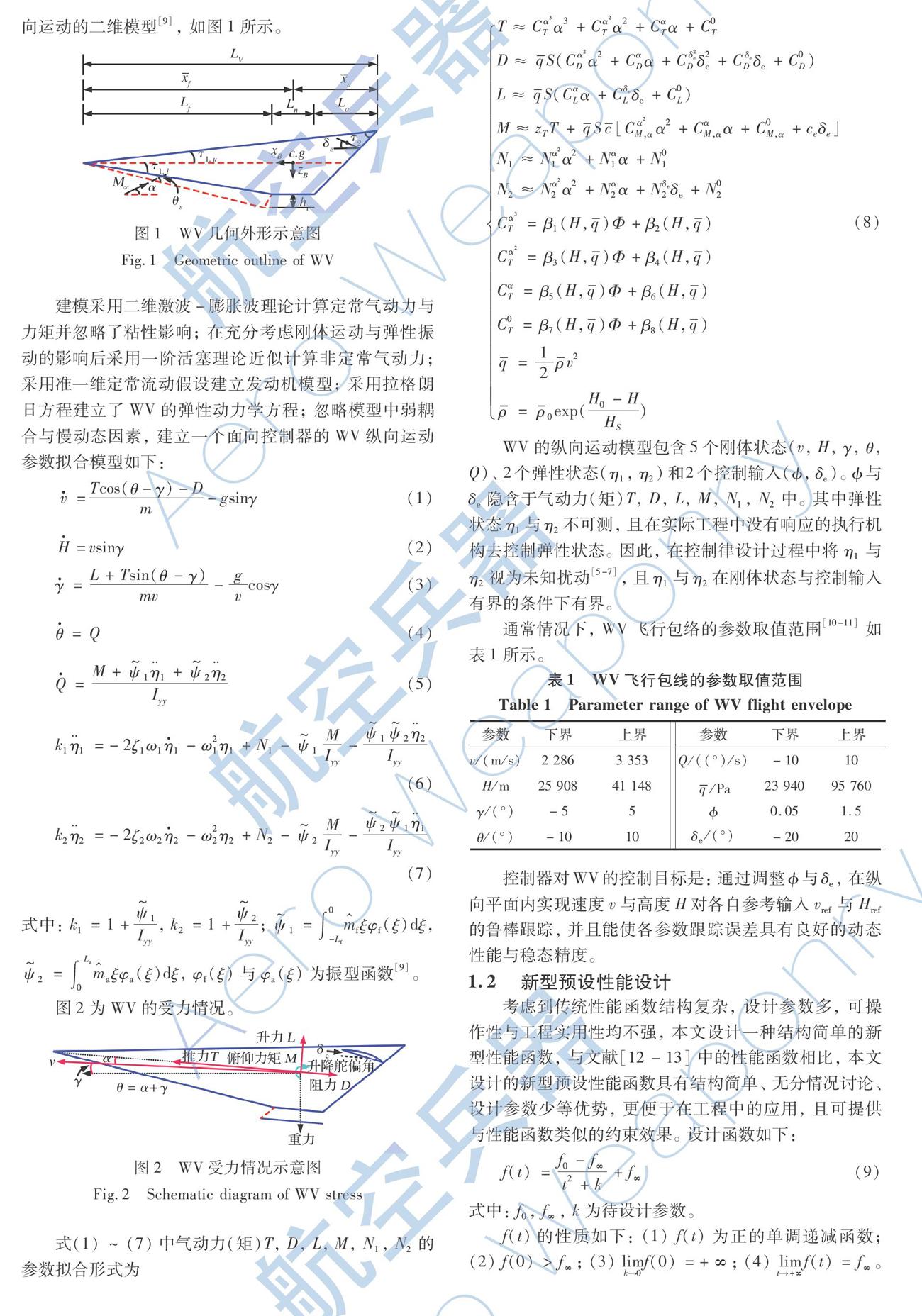
以NASA研制的X-43驗證機為對象,建立WV縱向運動的二維模型[9],如圖1所示。
建模采用二維激波-膨脹波理論計算定常氣動力與力矩并忽略了粘性影響;在充分考慮剛體運動與彈性振動的影響后采用一階活塞理論近似計算非定常氣動力;采用準一維定常流動假設建立發動機模型;采用拉格朗日方程建立了WV的彈性動力學方程;忽略模型中弱耦合與慢動態因素,建立一個面向控制器的WV縱向運動參數擬合模型如下:
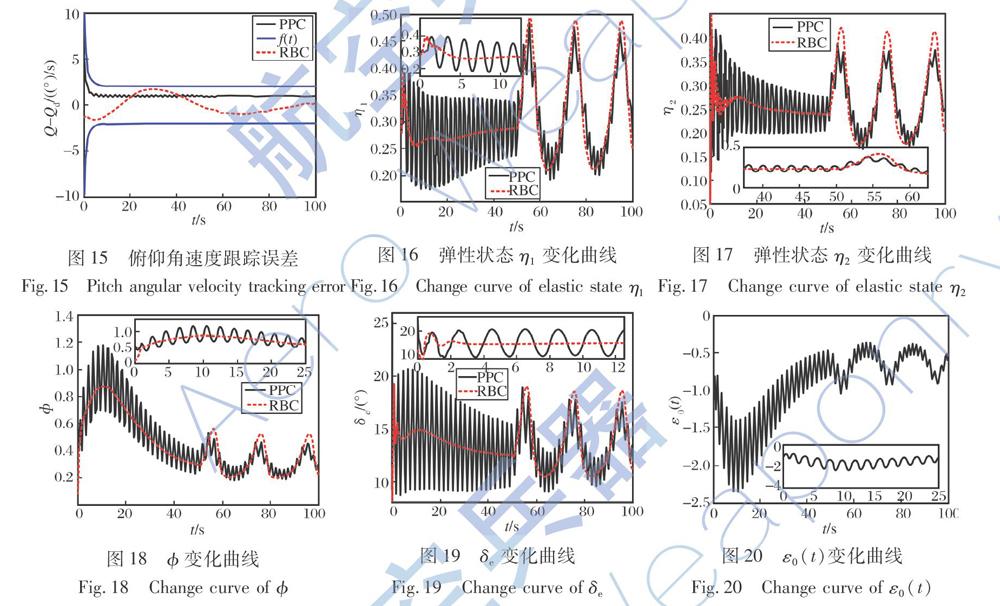
仿真結果如圖6~24所示,與文獻[17]的魯棒反演控制(Robust Back-Stepping Control,RBC)結果進行對比。
由圖6~9可見,采用PPC時的速度跟蹤誤差與高度跟蹤誤差均被限定在預設區域內;與RBC相比,PPC能使速度跟蹤誤差與高度跟蹤誤差具有更好的動態性能;當參數存在攝動時,PPC的控制精度也更高,表現出更強的魯棒性。 圖10~11表明,兩種控制方法的航跡角控制效果相當,但PPC的航跡角響應更平滑。