基于強(qiáng)化LSTM的網(wǎng)絡(luò)安全態(tài)勢(shì)預(yù)測(cè)方法
2021-08-02 03:35:30蘇小玉董兆偉孫立輝徐奎奎
計(jì)算機(jī)技術(shù)與發(fā)展 2021年7期
關(guān)鍵詞:網(wǎng)絡(luò)安全模型
蘇小玉,董兆偉,孫立輝,徐奎奎
(河北經(jīng)貿(mào)大學(xué) 信息技術(shù)學(xué)院,河北 石家莊 050700)
0 引 言
國(guó)家互聯(lián)網(wǎng)應(yīng)急中心(簡(jiǎn)稱“CNCERT”)發(fā)布的《2019年我國(guó)互聯(lián)網(wǎng)網(wǎng)絡(luò)安全態(tài)勢(shì)綜述》[1]報(bào)告指出,隨著國(guó)內(nèi)互聯(lián)網(wǎng)技術(shù)中云計(jì)算、大數(shù)據(jù)、物聯(lián)網(wǎng)、人工智能等新技術(shù)新應(yīng)用的大規(guī)模發(fā)展,網(wǎng)絡(luò)安全事件日益增多。對(duì)于日益復(fù)雜化和多樣化的網(wǎng)絡(luò)攻擊,傳統(tǒng)防護(hù)措施如防火墻、訪問控制、漏洞掃描和入侵檢測(cè)等從主動(dòng)防御和被動(dòng)防御兩方面進(jìn)行防護(hù),這些安全設(shè)備雖然具有安全事件和安全日志的記錄功能,但是各設(shè)備之間相互獨(dú)立,安全信息分散,無法共享。網(wǎng)絡(luò)安全管理員很難監(jiān)控全局網(wǎng)絡(luò)狀況,攻擊發(fā)生時(shí)無法做出適當(dāng)決策。為解決上述問題,T.Bass[2]首次將態(tài)勢(shì)感知的概念引入網(wǎng)絡(luò)安全領(lǐng)域,態(tài)勢(shì)預(yù)測(cè)作為態(tài)勢(shì)感知中的主要研究部分,根據(jù)歷史態(tài)勢(shì)數(shù)據(jù)的分析構(gòu)建預(yù)測(cè)模型,獲取態(tài)勢(shì)數(shù)據(jù)之間的規(guī)律,預(yù)測(cè)網(wǎng)絡(luò)未來的變化狀況。
網(wǎng)絡(luò)安全態(tài)勢(shì)變化具有復(fù)雜性、非線性和時(shí)變性特點(diǎn),而神經(jīng)網(wǎng)絡(luò)技術(shù)對(duì)于復(fù)雜系統(tǒng)具有更高的容錯(cuò)性,更強(qiáng)的非線性映射能力和泛化能力。因此一些學(xué)者將神經(jīng)網(wǎng)絡(luò)技術(shù)應(yīng)用于網(wǎng)絡(luò)安全態(tài)勢(shì)預(yù)測(cè)領(lǐng)域。與傳統(tǒng)的機(jī)器學(xué)習(xí)模型相比,深度學(xué)習(xí)模型在網(wǎng)絡(luò)安全態(tài)勢(shì)預(yù)測(cè)領(lǐng)域顯示出巨大的潛力。文獻(xiàn)[3-4]研究了基于BP神經(jīng)網(wǎng)絡(luò)的網(wǎng)絡(luò)安全態(tài)勢(shì)預(yù)測(cè)模型。雖然BP神經(jīng)網(wǎng)絡(luò)對(duì)于網(wǎng)絡(luò)安全態(tài)勢(shì)預(yù)測(cè)具有一定的效果,但是BP神經(jīng)網(wǎng)絡(luò)自身算法的不足導(dǎo)致存在很多的局限性。網(wǎng)絡(luò)安全態(tài)勢(shì)感知復(fù)雜場(chǎng)景和動(dòng)態(tài)變化的特點(diǎn)使得網(wǎng)絡(luò)安全事件的發(fā)生具有極大的概率性和突發(fā)性,文獻(xiàn)[5]提出基于LSTM的網(wǎng)絡(luò)安全態(tài)勢(shì)預(yù)測(cè)方法,LSTM神經(jīng)網(wǎng)絡(luò)是對(duì)遞歸神經(jīng)網(wǎng)絡(luò)(RNN)的改進(jìn),在處理時(shí)間序列數(shù)據(jù)具有強(qiáng)大的性能。