收獲機與運糧車縱向相對位置位速耦合協同控制方法與試驗
2021-08-04 05:45:52張聞宇張智剛羅錫文岳斌斌
農業工程學報 2021年9期
張聞宇,張智剛,羅錫文,何 杰,胡 煉,岳斌斌
(華南農業大學南方農業機械與裝備關鍵技術教育部重點實驗室,廣州 510642)
0 引言
為緩解農業勞動力短缺,降低農業勞動強度,全過程、全天候的無人化農場將成為未來農業的重要發展方向[1]。農業裝備智能導航控制技術是無人農場的關鍵之一[2-6],近年來研究者針對旱田[7-10]、水田[11-12]、魚塘[13]等農業裝備的智能控制技術進行了大量研究,同時研究了衛星[14-17]、激光雷達[18-19]或視覺[20-22]定位導航方法,取得良好的控制效果,但多數研究主要針對單機的自主控制。在無人農場收獲環節中,由于收獲機糧倉有限,需要收獲機與運糧車的協同配合。其中將收獲機的糧食轉運到運糧車需要實現精準自主卸糧,研究收獲機和運糧車相對位置協同控制方法對于實現無人農場全程自主收獲具有重要意義。
國內外研究者對相對位置協同控制方法進行了相關研究。日本的Noguchi等[23]設計了基于Follow algorithm和滑模變控制方法的主從農機協同作業控制方法,速度設置在0.5~1.5 m/s之間,仿真試驗結果表明雙機協同的相對位置均方根誤差為0.106 m。Zhang等[24]出于安全考慮設計了主從協同的控制算法,該算法包含狀態反饋和擾動前饋的PD控制邏輯,構建了主從農機導航系統,田間協同導航試驗結果表明,從機路徑跟蹤誤差大多數時間在0.1 m以內。Zhang等[25]針對田間協同作業導航性對位置誤差控制,設計了PD控制器,速度為0.83 m/s時,協同導航試驗表明兩機的相對位置平均偏差為0.13 m,方差為0.15 m。Luo等[26]在兩輛電動機器人上驗證了相對位置協同控制方法,主機速度為0.3 m/s,初始偏差為0.2 m時,相對位置平均誤差為0.01 m,方差為0.03 m。白曉平等[27]針對聯合收獲機群協同導航作業提出一種基于領航-跟隨結構的收獲機群協同導航控制方法,用于控制路徑跟蹤橫向偏差。許韶麟[28]采用預測模型方法實現了4架電動機器人的協同編隊功能,停止后采用卷尺測量,誤差不超過5 cm。鄒存名等[29]基于線性矩陣不等式的模型預測控制器設計了電動機器人車隊協同方法,基于Arduino控制單元搭建試驗車隊驗證了算法的有效性和實用性。
上述研究針對多機器人相對位置協同問題提出了多種控制方法,多數研究以小型機器人為對象,控制對象的線性度較高,但控制方法的速度適應范圍不能滿足收獲協同卸糧作業需求。本文擬針對自主收獲精準協同卸糧作業的需求,分析縱向相對位置協同原理;建立相對位置幾何模型;設計位速耦合縱向相對位置協同控制方法和辨識車速系統模型,建立仿真模型進行參數優化和對比試驗研究;通過田間空載試驗和實際收獲協同卸糧試驗,驗證控制方法的性能和適應性。
1 雙機縱向相對位置協同原理
自主收獲精準協同卸糧的作業狀態如圖1所示,其中收獲機和運糧車平行行駛。為了精準卸糧,需要同時控制收獲機Ph坐標(xh,yh)和運糧車Pt坐標(xt,yt),使卸糧筒出口Pu與卸糧目標點Pb重合。Pu與Pb的相對橫向距離dp通過調節兩車的直線跟蹤路徑距離來控制。相對縱向距離dp通過調節運糧車的車速來控制。
分析協同作業時雙機的幾何關系(圖1b),設置基準線為過運糧車定位點的運糧車行駛方向直線,dp為目標卸糧點Pb與卸糧口Pu在基準線上的投影距離,幾何模型如式(1)所示:
使用上述模型時由于收獲機、運糧車和拖斗的航向存在高頻擺動,全部引入模型,容易引起控制振蕩,根據前期試驗,雙機在直線導航跟蹤過程,車輛和拖車航向擺動的標準差小于0.06°,且變化分布類似白噪聲,所以將α和β設為0。據此可以將上述模型簡化為平行協同模型,如圖1c所示。假定雙機在跟蹤平行路徑時,航向穩定且與目標直線相同,拖斗也與拖拉機位于同一直線上。這一假設能夠降低模型復雜度,同時提高控制目標的穩定性,排除航向波動引起的高頻干擾。由于簡化模型中拖車、拖斗和收獲機航向相同,所以可以對進行Pb平移,向前平移la的距離,使得le=lb+lc-la,le為Pb到Pt的距離,通過Ph的投影計算dp,計算方程為
2 縱向相對距離協同控制框架
收獲機與運糧車分別規劃行駛路徑,雙機協同目標路徑平行,通過設定目標路徑間距來調整兩車橫向相對距離,由于所采用的直線跟蹤方法精度為2.5 cm[19],所以雙機協同橫向相對距離控制精度能達到5 cm。本文主要研究縱向相對位置偏差控制方法,通過改變運糧車油門大小進行調節。
縱向相對位置控制框架如圖2所示,收獲機為主機,運糧拖拉機為從機。對主機和從機的位置和速度進行差分,獲得主從機的相對位置和速度,輸入至位速耦合控制器得到期望發動機轉速。將期望值通過CAN總線輸入到發動機電子控制器(Electronic Control Unit,ECU),從而改變從機前進速度,實現縱向相對位置控制。
3 位速耦合控制器設計
控制兩車的相對位置需要對位置和速度進行耦合控制,依據當前的位置和速度差改變油門控制的策略。
本文將位速控制分為2個分量,一個為速度一致性決策分量,另一個為位速綜合決策分量,速度一致性決策分量upd與位速綜合決策分量ubang-bang加權求和得到位速耦合控制器輸出uo,uo為發動機轉速變化率,控制器結構簡圖如圖3所示。
式中bbang-bang為求和權重,通過仿真優化整定。
由于兩車在協同行駛過程中,油門與速度系統具有較高的延時和非線性特點,所以在控制的過程中設置死區以提高穩定性,縱向偏差處于死區范圍內時速度需要保持相對穩定。如果僅使用相對位置PD控制,易出現超調和振蕩現象。速度偏差是位置偏差的微分,引入速度一致性決策分量,可提高控制系統阻尼,消減振蕩。
速度一致性決策分量為PD控制。主要作用是協調兩車速度,在位速綜合決策分量死區范圍內僅依靠該決策分量進行控制:
位速綜合決策分量通過基于動力學原理的Bang-Bang控制模型計算,假設拖拉機在僅控制油門的情況下,最大合力為Fmax,最大加速度為amax,當前縱向速度偏差為ev時,依據能量守恒方程Fmaxd=1/2mev2,以最大加速度amax改變車速使得ev減小為0時,運糧車與收獲機的相對行駛距離d為
式(4)~(5)中m為車體質量,kg;kp為比例增益系數,t為時間,s。
依據上式知當縱向相對位置偏差ed和速度偏差ev的數學關系為式(5)時,執行加速度為amax的減速,即可使縱向偏差ed和速度偏差ev同時收斂至0。據此可以設計控制滑模開關函數f(ev),通過該函數判斷兩車的當前狀態,并改變控制策略,具體設計如下:
車輛通過油門大小實現加速或減速功能,不涉及換擋或者剎車,加減油門的最大變化率基本相同,所以最大加速度amax和減速度-amax的數值相近。依據述能量守恒原理,結合公式(5)設計滑模開關函數ed=k1ev2、ed=k2ev2、ed=-k1ev2和ed=-k2ev2,其中k1和k2為接近的值,針對滑模面控制抖振問題,設置這2組滑模開關函數構建死區消除抖振。位置閾值ed=(-0.25, 0.25)是距離精度死區,ed=(-0.8,-0.25]和ed=[0.25,0.8)是分段控制范圍,大于該距離分為一段,速度閾值ev=(-0.06,0.06)是速度精度死區,ev=(-0.1,-0.06]和ev=[0.06,0.1)是分段控制范圍,大于該速度范圍分為一段,綜合上述閾值設計位速綜合決策方法,如圖4所示。