圖12~15表明,雖然RBC的俯仰角與俯仰角速度響應更平滑,但采用PPC時,這兩個角度響應沒有高頻抖振現象,并且PPC能夠保證俯仰角跟蹤誤差與俯仰角速度跟蹤誤差具有更好的動態性能與穩態精度。由圖16~19可見,兩種控制
方法的彈性狀態與控制輸入均沒有高頻抖振現象。圖20~24表明,ε0(t),ε1(t),ε2(t),ε3(t),ε4(t)均有界。由圖7,9,11,13,15可見,所有跟蹤誤差均被限定在預設包絡內,使得跟蹤誤差不僅動態性能較好,穩態精度同樣較高,同時控制魯棒性也滿足要求。
4 結? 論
通過設計一種新型性能函數,使控制律擺脫了對跟蹤誤差精確初值的依賴,且能使所有跟蹤誤差具有良好的動態性能與穩態精度。所設計的控制律不含有任何自適應參數或學習參數,具有良好的實時性。同時性能函數構型簡單,無需對虛擬控制律求導,避免了微分項膨脹。仿真結果表明,所提方法能夠將跟蹤誤差約束在預設的包絡內,以便于保證跟蹤誤差滿意的動態性能與穩態性能。
參考文獻:
[1] 梁曉庚,田宏亮. 臨近空間高超聲速飛行器發展現狀及其防御問題分析[J]. 航空兵器,2016(4): 3-10.
