某商用車可兼容手動(dòng)擋車型的定速巡航控制策略
2021-08-04 11:07:50倪一銘楊河清
汽車電器 2021年7期
倪一銘,楊河清
(南京依維柯汽車有限公司,江蘇 南京 211806)
汽車定速巡航控制的英文為Cruise Control,縮寫為CC。汽車定速巡航控制系統(tǒng)是一種根據(jù)駕駛員需求車速進(jìn)行車速自控制的系統(tǒng),在一定條件下(如一定車速范圍內(nèi)),駕駛員通過操縱開關(guān)與整車控制器進(jìn)行交互,傳遞并設(shè)定客戶需求,在不踩油門踏板情況下通過巡航控制開關(guān)精確加減車速或自動(dòng)保持車輛在某一恒定速度下行駛,可以減少駕駛員頻繁調(diào)節(jié)油門踏板操作帶來的腳部疲勞及視覺疲勞;精確車速控制如配合動(dòng)力總成扭矩與功率的針對(duì)性模式優(yōu)化控制,可帶來行駛舒適性、經(jīng)濟(jì)性提升;合理使用可減少車輛超速帶來的違章困擾。
定速巡航控制系統(tǒng)大多使用在自動(dòng)擋車型,涉及手動(dòng)擋車型的應(yīng)用大部分是在高車速定擋位模式下。為了安全考慮,以往的手動(dòng)擋定速巡航控制策略,車輛在換擋、踩離合或踩油門踏板時(shí)巡航功能會(huì)退出,以防止出現(xiàn)誤操作,完成上述操作后駕駛員需重新設(shè)定巡航功能,用戶體驗(yàn)一般。隨著人們對(duì)生活工作品質(zhì)需求的提升,巡航控制在汽車上的應(yīng)用越來越普遍和重要,對(duì)巡航控制的安全性和多功能性也提出了更高的要求[1]。基于安全控制策略高級(jí)安全的控制方式也在逐步應(yīng)用到巡航控制系統(tǒng)中,汽車巡航控制系統(tǒng)正在向智能化發(fā)展,如自適應(yīng)巡航控制系統(tǒng)、防誤操作等。某商用車開發(fā)使用了可兼容手動(dòng)擋車型并預(yù)留ACC、AEBS接口的定速巡航控制策略,多條件安全控制策略滿足手動(dòng)和自動(dòng)擋車型的定速巡航控制需求。
1 硬件拓?fù)浣Y(jié)構(gòu)
基本組成:VCM或ECM、BCM、TCU(AT可選)、ESP(可選)、ADAS(可選)、定速巡航開關(guān)、制動(dòng)踏板及開關(guān)、制動(dòng)踏板及位置反饋傳感器、離合器踏板及開關(guān)(MT可選),如圖1所示。

圖1 硬件拓?fù)浣Y(jié)構(gòu)
1)ECM、BCM及其他控制器(TCU、ESP、ADAS)采用多路傳輸技術(shù)CAN網(wǎng)進(jìn)行數(shù)據(jù)傳輸,以確保系統(tǒng)高效、安全、可靠。