位速綜合決策方法依據兩車相對位置偏差ed和相對速度偏差ev值將狀態分組如下:
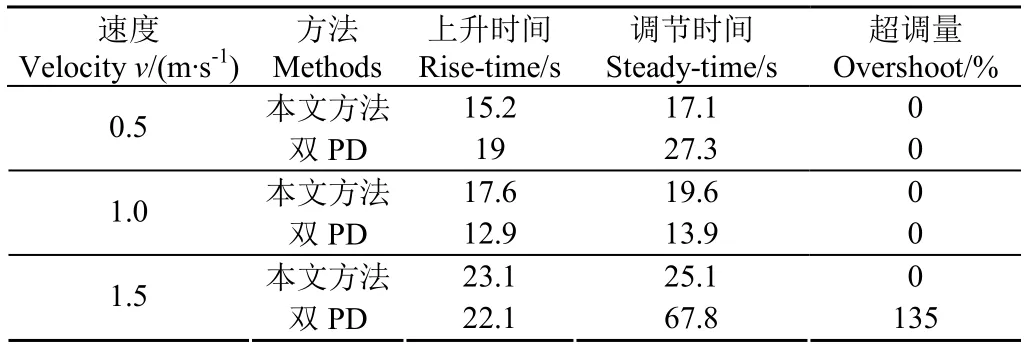
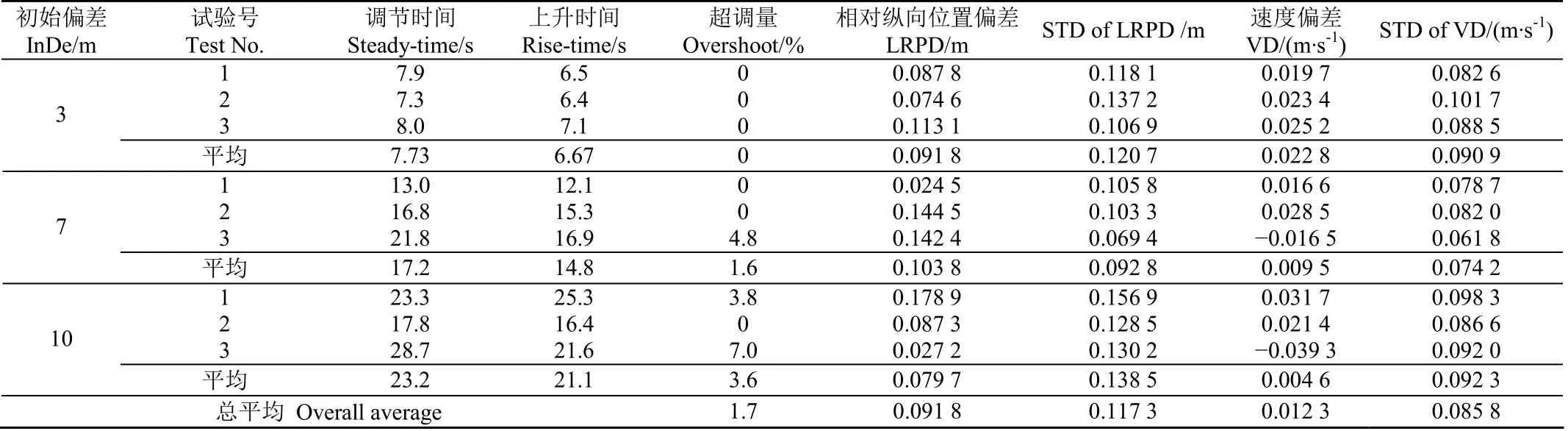
A:{-0.25 B:{-0.25 C:B關于y軸的對稱區域,輸出分量為-a1; D:{-0.25 E:D關于y軸的對稱區域,輸出分量為-a2; F:{0.25≤ed<0.8,ed>k1ev2}的非閉合區域,輸出分量為a3; H:F關于原點的對稱區域,輸出分量為-a3; I:{-0.8 J:I關于原點的對稱區域,輸出分量為-a4; K:{ed≤-0.8,ed>-k2ev2}的非閉合區域,輸出分量為a5; L:K關于原點的對稱區域,輸出分量為-a5; M:{ed≥0.8,ed>k1ev2}的非閉合區域,輸出分量為a6; N:M關于原點的對稱區域,輸出分量為-a6。 建立縱向相對位置控制系統仿真模型,用于控制器設計、控制參數優化和控制性能研究。 建立縱向相對位置控制系統仿真模型需要獲得運糧車油門與行駛速度的傳遞函數模型。但通過發動機轉動模型、變速箱傳動模型和輪胎摩擦驅動模型正向推導運糧車油門與行駛速度的傳遞函數模型難度較大,模型中部分參數未知,無法拆分各部分進行參數整定。所以本文采用階躍響應面積辨識法獲取系統傳遞函數[16]。 進行了階躍響應試驗,將期望轉速從1 000階躍為1 400,通過BDS(BeiDou system)系統測量獲得拖拉機速度上升了0.3 m/s,記錄速度變化曲線,采樣率為10 Hz,對數據進行歸一化處理,再通過面積辨識方法,計算獲得二階傳遞函數如式(6)所示。試驗數據與辨識模型階躍響應G(s)如圖5所示,該辨識模型的R2為0.988 1,滿足建立仿真模型的要求。 式中s為復參數。 仿真模型輸入包括主機的前進速度、初始縱向相對位置和初始從機行駛速度。將縱向相對位置偏差和相對速度輸入位速耦合控制器,計算出發動機轉速變化率,由轉速變化率積分獲得當前發動機轉速。通過基于面積辨識所獲得的傳遞函數計算出從機車速,該車速與主機車速差為相對速度。相對速度的積分與初始縱向相對位置的和為當前相對位置。依據拖拉機發動機轉速可調節的最大和最小速度,對仿真速度進行限幅,速度限幅范圍為0.3~2.0 m/s;針對發動機轉速變化率進行限幅,變化率限幅范圍為-300~600 r/s。縱向相對位置控制Simulink仿真模型如圖6所示。 為驗證仿真模型是否符合實際情況,在雷沃阿波斯智慧農業示范基地的試驗田進行仿真模型驗證試驗: 1)設計收獲機與運糧車協同試驗,根據收獲機常規收獲速度,設置主機速度為1 m/s。根據所設計位速耦合控制算法,可知縱向相對位置偏差大于8 m時,控制器計算輸出已經大于最大油門變化值,而被限幅,運糧車將開最大油門前進,再設置更大初始偏差,收斂過程相似。所以設置初始相對偏差為8 m具有一定的代表性; 2)通過BDS-GNSS雙天線系統采集車輛速度,RTK-GNSS定位模塊(司南公司的K728),定位信息獲取頻率為10 Hz,水平定位精度±(10+D×10-6)mm,D為基站到移動站的距離,km; 3)設置相同的初始條件,將所得結果與仿真模型的結果進行對比,結果如圖7所示(圖中的實際數據的毛刺來源于其他數據對通訊信道占用導致的處理延時)。