Liang Xiaogeng,Tian Hongliang. Analysis of the Development Status and the Defense Problem of Near Space Hypersonic Vehicle[J]. Aero Weaponry,2016(4): 3-10.(in Chinese)
[2] 卜祥偉. 高超聲速飛行器控制研究進展[J]. 航空兵器,2018(1): 47-61.
Bu Xiangwei. Progress on Flight Control of Hypersonic Flight Vehicles[J]. Aero Weaponry,2018(1): 47-61.(in Chinese)
[3] 王鵬飛,王潔,時建明,等. 吸氣式高超聲速飛行器控制研究綜述[J]. 航空兵器,2015(3): 3-7.
Wang Pengfei,Wang Jie,Shi Jianming,et al. Research Progress on Control System of Air-Breathing Hypersonic Flight Vehicles[J]. Aero Weaponry,2015(3): 3-7.(in Chinese)
[4] 賈二勇,袁濤,王鵬飛,等. 吸氣式高超聲速飛行器反演自適應控制[J]. 航空兵器,2017(4): 14-20.
Jia Eryong,Yuan Tao,Wang Pengfei,et al. Adaptive Back-Stepping Controller Design for Air-Breathing Hypersonic Vehicle[J]. Aero Weaponry,2017(4): 14-20.(in Chinese)
[5] 李小兵,趙思源,卜祥偉,等. 高超聲速飛行器預設性能反演控制方法設計[J]. 北京航空航天大學學報,2019,45(4): 650-661.
Li Xiaobing,Zhao Siyuan,Bu Xiangwei,et al. Design of Prescribed Performance Backstepping Control Method for Hypersonic Flight Vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics,2019,45(4): 650-661.(in Chinese)
[6] 趙賀偉,胡云安,楊秀霞,等. 考慮彈性振動的高超聲速飛行器預設性能控制[J]. 振動與沖擊,2017,36(7): 241-247.
Zhao Hewei,Hu Yunan,Yang Xiuxia,et al. Prescribed Performance Control for a Hypersonic Vehicle Considering Elastic Vibration[J]. Journal of Vibration and Shock,2017,36(7): 241-247.(in Chinese)
[7] 王鵬飛,羅暢,劉承君,等.吸氣式高超聲速飛行器預設反演魯棒控制[J].彈箭與制導學報,2021(1): 124-129.
Wang Pengfei,Luo Chang,Liu Chengjun,et al. Back-Stepping Robust Control for Air-Breathing Hypersonic Vehicle with Prescribed Performance[J]. Journal of Projectiles,Rockets,Missiles,and Guidance,2021(1): 124-129. (in Chinese)
[8] 馮振欣,郭建國,周軍. 高超聲速飛行器新型預設性能控制器設計[J]. 宇航學報,2018,39(6): 656-663.
Feng Zhenxin,Guo Jianguo,Zhou Jun. Novel Prescribed Performance Controller Design for a Hypersonic Vehicle[J]. Journal of Astronautics,2018,39(6): 656-663.(in Chinese)
[9] Bolender M A,Doman D B. Nonlinear Longitudinal Dynamical Model of an Air-Breathing Hypersonic Vehicle[J]. Journal of Spacecraft and Rockets,2007,44(2): 374-387.
