碳纖維“骨架”柔性電熱驅動器的制備及其自形變性能
2021-08-04 09:21:02張曉慧杜鮮晶田明偉曲麗君
毛紡科技 2021年7期
關鍵詞:碳纖維
張曉慧,杜鮮晶,田明偉,2,曲麗君,2
(1.青島大學 紡織服裝學院,山東 青島 266071;2.省部共建生物多糖纖維成形及生態紡織國家重點實驗室,山東 青島 266071)
在外界刺激下可以發生形狀、體積的可逆改變或機械運動的柔性驅動器[1-3]在生物應用[4]、軟機器人[5-6]、人工肌肉[7-8]、人機交互[9-10]等領域具有巨大的應用潛力。外界刺激包括電、光、濕度、磁力、溶劑等,其中電驅動具有可控、輕質、無需電極、操作簡易、環境適應性強的優勢[11],受到了廣泛的關注。目前盡管在電刺激響應領域已經取得了很大成就,但電熱驅動器普遍還存在變形幅度小、驅動力不足的問題,極大地限制了其實際應用。為了提高驅動性能,Jing等[12]經連續過濾制備了碳納米管/氧化石墨烯雙層驅動器,驅動器在1 V電壓下可彎曲230°~250°,2 V電壓下驅動時間縮短至0.4 s,將驅動器嵌入面料和襯里中制得可調身體溫濕度的智能服裝。Ahn等[13]將銀納米線與碳納米管分散液涂覆在多孔織物基材表面,可實現機械互鎖以及驅動器多層之間的化學鍵合,顯著提高了機械耐久性,通過制造仿生自行走機器人和物體提升軟機器人,成功地證明了所提出的驅動器的實用性。
石墨烯是一種具有完美sp2雜化鍵的二維碳材料,具有極高的電子遷移率、巨大的比表面積、優異的機械強度和柔韌性[14-16]。基于其優異的物理性能,石墨烯及其衍生物通常作為活性層與其他功能材料結合,形成不對稱雙層結構[14],構成柔性驅動器。石墨烯材料能夠改善活性層的導電性、導熱性和機械強度,提高驅動器整體驅動性能[17]。Chang等[18]通過簡單地復合石墨烯和聚丙烯制備了可響應光和電的雙晶片驅動器,具有大且可逆的變形(角度變化> 100°),快速響應(≈8 s)和低驅動電壓(≤7 V),用于構造具有智能機械輸出的多種仿生設備。Wang等[19]通過將銀顆粒加入還原氧化石墨烯中,并與聚酰亞胺復合,制備了雙層驅動器。銀顆粒有效地降低了電阻,提高了驅動性能。
為了提高驅動器的性能,本文將高強高模量的碳纖維(CF)[20-21]作為“骨架”材料添加入石墨烯/聚酰亞胺(G/PI)雙層膜中,制備了三明治結構的電熱驅動器。碳纖維“骨架”使得電阻降低,增強了機械性和導電導熱性,在輸入電壓6 V下,驅動器可提供109°的大彎曲角和7.25 mN(其質量的10.3倍)的輸出力。基于上述性能,制備了自爬行機器人,證明了驅動器可用于柔性機器人領域中。
1 實 驗
1.1 實驗材料與設備
實驗材料:碳纖維(長絲束,比電阻為0.02(Ω·g)/cm2,單纖維直徑7.5 μm,深圳特力化纖股份有限公司),石墨烯漿料(固含量為5%,片層平均厚度2.4 nm,片層尺寸5~15 μm,寧波墨西科技有限公司),耐高溫聚酰亞胺(面密度86 g/m2,厚度50 μm,3 M中國有限公司)。
實驗儀器:ZEISS EVO18掃描電子顯微鏡(德國卡爾蔡司集團),A645sc紅外熱像儀(美國FLIR公司),4200A-SCS參數分析儀(美國Keithley公司),KXN-305D直流電源(深圳市兆信電子儀器有限公司)。
1.2 電熱驅動器的制備
碳纖維“骨架”柔性電熱驅動器的制備過程如圖1(a)所示。首先,碳纖維均勻平行地鋪放在硅片上,PI薄膜黏附并施加壓力使二者充分黏合,得到CF/PI雙層復合膜,其中PI長度方向與纖維軸向平行,黏附的碳纖維含量0.84~1.01 mg/cm2。然后,在復合膜貼附碳纖維的一面上通過電噴涂的方法層層涂覆石墨烯并在室溫下干燥。其中石墨烯溶液(1 g/L)經超聲分散后使用,噴槍使用參數設置[2]如下:噴涂壓力設為0.5 MPa,液體流量為0.5 mL/cm2,每次噴涂時間為5 s。涂覆石墨烯使其達到一定的厚度,得到G-CF/PI三明治結構驅動器,在一定的電壓作用下,會產生可逆的彎曲,彎曲示意圖如圖1(c)所示。將驅動材料剪成所需的“U”形,即得G-CF/PI電熱驅動器,當接通6 V的電壓后,實際的彎曲角度如圖1(b)所示,并在斷掉電源之后,恢復到原來的狀態。