仿真系統與實際系統的調節時間相差2.1 s,上升時間相差1.3 s,穩態偏差相差0.19 m,所構建仿真系統滿足仿真分析要求。 位速耦合控制器中的關鍵參數包括2個分控制器的系數kp、kd、bbang-bang、a1、a2等。根據前期試驗[30]可知將拖拉機發動機轉速變化率控制在300 r/s以內控制過程中沒有明顯的頓挫現象。以上述變化率改變油門大小,最大轉速變化率為5.0 r/s,預設a1至a6參數分別為1.5、2.5、3.0、0.5、2.5和5.0 r/s。基于初步測試結果,參數的優化組kp設置為0.025~0.75之間的30等分組,kd設置為1.5~4.0的6等分組,bbang-bang設置為0.1~1.0的10個等分組。主機速度設置為1 m/s,相距距離為8 m,用這30×10×6組參數進行全因子試驗獲得縱向控制響應數據。性能指標綜合時間絕對誤差(Integral Time Absolute Error,ITAE)[31]重點關注動態性能,加入隨機噪聲后的穩態性能對該指標的影響較低。本文希望能兼顧縱向相對位置協同控制的動態性能和穩態性能,根據文獻[32],系統時域響應的性能指標包括上升時間tr、調節時間ts、穩態偏差e、標準差σ和超調量Mp。設計本文的參數優化性能指標J如式(7),綜合考慮階躍響應性能指標的物理實際意義,各項指標的優化方向都是降低數值,加權求和能夠代表動態和穩態性能。 由于各項階躍響應性能指標的數值范圍存在差距,直接求和會使數值較大的指標削減數值較小指標的影響,所以本文將正常收斂過程中的幾個指標數值調整到基本相同的范圍內,使所設計的指標能夠兼顧動態性能和穩態性能,仿真試驗中穩態偏差、標準差控制目標在0.2 m左右,所以穩態指標權重bj2設為15,超調量單位為%,控制目標在4%即0.3 m以內,所以超調量指標權重bj3設為100%,仿真時間設為35 s,分析得出的上升時間與調整時間在0~35 s,所以時間權重bj1設為1/35。采用該性能指標篩選出適合縱向相對位置協同控制的參數,分析參數適應性,剔除極端參數。 通過全因子試驗獲得參數響應曲面,對響應數據進行對數處理,將指標調整到適當的大小,同時保留指標的相對關系: 為了提高優化結果的泛化能力和魯棒性,使用二維卷積核式(9)對響應曲面進行特征提取,獲得處理后的參數性能響應曲面如圖8所示。 由圖8可知,最優性能指標出現在kd=3.0時,此時kp、kd和bbang-bang分別為0.2、3和0.8。 依據上述優化方法對速度0.5、1.0和1.5 m/s進行參數尋優,結果如表1所示。由于該方法基于動力學原理設計,參數響應曲面平緩,最優參數速度適應性較好。 表1 位速耦合控制參數優化結果 Table 1 Position-velocity coupling control parameter optimization results 由于實際協同過程中可能存在干擾導致控制超調,運糧車超車至收獲機前方,相對位置偏差為負。為驗證最優參數在初始偏差為負值時的控制效果設計驗證試驗,仿真模型同上文,初始偏差為-8 m,3組試驗主機速度分別設為0.5、1.0和1.5 m/s。響應曲線如圖9所示。平均穩態偏差絕對值分別為0.027 5、-0.068 9和0.056 0 m;穩態標準差分別為0.034 9、0.026 9和0.026 3 m;上升時間分別為14.7,12.7和12.7 s;調節時間分別為16.7,14.9和14.9 s。