[10] Parker J T,Serrani A,Yurkovich S,et al. Control-Oriented Modeling of an Air-Breathing Hypersonic Vehicle[J]. Journal of Guidance,Control,and Dynamics,2007,30(3): 856-869.
[11] Fiorentini L. Nolinear Adaptive Controller Design for Air-Breathing Hypersonic Vechicles[D]. Columbus: The Ohio State University,2010.
[12] Bolender M A,Doman D B. Nonlinear Longitudinal Dynamical Model of an Air-Breathing Hypersonic Vehicle[J]. Journal of Spacecraft and Rockets,2007,44(2): 374-387.
[13] Parker J T,Serrani A,Yurkovich S,et al. Control-Oriented Modeling of an Air-Breathing Hypersonic Vehicle[J]. Journal of Guidance,Control,and Dynamics,2007,30(3): 856-869.
[14] 胡云安,耿寶亮,蓋俊峰. 初始誤差未知的不確定系統預設性能反演控制[J]. 華中科技大學學報: 自然科學版,2014,42(8): 43-47.
Hu Yunan,Geng Baoliang,Gai Junfeng.? Prescribed Performance Backstepping Control for Uncertain Systems with Unknown Initial Errors[J]. Journal of Huazhong University of Science and Technology: Natural Science Edition,2014,42(8): 43-47.(in Chinese)
[15] 卜祥偉,吳曉燕,白瑞陽,等. 基于滑模微分器的吸氣式高超聲速飛行器魯棒反演控制[J]. 固體火箭技術,2015,38(1): 12-17.
Bu Xiangwei,Wu Xiaoyan,Bai Ruiyang,et al. Sliding-Mode-Differentiator-Based Robust Backstepping Control of Air-Breathing Hypersonic Vehicles[J]. Journal of Solid Rocket Technology,2015,38(1): 12-17.(in Chinese)
[16] 李小兵,趙思源,卜祥偉,等. 高超聲速飛行器非仿射模型的預設性能反演控制[J]. 控制理論與應用,2019,36(10): 1672-1681.
Li Xiaobing,Zhao Siyuan,Bu Xiangwei,et al. Prescribed Performance Control Method for Non-Affine Model of Hypersonic Vehicles[J]. Control Theory & Applications,2019,36(10): 1672-1681.(in Chinese)
[17] Bu X W,Wu X Y,Zhang R,et al. Tracking Differentiator Design for the Robust Backstepping Control of a Flexible Air-Breathing Hypersonic Vehicle[J]. Journal of the Franklin Institute,2015,352(4): 1739-1765.
Low Complexity Prescribed Performance Back-Stepping
Control of Waverider Vehicle
Jiang Baoxu1,Bu Xiangwei2*,Qi Qiang1
(1. College of Graduate,Air Force Engineering University,Xian 710051,China;
2. Air and Missile Defense College,Air Force Engineering University,Xian 710051,China)
Abstract: In view of the complex structure of neural network prescribed performance control method and low control real-time performance,a low-complexity prescribed performance inversion control method is proposed for waverider vehicle(WV). Firstly,a new type of performance function with simple form and independent of initial error is designed to envelop the tracking error. Secondly,using a conversion strategy,the inequality constraint on the tracking error is equivalently converted into an equality constraint by introducing a conversion error. Then,based on the conversion error,a new type of inversion controller without any learning parameters is designed for WV,and it avoids the “differential term expansion” problem of traditional back-stepping control. Finally,the simulation results show that the proposed method is expected to guarantee good dynamic performance and steady-state accuracy of tracking error.
Key words: waverider vehicle;prescribed performance;new performance function;new back-stepping controller;conversion error
收稿日期:2021-04-23
基金項目:中國科協青年人才托舉工程項目(18-JCJQ-QT-007)
作者簡介:姜寶續(1998-),男,遼寧大連人,碩士,研究方向為飛行器控制技術。
通訊作者:卜祥偉(1987-),男,河南夏邑人,副教授,博士,研究方向為飛行器先進控制技術。
