深度學習算法下的遙感影像目標識別研究
2021-08-04 05:11:12方磊
經緯天地 2021年2期
方 磊
(廣東省地質測繪院,廣東 廣州 510800)
0.引言
在人工智能技術發展中,深度學習算法的應用越來越廣泛。遙感影像數據所具備的特點主要為海量、多維以及多樣等,在這一數據處理中,深度學習算法具有天然優勢,可以實現對復雜對象抽象特征的自動及多層次提取,進而實現在海量數據中得到地物目標的高層語義特征,顯著提升遙感影像目標特征提取的精度[1,2],目前,深度學習方法已經廣泛應用在圖像識別處理中,并取得了較好的效果,因此可將該方法推廣在遙感影像目標識別中應用,所以需在深度學習算法的應用下實現對遙感影像目標的識別,不但可以顯著提升遙感影像圖像識別精度,同時也可以有效滿足現代高效快速以及自動化檢測的實際需求,為遙感影像目標識別提供新的智能化及自動化方法。
1.深度學習算法下的遙感影像圖像識別
1.1 深度學習下的目標檢測算法
深度學習屬于是機器學習方法之一,傳統方法中具有較高的先驗知識要求,另外,也存在有模型泛化能力不足等[3]。深度學習算法下的遙感影像目標識別方法在應用中,針對感興趣區域可以通過滑動窗口提取,且在網絡提取特征的應用下實現目標檢測,因此在實際中得到了廣泛應用。
1.2 目標檢測模型的選擇及優化
卷積神經網絡在目標檢測中也有所應用,作為人工神經網絡之一,建立在多層監督學習基礎上,存在有良好容錯性以及自適應性,能夠實現權值共享等,因此在圖像識別、語義分割以及物體檢測等方面均得到了廣泛應用。當前卷積神經網絡中的檢測框架有Faster R-CNN、RFCN、SSD,在以上3種檢測中,Faster R-CNN的精度最高,但是相對來講效率最低;Inception Resnet的網絡復雜度最高,與之相應的有助于顯著提升精度。在訓練中,要加強對訓練情況觀察和分析,進而實現對batch和學習率的優化,以能夠進一步降低隨機梯度,且對其實施持續性收斂。在此基礎上,結合遙感影像數據目標檢測模型實際需求,實現對訓練參數的合理選擇。在數據增強操作的應用下,進一步提升訓練樣本的多樣性,為能夠防范因為樣本數量不足,引發出現過擬合,在分析過程中也需要提升模型的魯棒性。在強化遙感影像數據中,所采用的方法主要為5種,分別為圖像亮度、飽和度以及色調變換;裁切操作圖像;圖像旋轉及傾斜;圖像去冗余;提升高斯噪聲。
SSD算法屬于是目標檢測算法之一,在當前應用較為廣泛,Fater R-CNN算法相比,這一算法具有較快檢測速度;和YOLO算法相比,這一算法的檢測精度比較高。這一算法是基于VGG-16基礎上,設置輔助卷積、池化層等結構,獲取的多尺度特征圖可以實現對目標檢測,較大特征圖能夠實現對相對較小目標檢測,較小特征圖主要是用來實施大目標檢測。SSD算法是基于YOLO算法上的一體化檢測方法,然而與之有所差異,YOLO算法實施的是全連接層預測,SSD算法是在卷積下檢測分析不同尺度特征圖,另外,在參考Fater R-CNN中anchor的基礎上,針對目標預測可以實現對目標框的偏差計算,基于此有助于顯著降低訓練難度。SSD算法在預測中采用的是多尺度預測,然而不同尺度特征之間具有獨立性,特征位置越低信息質量越好,相對分類精度偏差。這一算法是基于VGG-16網絡中偏后的cinv4_3卷積層,其實現對多尺度特征圖的建構,在小目標檢測中相對性能較差。另外,SSD算法檢測過程中的輸入圖像尺寸偏小,通常為300pixel×300 pixel,雖然小尺寸圖像有助于提高目標檢測速度,然而在遙感圖像自動化檢測任務中,如果是檢測圖像固定至小尺寸圖像,容易丟失目標特征信息。為能夠取得良好的檢測性能,則需要針對SSD算法實施改進。
1.3 大范圍下的目標檢測
在大范圍內針對相關目標實施檢測和識別中,可以在格網方式的應用下實現對目標區域的劃分,將其分割成多個小區域,之后針對各個小區域實施循環加載,以此即可以針對目標實施檢測。在大范圍影像數據分析過程中,想要確保所有目標均被檢測,需確保小區域中的長寬比例與客戶端長短比例相同。大范圍目標檢測劃分網格中,可能會導致在多個小區域中存在有影像的單個小目標,在這一情況下實施檢測容易發生遺漏。所以網絡劃分中需要確保相鄰網格具有一定的重疊率。首先,在系統中將所需檢測及識別目標范圍繪制出來,結合目標大小實現對影像目標的合理縮放,確保檢測圖像可以達到一定的級別規模。之后結合地圖容器大小實現對大區域的網格動態劃分。最后,針對各個網格,可以在系統下循環調用單張圖像,進而對實現目標檢測操作[4]。在這一過程中,提升重疊有助于提高格網總數量,對于數據處理量有提升作用,對于檢測效率具有不良影響。所以重疊率設置過程中一定要結合實際需求。在設置重疊率的時候,其中部分影像在檢測中可能會被重復,檢測后也需要實施檢測結果的空間分析,將重復檢測的目標全部刪除,系統運行過程中以上操作可以實現半自動化處理,例如,針對系統中要素重疊實施分析中,如果分析的要素類型以及位置相同,即為重疊要素可自動標注,這一類要素通常為同一目標,還需要實施一定的人工干預,以能夠確保將重疊檢測內容均刪除。
2.實驗分析
2.1 實驗數據
本次實驗過程中,針對目標檢測及識別,選擇的數據集分別為:ImageNet數據集,在這一數據集中存在140萬張標記圖片,圖片類型大小不一,類型也比較多。基于這一數據集實施目標識別的模型預訓練,不但可以提高模型的泛化能力,在分析過程中也可以提高遷移速度;DOTA數據集,其中,包括有2806張航空影像,拍攝方法主要為Google Earth遙感、JL-1衛星以及JL-2衛星,影像幅度都非常大,大概為800×800~4000×4000,圖像中的物體主要為大型場地及可移動物體。因為這些圖像在拍攝中的高度比較高,因此圖片中出現的可移動物體均屬于是中小目標。
因此本次所選取的兩個數據集,圖像原始尺寸存在差異,針對原始數據先要進行尺寸統一,裁剪處理為512×512圖像,隨后數據增強處理過程中,采用的方法為隨機擾動、隨機縮放等。數據集在訓練過程中主要為訓練集及測試集,在這一過程中前者數據量和后者相比之間的比例為9∶1。
2.2 實驗設計
2.2.1 實驗環境
本次實驗分析中,環境設置詳情(如表1所示):