試驗結果表明所設計方法負向初始偏差響應收斂。 為驗證性能指標權重的變化對優化后最優參數控制率的影響,設計了一組對比試驗,改變性能指標的權重比例,尋優后采用結果參數,并分析尋優參數的響應數據,步驟如下: 1)設置速度為1.5 m/s,初始偏差為8 m,試驗組1中權重bj2設為15,試驗組2中權重bj2設為25,提高其中一個權重,其他權重則相對降低; 2)采用上述優化方法獲得2組最優參數kp、kd、bbang-bang分別為0.2、3、0.8和0.1、3、0.7; 3)采用上述2組參數進行仿真試驗,初始偏差為8 m,主機速度設為1.5 m/s。 試驗結果如圖10所示,第1組相較第2組上升時間減少0.07 s,調節時間減少0.02 s,穩態偏差增加0.007 9 m。理論上改變指標的權重能夠改變最優參數控制率的響應指標,可以根據需求整定最優參數。但是試驗結果表明,由于最優參數附近的響應曲面平緩,這些參數的響應數據各項性能指標都很相近,實際作用不顯著。 為了研究位速耦合縱向相對位置控制方法與傳統PD方法[25]的差異,設計了雙PD縱向相對位置控制器,將速度誤差PD反饋和位置偏差PD反饋相加獲得控制輸出。 針對位置偏差PD控制器的參數運用上文相同的優化方法進行參數優化,結果如表2。參數優化結果表明,位置偏差PD控制方法與主機速度的相關性比位速耦合控制方法高。 表2 位置偏差PD控制參數kp_d和kd_d的優化結果 Table 2 Position deviation PD control parameters kp_d and kd_d optimization results 仿真對比試驗設計:3組對比試驗,主機速度設置為0.5、1.0和1.5 m/s,位速耦合控制器參數kp、kd和bbang-bang分別設置為0.2、3和0.8,雙PD控制器參數kp、kd、kp_d和kd_d分別設置為0.2、3、0.5和3.75,測試控制方法的速度適應性,性能指標包括上升時間、調節時間和超調量。試驗驗結果如表3所示。試驗結果表明: 表3 控制性能仿真對比試驗 Table 3 Simulation and contrast test of control performance 1)主機速度為0.5 m/s時,最優參數下本文方法相較雙PD方法,上升時間減小3.8 s,調節時間減小10.2 s; 2)主機速度為1.0 m/s時,最優參數下本文方法相較雙PD方法,上升時間增加4.7 s,調節時間增加5.7 s; 3)主機速度為1.5 m/s時,本文方法依然穩定,而雙PD方法出現135%的超調,且收斂較慢。最優參數下本文方法相較雙PD方法,上升時間增加1.0 s,調節時間減小42.7 s,超調量減小135個百分點。 上述分析表明,采用傳統PD方法能夠獲得良好性能,但是參數速度適應性較差。由于實際作業時針對不同農機、地況和不同主機速度,難以進行人工全局整定。 為了研究位速耦合縱向相對位置控制方法的適應性和精度,搭建了雙機導航協同收獲試驗系統,系統由收獲機和運糧車組成,收獲機(雷沃重工GE80S-H)與運糧車(雷沃重工M1104)均具備電控底盤,能夠實現電控轉向與發動機轉速控制,主要參數如表4。采用RTK-GNSS定位模塊(司南公司K728),定位信息獲取頻率為10 Hz,水平定位精度±(10+D×10-6)mm;車輪轉角傳感器采用BEI-9902120CW,非線性度為±2%,A/D采樣精度為12位;轉向執行機構為力士樂公司的HT801053;雙機通訊采用2組2.4 GHz頻率通信模塊(EBYTE公司的E34-DTU(2G4D20)),模塊與控制終端通過RS-232通訊;控制終端為AGCS-Ⅰ控制器和觸控顯示屏,控制終端通過CAN總線與雙機的底盤電控單元(Electronic Control Unit)通訊;位速耦合縱向相對位置控制方法移植于AGCS-Ⅰ控制器內。