文獻(xiàn)[6]提出基于LSTM的網(wǎng)絡(luò)流量預(yù)測(cè)方法,引入粒子濾波約束算法優(yōu)化網(wǎng)絡(luò)的參數(shù)。針對(duì)基于LSTM神經(jīng)網(wǎng)絡(luò)的網(wǎng)絡(luò)訓(xùn)練過程中收斂速度慢影響訓(xùn)練成本的問題,文獻(xiàn)[7-11]提出采用智能優(yōu)化算法提高LSTM神經(jīng)網(wǎng)絡(luò)模型的收斂速度。
文獻(xiàn)[12]針對(duì)傳統(tǒng)神經(jīng)網(wǎng)絡(luò)在預(yù)測(cè)中存在的預(yù)測(cè)精度不高、效率低的問題,提出一種基于門控遞歸單元(GRU)的遞歸神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)的新方法。該方法從原始的時(shí)間序列數(shù)據(jù)中提取信息特征應(yīng)用到深度RNN模型中進(jìn)行訓(xùn)練和驗(yàn)證。經(jīng)過迭代和優(yōu)化,訓(xùn)練的模型可以獲得網(wǎng)絡(luò)安全預(yù)測(cè)的準(zhǔn)確性。文獻(xiàn)[13]提出一個(gè)基于兩層遞歸神經(jīng)網(wǎng)絡(luò)LSTM和GRU的預(yù)測(cè)方法,該方法組合了兩種改進(jìn)的遞歸神經(jīng)網(wǎng)絡(luò),雖然預(yù)測(cè)精度有所提高,但是模型的復(fù)雜度有所增加,還延長(zhǎng)了訓(xùn)練模型的時(shí)間。
針對(duì)LSTM神經(jīng)網(wǎng)絡(luò)改進(jìn)的變體中沒有將消失梯度的降低作為關(guān)鍵研究方向,該文提出一種基于sigmoid加權(quán)強(qiáng)化機(jī)制的LSTM網(wǎng)絡(luò)安全態(tài)勢(shì)預(yù)測(cè)方法。該方法在傳統(tǒng)LSTM神經(jīng)網(wǎng)絡(luò)的基礎(chǔ)上改變激活函數(shù),引入sigmoid加權(quán)線性單元處理反向傳播中的梯度問題,將輸入值乘以sigmoid激活函數(shù),使得LSTM具有更復(fù)雜的結(jié)構(gòu)來捕捉輸入層與隱藏層之間的遞歸關(guān)系。
還有研究表明,LSTM神經(jīng)網(wǎng)絡(luò)的超參數(shù)對(duì)于網(wǎng)絡(luò)性能有較大影響,在前期LSTM神經(jīng)網(wǎng)絡(luò)的改進(jìn)方法中,針對(duì)LSTM神經(jīng)網(wǎng)絡(luò)的隱含層數(shù),每層神經(jīng)元的個(gè)數(shù)以及學(xué)習(xí)率等超參數(shù)的確定主要是主觀選取,該文引入布谷鳥搜索算法進(jìn)行超參數(shù)的自動(dòng)尋優(yōu)加速網(wǎng)絡(luò)的訓(xùn)練時(shí)間。實(shí)驗(yàn)結(jié)果顯示,該方法具有更高的準(zhǔn)確率和穩(wěn)定性。
1 基于LSTM的網(wǎng)絡(luò)安全態(tài)勢(shì)預(yù)測(cè)
1.1 LSTM神經(jīng)網(wǎng)絡(luò)中的激活函數(shù)
LSTM網(wǎng)絡(luò)作為一種特殊的遞歸神經(jīng)網(wǎng)絡(luò)(RNN),與傳統(tǒng)的RNN遞歸結(jié)構(gòu)不同,LSTM在解決長(zhǎng)期和短期依賴問題方面具有穩(wěn)定而強(qiáng)大的能力。記憶細(xì)胞取代了傳統(tǒng)神經(jīng)元的隱藏層,是LSTM網(wǎng)絡(luò)的核心。由于有三個(gè)門,即輸入門、輸出門和遺忘門,LSTM網(wǎng)絡(luò)可以向細(xì)胞狀態(tài)添加或刪除信息。LSTM神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示。