圖1 電熱驅動器
2 實驗結果與討論
2.1 電熱驅動器形貌特征
圖2為柔性電熱驅動器的掃描電子顯微鏡圖像。橫截面圖像(圖2(a)(b))中,碳纖維分布在中間層,上層是層層堆疊的石墨烯,下層是聚酰亞胺薄膜,表明石墨烯較均勻地堆疊在CF/PI表面,且碳纖維緊密均勻地分散在石墨烯和PI薄膜之間,構成明顯的三明治結構,碳纖維的介入為三明治結構提供了有力的支撐,為驅動器機械性能和導電導熱性的增強提供了可能。從表面形態圖中(圖2(c))可以看出PI表面光滑緊密,石墨烯表面(圖2(d))粗糙,呈現褶皺狀,碳纖維兩側不同的表面形態有利于驅動器的彎曲角度的增加。

圖2 電熱驅動器SEM圖像
2.2 驅動器電熱性能
碳纖維“骨架”柔性電熱驅動器的彎曲變形是基于導電層的電熱轉換能力和各層材料熱膨脹系數(CTE)的不同從而導致在通電過程中產生了不均勻應力。當施加電壓時,石墨烯和碳纖維可以通過焦耳熱效應將電流轉換為熱能并傳遞到PI層。PI層和導電層之間存在很大的熱膨脹系數差異:PI的CTE為正值且較高[22],石墨烯的CTE為負值且較低[23],碳纖維在軸向方向上具有較小的負值CTE[24]。隨著溫度的升高,PI分子鏈被激活并擴展,在宏觀上表現為體積膨脹[2]。與此同時,石墨烯和碳纖維由于較低的CTE,在宏觀上均表現出熱穩定性,導致驅動器向石墨烯側彎曲。當電源關閉時,隨著溫度下降,驅動器恢復初始狀態。
為探究石墨烯的涂覆量對自形變性能的影響,分別制備了4組具有不同石墨烯厚度的驅動器。石墨烯厚度分別為15、30、45、60 μm。由圖3(a)可知,驅動器的方阻隨著石墨烯層厚度的增加而逐漸降低。電熱測試中,施加電壓,驅動器的溫度在10 s內快速上升并達到穩態溫度,斷開電壓,溫度快速下降,表明了快速的熱響應。電壓越大,驅動器的溫度越高(圖3(b))。由于電阻最小,石墨烯層最厚的驅動器(60 μm)達到的溫度最高,呈現了最好的電熱轉換能力。

圖3 電熱驅動器的電熱性能
2.3 電熱驅動器自形變性能
施加電壓后,驅動器在石墨烯層發生彎曲變形。不同的電壓下,驅動器的自形變不同。圖4給出了電熱驅動器在不同電壓下的彎曲角數據。在低電壓(≤ 8 V)下,驅動器具有大的彎曲變形,體現了優異的自形變性能。由圖可知,電熱驅動器的彎曲變形隨著施加電壓和涂覆石墨烯厚度的增加而增大。