2)離合器踏板、制動(dòng)踏板信號(hào)分別硬線接入ECM、BCM,ECM校驗(yàn)兩路信號(hào)以確保信號(hào)可靠,如校驗(yàn)有故障,巡航功能將禁止進(jìn)入。
3)巡航開關(guān)硬線接入BCM,BCM對(duì)巡航信號(hào)進(jìn)行診斷,并通過CAN發(fā)出巡航開關(guān)信號(hào)及巡航開關(guān)故障狀態(tài)。
4)油門踏板信號(hào)及冗余油門踏板信號(hào)硬線接入ECM。
2 控制策略
2.1 巡航條件
本文所述控制策略巡航控制條件如表1所示,共計(jì)29項(xiàng),每一項(xiàng)對(duì)應(yīng)一個(gè)巡航使能狀態(tài)位,如某一項(xiàng)的條件或狀態(tài)不滿足這項(xiàng)設(shè)定的巡航控制條件,則該條件巡航使能狀態(tài)位置位。

表1 控制策略巡航控制條件
同時(shí)本文所述控制策略預(yù)留了設(shè)置掩碼,用以開啟或關(guān)閉巡航條件的監(jiān)測,如表1中的“20 ACC控制禁用信號(hào)”,在手動(dòng)擋車型上不配置ACC的情況下,可以設(shè)置ACC控制項(xiàng)的條件掩碼為0,這樣通過掩碼的狀態(tài)結(jié)果始終為0,以關(guān)閉此項(xiàng)目條件監(jiān)測,如表2情況2與情況4。
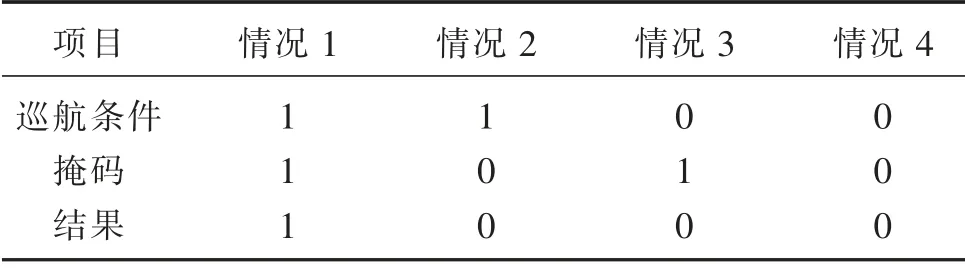
表2 項(xiàng)目條件監(jiān)測
某商用車使用本巡航開關(guān)策略,當(dāng)滿足以下條件時(shí)進(jìn)入巡航控制。
1)發(fā)動(dòng)機(jī)啟動(dòng)(2),巡航開關(guān)開啟(1),擋位在2擋及以上(14),車速信號(hào)在24~160km/h之間(15),巡航開關(guān)請(qǐng)求進(jìn)入巡航控制(1)。
2)其他項(xiàng)目條件均滿足。
2.2 巡航退出條件
巡航退出條件如圖2所示,對(duì)應(yīng)巡航的28項(xiàng)條件。

圖2 巡航退出條件
根據(jù)巡航退出后是否能夠通過巡航開關(guān)RES鍵恢復(fù)巡航車速設(shè)置兩種掩碼,可恢復(fù)車速掩碼、不可逆掩碼。區(qū)別為:當(dāng)設(shè)置可恢復(fù)車速掩碼并且退出條件滿足時(shí),巡航控制退出,上一次設(shè)置的巡航車速可以通過RES鍵恢復(fù);對(duì)應(yīng)設(shè)置不可逆掩碼的巡航條件滿足時(shí),設(shè)置的巡航車速將被重置。當(dāng)29項(xiàng)條件通過設(shè)置的掩碼后得到的退出巡航狀態(tài)大于0,則巡航控制退出。如巡航開關(guān)關(guān)閉(1)、車速低于24km/h(15)、檢測到制動(dòng)信號(hào)(11)、擋位信號(hào)不符合(14)、AEBS處于激活狀態(tài)(21)等。