圖1 LSTM神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
其中,it為輸入門限層,用來控制信息輸入;ft為遺忘門限層,用來控制細(xì)胞歷史狀態(tài)的保留;ot為輸出門限層,用來控制信息的輸出;σ表示標(biāo)準(zhǔn)的sigmoid函數(shù),用公式(1)表示,tanh函數(shù)用公式(2)表示。
(1)

(2)
LSTM神經(jīng)網(wǎng)絡(luò)的預(yù)測(cè)性能主要取決于激活函數(shù),激活函數(shù)的輸入向量包括當(dāng)前輸入和先前狀態(tài),再根據(jù)隱藏層的結(jié)果預(yù)測(cè)輸出。由于神經(jīng)元在權(quán)值調(diào)整的基礎(chǔ)上學(xué)習(xí)輸入和輸出之間的非線性關(guān)系,因此權(quán)值的分配和調(diào)整對(duì)于激活函數(shù)的結(jié)果有很大影響。在訓(xùn)練階段,由于學(xué)習(xí)率高,初始階段的權(quán)值變化差異較大;當(dāng)權(quán)值接近零時(shí),權(quán)值變化逐漸減小,學(xué)習(xí)停止,此時(shí)說明輸入的變化對(duì)輸出沒有影響。通過分析研究激活函數(shù)的作用,發(fā)現(xiàn)LSTM神經(jīng)網(wǎng)絡(luò)中最常用的激活函數(shù)有sigmoid函數(shù)、雙曲正切(tanh)函數(shù)和校正線性單元(ReLU)。每個(gè)激活函數(shù)各有優(yōu)缺點(diǎn),sigmoid函數(shù)映射0到1之間的任何輸入值范圍。該函數(shù)將大的輸入值壓縮到小的輸出范圍,在反向傳播過程中,函數(shù)的梯度呈指數(shù)下降,導(dǎo)致神經(jīng)網(wǎng)絡(luò)初始層的權(quán)值調(diào)整很小,這個(gè)問題被定義為梯度消失。tanh函數(shù)可以接受的輸入范圍在-1到1之間,從而可以計(jì)算負(fù)輸入的輸出,因此tanh函數(shù)的消失梯度比sigmoid小,但是仍然存在這個(gè)問題。之后研究學(xué)者為了找到更好的激活函數(shù)來緩解梯度問題,研究了校正線性單元(ReLU)激活函數(shù)。ReLU函數(shù)只包含兩個(gè)簡(jiǎn)單的約束條件,如公式(3)所示。ReLU函數(shù)將所有負(fù)值映射為0,其他值映射為x,因此即使很小的輸入值也反映出輸出的顯著變化。然而,ReLU激活函數(shù)存在一個(gè)問題。在ReLU激活函數(shù)的導(dǎo)數(shù)中,x的所有負(fù)值都被映射到零,使得網(wǎng)絡(luò)停止學(xué)習(xí),這將導(dǎo)致神經(jīng)元在一定數(shù)量的無梯度連續(xù)輸入后停止學(xué)習(xí)。ReLU激活函數(shù)的導(dǎo)數(shù),如公式(4)所示。

(3)

(4)
1.2 基于SiLU-LSTM的神經(jīng)網(wǎng)絡(luò)模型
為了避免梯度消失的問題,有必要將梯度保持在一定的反向傳播水平,從而在整個(gè)訓(xùn)練階段神經(jīng)元都處于活動(dòng)狀態(tài)時(shí)繼續(xù)學(xué)習(xí)。LSTM神經(jīng)網(wǎng)絡(luò)作為RNN的改進(jìn),增加了存儲(chǔ)單元。存儲(chǔ)單元模仿人類大腦處理決定時(shí)的方式,執(zhí)行操作來更新信息。標(biāo)準(zhǔn)的LSTM神經(jīng)網(wǎng)絡(luò)包含三個(gè)sigmoid函數(shù)和兩個(gè)tanh函數(shù)。