圖4 電熱驅動器在不同電壓下的最大彎曲角
對于驅動器的應用,驅動力是一項重要指標。碳纖維的加入明顯增強了驅動器產生的驅動力。相同條件下,測得4組驅動器在6 V電壓下的驅動力分別為5.78、6.47、6.90、7.25 mN。其中石墨烯層最厚驅動器的驅動力是其質量的10.3倍,而在同一電壓下,彎曲角的角度最大,為109°,是性能最優驅動器。
圖5示出了制備的碳纖維“骨架”驅動器與先前報道的驅動性能(包括驅動電壓、最大彎曲角和驅動力)比較[22,25]。可以看出,碳纖維“骨架”致動器在較低的驅動電壓下具有較大的彎曲變形和較大的驅動力[26-28]。
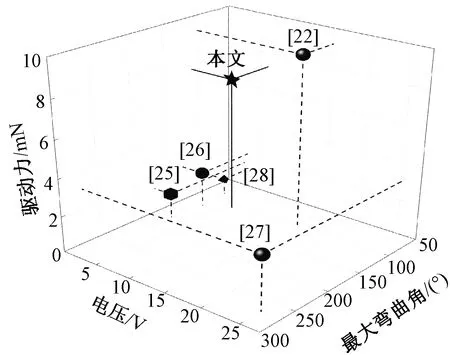
圖5 “骨架”驅動器與先前報道的性能對比
2.4 電熱驅動器的應用
為證明所提出的電熱驅動器在仿生柔性機器人領域的實用性,制造并測試了1個U形復合膜構成的自爬行柔性機器人。為了保證運動過程中的統一性,將一塊輕質紙板放在U形驅動器的底部。驅動器的兩端都貼上梯形薄紙,作為機器人的“腳”而接觸地面,從而進一步模擬微型柔性機器人。對此施加周期性電壓(通電10 s,關閉8 s),并使用具有粗糙表面的海綿作為步行地面。施加電壓后,機器人發生彎曲變形而使后腿向前移動。斷開電源后,驅動器逐漸恢復到平直狀態,后腿幾乎處于同一位置,前腿向前移動,機器人向前爬行。由于周期性供電,機器人以周期性的狀態完成了蠕蟲蠕動運動。完整的爬行過程如圖6所示,給出了柔性機器人分別在0、65、152、218 s時的運動狀態,最終柔性機器人在218 s內向前爬行54 mm。

圖6 爬行機器人的運動過程
3 結束語
碳纖維“骨架”作為導電導熱和機械增強劑添加進復合膜中,制備具有高自形變性能的柔性G-CF/PI電熱驅動器。在6 V電壓下,所制備的電熱驅動器可提供109°的大彎曲角和7.25 mN(其質量的10.3倍)的驅動力。自爬行機器人的制備及運動過程證明了驅動器在柔性機器人領域的應用潛能。通過多種方法制備的復合薄膜狀電熱驅動器來實現高自形變性能,將在智能系統、人造肌肉、人機交互等領域具有廣闊的應用前景。
猜你喜歡
紡織科學研究(2021年6期)2021-12-02 20:32:56
建材發展導向(2021年14期)2021-08-23 00:56:58
上海建材(2019年4期)2019-05-21 03:13:02
纖維復合材料(2018年1期)2018-12-07 00:40:26
纖維復合材料(2018年4期)2018-04-28 08:45:28
纖維復合材料(2018年3期)2018-04-25 07:22:58
纖維復合材料(2018年4期)2018-02-18 19:02:51
纖維復合材料(2018年4期)2018-02-18 19:02:51
中國塑料(2016年6期)2016-06-27 06:34:16
機械工程師(2015年10期)2015-02-02 01:14:08