表1 環境設置
2.2.2 精度評定方法
針對本次實驗訓練中的目標檢測模型,采用平均精度(average_precision,AP)實施評估,計算方法如式(1)所示:

式(1)中的AP為P-R曲線和坐標軸所共同圍合形成區域的面積;P為訓練精準率;R為訓練召回率,計算過程如式(2)、式(3)所示:

式(2)、式(3)中,TP、FP分別為正確和錯誤識別標簽目標數量,式(3)中的FN為錯誤識別非標簽目標數量。
2.2.3 速度評定方法
在每秒幀速(Frame Per Second,FPS)方法的應用下實現速度評定,即為每秒鐘的影像處理數量,在評定中FPS值越大即為影像處理速度越快。相應的計算方法如式(4)所示:

式(4)中,F為影像處理數量;S為影像處理時間;單位為s。
2.2.4 超參數評定
本次實驗研究中的學習率策略為Warm Up,在初始設置中,學習率為0.01、epoch為400以及batchsize為2。
2.3 算法改進應用
2.3.1 模型與訓練及遷移學習
在卷積神經網絡的應用下,實現對特征的分層提取,其中,在遷移學習方法的應用下實現特征提取網絡預訓練,這一方法有助于減少訓練時間。首先針對ImageNet數據集實施與訓練,所得到的預訓練基礎網絡,圖像特征提取能力比較強,之后將其在整體目標檢測結構中嵌入,且將其作為是遷移訓練的初始模型參數,在分析過程中DOTA數據集迭代回歸Δcx、Δcy、Δw以及Δh參數變量,在影像圖像分析中實現目標檢測及識別。
遷移訓練中損失函數分別為位置損失函數Lloc,即為精確定位想要檢測的目標;置信度損失Lconf,即為判定預測框分類概率。以上兩者加權平均和即為代價函,相應的計算公式如式(5)所示:

式(5)中,N為正樣本數量;λ為權重,如果在這一分析過程中N為0,即可以得到損失為0,另外在公式中c為默認框標簽,如果針對數據匹配中第i個默認框實現和j個標簽框的匹配,所得結果即為xij=1,反之即為0。其中,定位損失Lloc在計算過程中,即為L1平滑損失,相應的計算公式如式(6)所示:
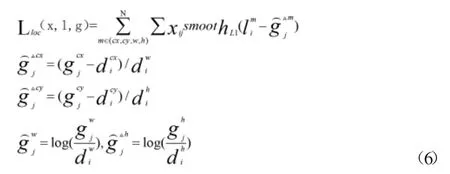
式(6)中,g為真實標簽框;l為預測礦;d為默認框,w及h為矩形框寬高;(cx,cy)分別為矩形框中心點坐標;剩余指標為參數偏移量。在多個不同置信度下的softmax損失即為置信度損失,表示為Lconf;c為某種一個類別目標及非目標的、置信度,相應的計算公式如式(7)所示:

2.3.2 修改SSD網絡架構
SSD網絡架構過程中,也就是在提取不同尺度特征后,針對所得特征實施分類回歸,在此過程中也就可以實現檢測范圍內的不同目標識別。原始SSD網絡架構是基于VGG-16基礎網絡,在將其全連接層截斷后,還需要繼續在這一條件下 添 加Conv6、Conv7、Conv8_2、Conv9_2、Conv10_2以 及Conv11_2卷積層,在卷積神經網絡應用下實現對特征提取。在此過程中檢測層即為以上提出卷積層,因此在遙感影像檢測中,受到較多層級卷積結構的影響,部分小目標占比比較小,在此目標檢測中容易出現部分特征信息流失,所以要改進原始SSD目標檢測網絡,并不能夠只是將Conv4_3作為檢測層,改進后新增Conv3_2作為檢測層,有助于提升系統的檢測能力[5,6]。其中改進后網絡架構(如圖1所示):
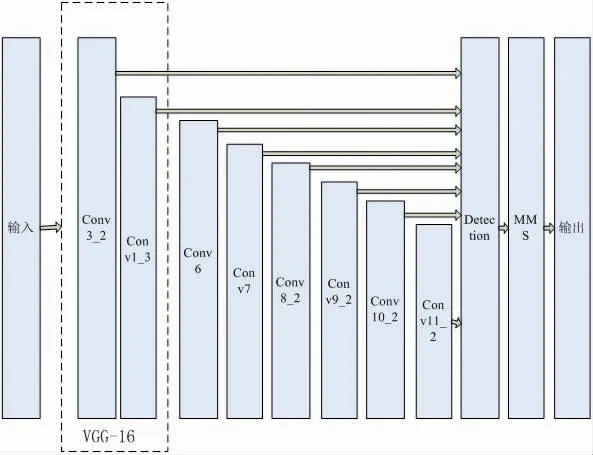
圖1 改進后SSD網絡架構
2.4 結果分析
本次實驗為兩組數據檢測,A為原始SSD算法,B組為改進SSD算法,在對DOTA數據集實施檢測發現:A組檢測結果為AP=7.06×10-1,B組檢測結果為AP=7.53×10-1。通過這一研究結果可以看出,B組算法得到了更好的訓練效果,由此可見,卷積神經網絡針對圖像特征實施逐層提取效果顯著,也驗證了遷移學習具有重要應用價值。
其中,改進后SSD算法在DOTA數據集上的檢測結果(如圖2所示):基于此能夠發現在此應用中可以實現對飛機、船舶等小目標的識別,具有一定檢測精度。但是飛機目標檢測精度和船舶目標相比明顯偏高,因為船舶目標和背景有所類似,所以檢測難度大。

圖2 改進SSD算法檢測結果
3.結束語
本次研究得出以下2點結論:
(1)針對原始SSD算法實施模型預訓練,逐層提取圖像特征,且對其實施遷移訓練,有助于提升檢測精度及檢測速度;
(2)針對原始SSD算法實施改進,可以實現對遙感影像中小目標的識別,檢測精度明顯高于原始SSD算法。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54