軟件部分采用Metrowerks Code Warrior for ARM Developer Suite v1.2開發。系統結構和試驗平臺如圖11與圖12所示。 協同系統試驗在雷沃阿波斯智慧農業示范基地進行,對主從系統分別規劃目標直線路徑,采用預瞄點導航控制方法[17]控制橫向偏差,采用本文所設計的位速耦合縱向相對位置控制方法進行縱向偏差控制,控制器參數kp、kd和bbang-bang分別設置為0.2、3和0.8。收獲機(主機)行駛速度按照實際作業需求設置為1 m/s,運糧車(從機)進行跟隨,運糧車手動檔位設置于中一檔,通過調節發動機轉速進行位速協同,可調范圍在0.7~1.6 m/s之間。設置3個水平的初始縱向相對位置偏差進行控制性能試驗,分別為3、7和10 m,代表短距、中距和長距的跟蹤過程,每組初始距離進行3次重復試驗。以10 Hz頻率對縱向相對位置偏差和縱向相對速度偏差進行記錄。 以平均穩態縱向相對位置偏差和穩態縱向相對位置偏差的標準差σd為雙機進入穩定協同狀態時的相對縱向距離控制精度指標,以平均穩態縱向相對速度偏差和穩態縱向相對速度誤差的標準差σv為雙機進入穩定協同狀態時的縱向相對速度控制精度指標;以雙機協同縱向相對位置控制穩態時間ts、上升時間tr和超調量Mp反映控制方法在跟蹤過程中的收斂性能。通過以上指標分析控制質量。 設置3、7和10 m初始縱向相對位置偏差的3組重復試驗結果如表5所示。通過不同的試驗結果可知本文提出的控制方法和優化參數的適應性較好,試驗結果可重復性良好。全部試驗的平均穩態縱向相對位置偏差絕對值為0.091 8 m,穩態縱向相對位置偏差的標準差為0.117 3 m,控制精度滿足協同卸糧作業需求,對其他作業如加種加油同樣可行。平均超調量為1.7%,平均穩態速度偏差為0.012 3 m/s,協同過程平穩,在可調速度范圍內實現了縱向協同控制。 表5 不同初始偏差下縱向相對位置控制試驗結果 Table 5 Longitudinal relative position control test results with different initial deviations 文獻[25]中田間協同試驗中主機速度為0.83 m/s時,試驗結果表明兩機的相對位置平均偏差為0.13 m,方差為0.15 m。文獻[23]在仿真系統中運用滑模變控制方法控制2臺農機的縱向相對位置,仿真試驗結果表明平均偏差為0.106 m。與上述研究比較,本文針對運糧車行駛系統建立簡化平行協同模型和運動學模型,進行了系統模型辨識和控制參數優化,并通過田間驗證了所設計方法的相對位置平均偏差分別降低29.2%和13.2%。 為驗證位速耦合縱向相對位置控制方法在實際收獲作業時的控制質量,2019年7月在甘肅金昌進行了雙機協同小麥收獲試驗。試驗場景如圖13所示。 依據待收獲小麥田塊規劃U型收獲路徑。收獲路徑沿待收區域設定,收獲機路徑向前進方向左側平移4.5 m設置為運糧車行駛路徑,形成一個大U型路徑嵌套于收獲的U型路徑外側。保證糧筒展開后卸糧點位于運糧車中軸線附近。依據小麥收獲常規作業速度,速度設定為1 m/s,運糧車跟隨接糧。只在直線收獲路徑上卸糧,接近轉彎時停止卸糧并收回卸糧筒。協同模式中運糧車與收獲機從田頭并排起始。收獲機為主機,運糧車為從機。