控制策略面向手動(dòng)擋車型,可使在正常操縱情況下踩離合器升擋不退出巡航控制,如圖3所示,升擋后車速平穩(wěn)保持在巡航設(shè)定車速。

圖3 控制策略
如情況1:車速設(shè)定在70km/h、擋位在5擋,踩離合升6擋后,車速可恢復(fù)至70km/h;情況2:車速設(shè)定在80km/h,當(dāng)前車速為30km/h,駕駛員按順序進(jìn)行升擋過程中,續(xù)航不退出,自動(dòng)匹配擋位車速上升至設(shè)定的80km/h。
策略是通過設(shè)置換擋保留模式功能來實(shí)現(xiàn)的,當(dāng)巡航控制時(shí),程序中保留模式開關(guān)設(shè)置開啟,踩離合換擋巡航功能不退出,換擋后車輛會(huì)保持換擋前的車速,可繼續(xù)通過巡航開關(guān)增加需求巡航車速,但如果離合器踩下時(shí)間超過系統(tǒng)設(shè)置的最大保留時(shí)間,則會(huì)退出巡航模式,保留模式時(shí)間可調(diào),這樣的控制可以提升手動(dòng)擋定速巡航功能操縱駕駛舒適性,并且考慮到安全,換擋檢測超過保留設(shè)置時(shí)間,巡航功能退出。
多判斷條件的設(shè)置面向安全控制策略,接受來自ABS/ESP(EBC1或VDC1)、AEBS、ACC的關(guān)閉巡航控制需求,緩速器激活時(shí)巡航控制退出,減速過快(冗余制動(dòng)檢測),加速度過高,車速偏差超過一定時(shí)間,到達(dá)車速限制,速比(車速/發(fā)動(dòng)機(jī)轉(zhuǎn)速)過高或過低,制動(dòng)器信號(hào)狀態(tài),不允許的擋位(倒擋、空擋或一擋),發(fā)動(dòng)機(jī)轉(zhuǎn)速過高或過低,手制動(dòng)或電子駐車制動(dòng)激活,硬件或信號(hào)故障導(dǎo)致的禁止啟用巡航(如離合器、車速信號(hào)、制動(dòng)信號(hào)等故障)這些條件并行組合,可以確保在不適宜巡航控制的條件下及時(shí)退出巡航控制,以確保安全可靠。