遺忘門決定是否保持當(dāng)前的輸入,輸出門產(chǎn)生預(yù)測(cè)值,這兩個(gè)門已經(jīng)包含在存儲(chǔ)單元中進(jìn)行信息的處理。而輸入門和候選向量在更新細(xì)胞狀態(tài)中起著重要作用,LSTM從細(xì)胞狀態(tài)中學(xué)習(xí)新的信息,并根據(jù)當(dāng)前輸入進(jìn)行分析預(yù)測(cè)輸出值。該文提出將輸入值和輸入門的sigmoid函數(shù)相乘,以及輸入值和候選向量中的tanh函數(shù)相乘,降低梯度消失問題帶來的影響,使得LSTM具有更復(fù)雜的結(jié)構(gòu)來捕獲輸入層和隱藏層之間的遞歸關(guān)系。
SiLU-LSTM的結(jié)構(gòu)如圖2所示。

圖2 SiLU-LSTM神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
當(dāng)決定保留當(dāng)前輸入時(shí),網(wǎng)絡(luò)通過將當(dāng)前輸入與以前的狀態(tài)進(jìn)行比較來學(xué)習(xí)當(dāng)前輸入攜帶的新信息。前一狀態(tài)向量ht-1包含前一輸入和輸出變化的內(nèi)容。在此基礎(chǔ)上,首先輸入門中的sigmoid函數(shù)的范圍是0到1之間的值,描述了當(dāng)前輸入中可用的新信息的范圍,并且所得值乘以輸入值,如公式(5)所示。現(xiàn)在輸入門值的范圍是[0,+∞),避免了輸入向量中相同值范圍的消失梯度,從而使網(wǎng)絡(luò)能夠從每個(gè)輸入中學(xué)習(xí)。
it=xt*σ(Wi·[ht-1,xt]+bi)
(5)
(6)
上述改進(jìn)的LSTM神經(jīng)網(wǎng)絡(luò)具有自穩(wěn)定的優(yōu)點(diǎn),它降低了傳播速率,并且在導(dǎo)數(shù)為零的情況下,收斂到全局最小值,進(jìn)而作為正則化器隱式地抑制了大幅度權(quán)值的學(xué)習(xí)。因此,總有一個(gè)梯度網(wǎng)絡(luò)通過最小化數(shù)據(jù)丟失和網(wǎng)絡(luò)產(chǎn)生的誤差來學(xué)習(xí)新的信息。
LSTM的存儲(chǔ)單元輸出為ht(當(dāng)前隱藏狀態(tài))和Ct(當(dāng)前存儲(chǔ)狀態(tài))。LSTM神經(jīng)網(wǎng)絡(luò)的輸出門和隱藏狀態(tài)如公式(7)、(8)所示。
ot=σ(Wo·[ht-1,xt]+bo)
(7)
ht=ot*tanh(Ct)
(8)
由于各層利用激活函數(shù)產(chǎn)生神經(jīng)網(wǎng)絡(luò)的基本單元即神經(jīng)元的輸出,損失函數(shù)的梯度接近于零,使得網(wǎng)絡(luò)訓(xùn)練繁瑣。通過將輸入數(shù)據(jù)序列與輸入門和候選層的激活函數(shù)相乘,達(dá)到了緩解這種消失梯度問題的目的。在減小消失梯度后,訓(xùn)練網(wǎng)絡(luò)所需的時(shí)間減少。這種時(shí)間的減少會(huì)導(dǎo)致高學(xué)習(xí)率,從而減少損失。對(duì)學(xué)習(xí)率和損失的影響會(huì)使得誤差值降低。
2 布谷鳥搜索算法優(yōu)化模型超參數(shù)
LSTM的遞歸神經(jīng)網(wǎng)絡(luò)具有學(xué)習(xí)序列數(shù)據(jù)之間相關(guān)性的能力,是分析時(shí)間序列數(shù)據(jù)的有效模型。超參數(shù)在優(yōu)化學(xué)習(xí)模型中起著非常重要的作用。在選擇超參數(shù)方面進(jìn)行綜合研究發(fā)現(xiàn),布谷鳥搜索算法作為新型智能算法對(duì)于參數(shù)尋優(yōu)具有很好的效果。布谷鳥算法的聚集性和多樣性通過自然界中優(yōu)勝劣汰和對(duì)環(huán)境的適應(yīng)性能力演化而來,對(duì)于參數(shù)尋優(yōu)問題能夠有效降低搜索時(shí)間,其中的萊維飛行更新使算法具有較強(qiáng)的全局搜索能力。因此該文利用元啟發(fā)式算法布谷鳥搜索(cuckoo search)自動(dòng)尋找適合LSTM網(wǎng)絡(luò)超參數(shù)[14],從而獲得更優(yōu)質(zhì)的模型。