收獲機先作業,運糧車等待收獲機的啟動信號再啟動。運糧車行駛在外圈,行程大于收獲機,為了安全作業轉彎時需要前后錯開,所以田間試驗運糧車初始縱向位置偏差為正。初始偏差非人為設置,由協同作業自然形成。試驗指標與前文一致。 小麥收獲試驗的雙機協同軌跡如圖14a所示,協同過程分為來去2段,分別編號為1和2。縱向相對位置偏差和縱向速度偏差如圖14b、圖14c所示,各項性能指標如表6所示。平均穩態縱向相對位置偏差絕對值為0.077 8 m,穩態縱向相對位置偏差的標準差為0.091 3 m。協同精度能夠滿足收獲協同卸糧的需要。 表6 雙機協同收獲縱向相對位置控制試驗結果 Table 6 Two-machine coordinated harvesting longitudinal relative position control test result 針對自主導航收獲協同卸糧過程中縱向相對位置控制需求以及拖車驅動系統非線性度較高的問題,本文構建了簡化平行協同模型,設計了位速耦合縱向相對位置控制方法,結合直線跟蹤控制方法,實現了雙機收獲協同卸糧作業,主要結論如下: 1)為研究所設計方法的實際性能,進行了不同初始縱向偏差的田間雙機協同試驗。主機速度為1 m/s,初始縱向偏差分別為3、7和10 m時,平均調節時間分別為7.73、17.2和23.2 s。田間試驗平均穩態偏差絕對值為0.091 8 m,速度平均穩態誤差為0.012 3 m/s。由于運糧車系統目前還無法自動切換高低檔位,通過發動機調節前進速度范圍有限,所以未進行不同速度主機的適應性研究,研發自動切換高低檔位的運糧車系統,能夠進一步深入研究控制方法的速度適應性。 2)為優化控制器參數建立仿真模型。采用面積辨識法獲取了油門車速開環二階傳遞函數,并基于該傳遞函數設計拖拉機速度控制仿真模型。運用該模型獲取了控制器優化參數,進行本文方法與傳統PD方法的對比試驗,試驗結果表明,主機速度為1.5 m/s時,本文方法相較傳統PD方法,上升時間減小1.0 s,調節時間減小42.7 s,超調量減小135%。本文方法克服了傳統PD方法參數速度適應性差的問題。 3)實際協同收獲作業表明,主機速度在1 m/s時,縱向相對位置控制收斂,平均穩態縱向相對位置偏差為0.077 8 m,穩態縱向相對位置偏差的標準差為0.091 3。能夠適應實際作業工況,協同精度能夠滿足收獲協同卸糧的需要。4 縱向相對位置控制系統仿真模型
4.1 行駛速度系統模型辨識
4.2 縱向相對位置協同系統仿真模型
4.3 仿真模型驗證
4.4 位速耦合控制器參數仿真優化

4.5 控制性能對比仿真試驗

5 雙機協同縱向相對位置控制方法性能試驗
5.1 試驗系統
5.2 試驗方案
5.3 結果與分析
6 田間作業試驗

7 結 論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50數學物理學報(2020年2期)2020-06-02 11:29:24兒童故事畫報(2019年5期)2019-05-26 14:26:14光學精密工程(2016年6期)2016-11-07 09:07:19Coco薇(2016年2期)2016-03-22 02:42:52核科學與工程(2015年4期)2015-09-26 11:59:03Coco薇(2015年1期)2015-08-13 02:47:34小雪花·成長指南(2015年7期)2015-08-11 15:03:12小雪花·成長指南(2015年4期)2015-05-19 14:47:56