如,情況1:越級(jí)加擋,會(huì)導(dǎo)致發(fā)動(dòng)機(jī)轉(zhuǎn)速過低,從而退出巡航;情況2:接收到制動(dòng)信號(hào)或駐車制動(dòng)信號(hào),巡航將立刻退出;情況3:換擋后,如果發(fā)動(dòng)機(jī)轉(zhuǎn)速變化超過閾值,巡航將退出;情況4:制動(dòng)開關(guān)信號(hào)或車速信號(hào)異常,將阻止進(jìn)入巡航控制或立即退出巡航。
多判斷條件組合考慮到各種可能出現(xiàn)的意外,面向安全。
2.3 ADAS接口
控制策略預(yù)留有ADAS的ACC和AEBS接口。
1)ACC接口:巡航的控制需求可調(diào)整由ACC發(fā)起(1),可將CC功能作為ACC控制策略的組成部分,可接受響應(yīng)ACC控制器的ACC控制禁用信號(hào)退出巡航(20),也設(shè)置有內(nèi)部安全判斷,外部(ESP、ACC等)車速或扭矩需求增加巡航控制扭矩的時(shí)間超過允許時(shí)間(26)、外部(ESP、ACC等)車速或扭矩需求降低巡航控制扭矩的時(shí)間超過允許時(shí)間(27)。
2)AEBS接口:AEBS激活時(shí)立即退出巡航功能(21),用以響應(yīng)AEBS功能。
3)DMS接口:預(yù)留駕駛員狀態(tài)監(jiān)測接口,當(dāng)接收到駕駛員狀態(tài)異常信號(hào)時(shí),如駕駛員疲勞等,巡航將立刻退出。
以上功能可通過儀表提示駕駛員,告知巡航功能退出原因,人機(jī)交互性良好。
3 功能測試
軟件開發(fā)好后針對(duì)手動(dòng)擋實(shí)車換擋進(jìn)行測試,如圖4所示,手動(dòng)擋車型在正常換擋時(shí),即換擋或踩離合在保留模式計(jì)時(shí)范圍內(nèi)(離合器信號(hào)見序號(hào)5紫色線條,第10s踩下持續(xù)0.9s,保留模式信號(hào)見序號(hào)8綠色點(diǎn)劃線與離合器信號(hào)同步),換擋后車輛將繼續(xù)按巡航車速行駛(車速信號(hào)見序號(hào)7紅色線條,擋位信號(hào)見序號(hào)6深藍(lán)色線條),駕駛員可繼續(xù)通過巡航開關(guān)提升車速。如圖5所示,如遇手動(dòng)車型換擋時(shí)間或踩離合時(shí)間過長,超過設(shè)置的保留模式時(shí)間1.3s,保留模式退出(圖5序號(hào)8綠色點(diǎn)劃線),但離合器信仍未松開(圖5序號(hào)5綠色點(diǎn)劃線),巡航功能立即退出,車速開始下降,設(shè)置的巡航需求車速仍然保留(序號(hào)4天藍(lán)色線條),駕駛員可以通過RES鍵恢復(fù)巡航車速,功能滿足設(shè)計(jì)要求。
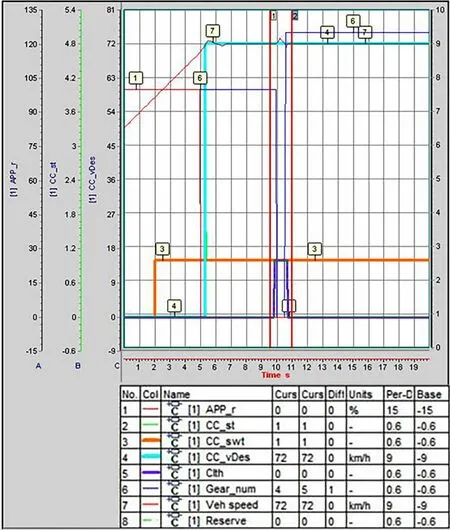
圖4 保留功能啟用,換擋后,巡航功能不退出
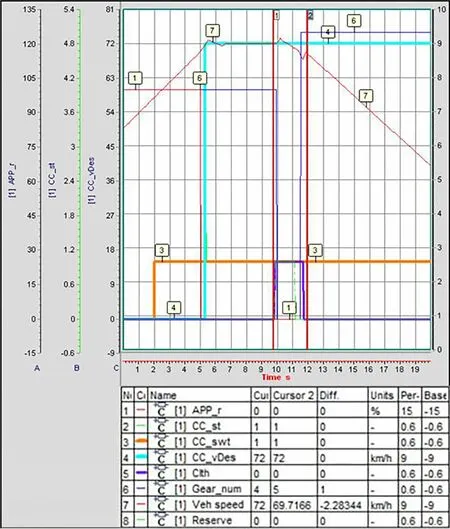
圖5 保留模式超時(shí),巡航功能退出
針對(duì)ADAS接口功能進(jìn)行了實(shí)車測試,如圖6所示,當(dāng)控制器在第2s接收到總線AEBS激活狀態(tài)信號(hào)后(序號(hào)8棕色線條),巡航功能立即退出(序號(hào)2綠色線條從1置0),車輛開始制動(dòng),車速迅速下降,設(shè)置的巡航需求車速重置為0(序號(hào)4天藍(lán)色線條)。如圖7所示,當(dāng)控制器在第5s接收到總線DMS退出指令后(見序號(hào)8天深綠色線條),巡航功能立即退出(見序號(hào)2綠色線條從1置0),設(shè)置的巡航需求車速重置為0(序號(hào)4天藍(lán)色線條),避免因駕駛員疲勞等問題帶來的不良后果,并可通過儀表提醒駕駛員,告知巡航功能退出原因,人機(jī)交互性良好。

圖6 接收到AEBS激活狀態(tài)后,巡航功能退出
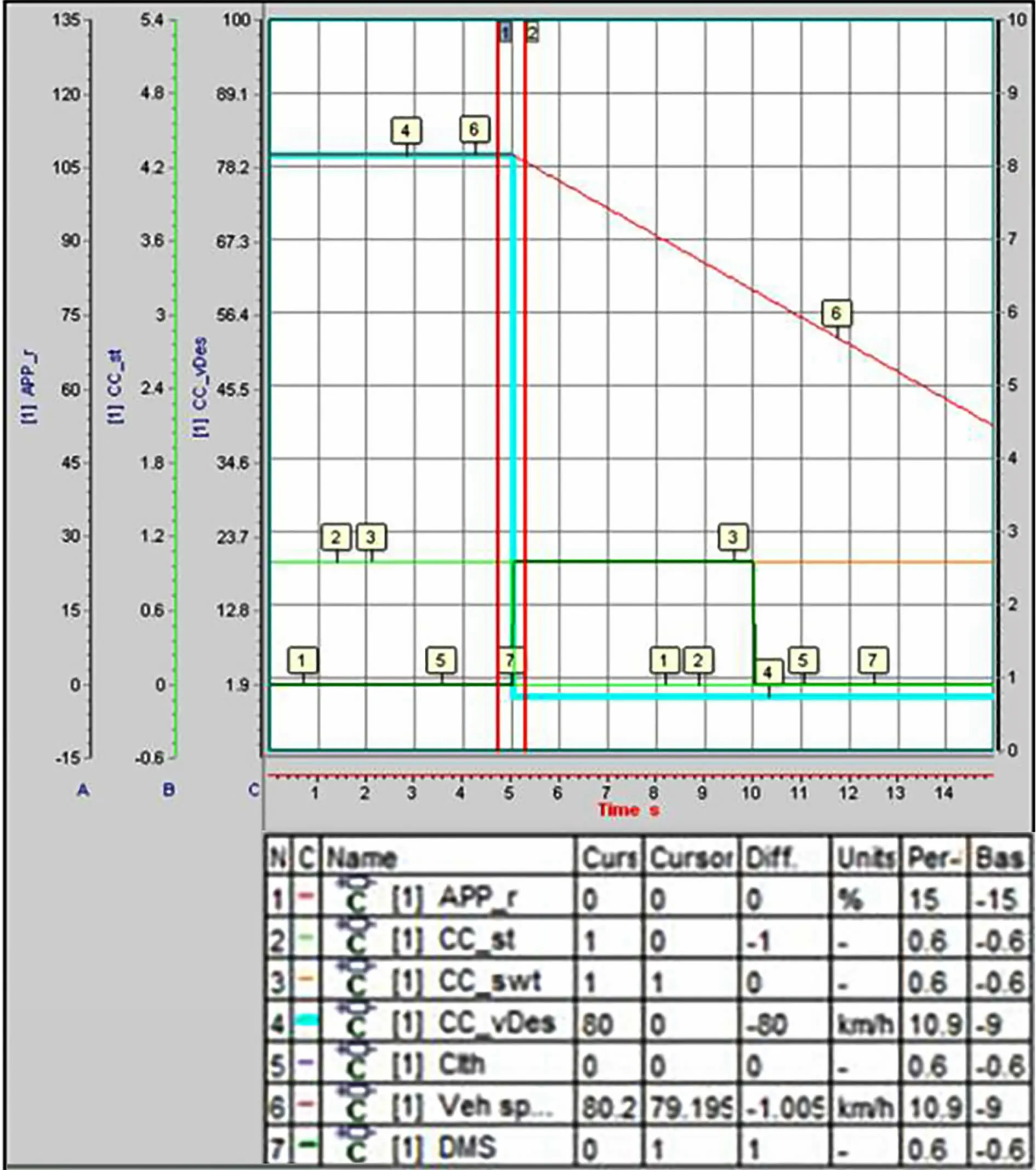
圖7 接收到DMS指令后,巡航功能退出
4 結(jié)束語
本文對(duì)在某商用車中開發(fā)使用的定速巡航控制策略進(jìn)行了詳細(xì)描述,尤其在定速巡航條件控制策略方面,對(duì)定速巡航控制的進(jìn)入退出條件及控制策略作了詳細(xì)介紹,對(duì)各個(gè)模塊的功能進(jìn)行了充分地解釋和說明,并且對(duì)該定速巡航控制策略進(jìn)行了大量的功能測試驗(yàn)證和測試結(jié)果分析,取得了比較理想的測試結(jié)果。策略緊跟技術(shù)發(fā)展潮流,不僅可兼容手動(dòng)擋車型,而且預(yù)留ADAS接口,基于安全控制策略設(shè)計(jì),滿足手動(dòng)和自動(dòng)擋車型定速巡航控制需求,提升了手動(dòng)擋定速巡航功能操縱駕駛舒適性,并且安全可靠,人機(jī)交互性良好。
猜你喜歡
少先隊(duì)活動(dòng)(2021年4期)2021-07-23 01:46:22
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
電子制作(2018年11期)2018-08-04 03:25:42
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
沈陽醫(yī)學(xué)院學(xué)報(bào)(2015年1期)2015-12-27 13:44:40