2.1 布谷鳥搜索算法
布谷鳥搜索(cuckoo search,CS),也叫杜鵑搜索,是由劍橋大學(xué)的楊新社教授和S.Deb[15]于2009年提出的一種新興啟發(fā)算法,算法的靈感來自于競(jìng)爭(zhēng)性繁殖模式。在自然界中,某些種屬的布谷鳥將自己的卵偷偷產(chǎn)入宿主巢穴,由于布谷鳥后代的孵化時(shí)間比宿主的幼雛早,布谷鳥的后代幼雛會(huì)本能地破壞同一巢穴中其他的卵(退出巢穴),并發(fā)出比宿主幼雛更響亮的叫聲。很多宿主通過后代的叫聲大小判斷其健康程度,而健康后代獲得的食物較多,進(jìn)而擁有更高的存活率。在某些情況下,宿主也會(huì)發(fā)現(xiàn)巢穴中的陌生卵。這時(shí),宿主將遺棄該巢穴,并選擇其他地方重新筑巢。在與宿主不斷的生存競(jìng)爭(zhēng)中,布谷鳥的卵和幼雛叫聲均朝著模擬宿主的方向發(fā)展,以對(duì)抗宿主不斷進(jìn)化的分辨能力。
自然界中,動(dòng)物尋找食物采用隨機(jī)的方式。一般情況下,動(dòng)物覓食路徑實(shí)際上是一個(gè)隨機(jī)游走,因?yàn)橄乱徊降男袆?dòng)取決于兩個(gè)因素,一個(gè)是當(dāng)前的位置/狀態(tài),另一個(gè)是過渡到下一個(gè)位置的概率。Levy飛行行走的步長(zhǎng)滿足一個(gè)重尾(heavy-tailed)的穩(wěn)定分布,在這種形式的行走中,短距離的探索與偶爾較長(zhǎng)距離的行走相間。在智能優(yōu)化算法中采用Levy飛行,能擴(kuò)大搜索范圍、增加種群多樣性,更容易跳出局部最優(yōu)點(diǎn)。
標(biāo)準(zhǔn)CS使用三個(gè)簡(jiǎn)化規(guī)則:
(1)每只布谷鳥一次產(chǎn)一個(gè)卵,并隨機(jī)選擇寄生巢來孵化它,一個(gè)卵對(duì)應(yīng)一個(gè)解向量;
(2)在隨機(jī)選擇的一組寄生巢中,最好的寄生巢(解決方案)將會(huì)被保留到下一代;
(3)可利用的寄生巢數(shù)量是固定的,一個(gè)寄生巢的主人能發(fā)現(xiàn)一個(gè)外來鳥蛋的概率為Pa(即新的解決方案的概率為Pa)。在這種情況下,宿主可以選擇去掉這個(gè)卵,也可以選擇放棄巢,到新的地方建立一個(gè)全新的巢。
在這個(gè)簡(jiǎn)化的場(chǎng)景中,每個(gè)巢對(duì)應(yīng)一個(gè)卵,這個(gè)卵也代表一只布谷鳥。從數(shù)學(xué)上講,布谷鳥搜索使用局部隨機(jī)游走和全局隨機(jī)游走的組合,由概率Pa控制。
局部隨機(jī)游走,如公式(9)所示。
(9)

使用Levy飛行進(jìn)行的全局隨機(jī)游走,如公式(10)所示。

(10)

(11)
其中,α是步長(zhǎng)比例因子,與所求解問題的規(guī)模有關(guān)。“~”強(qiáng)調(diào)按照隨機(jī)數(shù)L(s,λ)進(jìn)行搜索的步驟應(yīng)該從Levy分布中抽取。
公式(11)表示一個(gè)指數(shù)為λ的冪律分布對(duì)Levy分布的近似。采用Levy飛行搜索使得算法具有更高的遍歷性和可探索性,算法更容易跳出任何局部最優(yōu)解。
2.2 具體優(yōu)化流程
步驟1:初始化神經(jīng)網(wǎng)絡(luò)的超參數(shù),確定迭代次數(shù),學(xué)習(xí)速率,神經(jīng)網(wǎng)絡(luò)隱含層的節(jié)點(diǎn)數(shù)的變化區(qū)間。
步驟2:設(shè)鳥巢個(gè)數(shù)Nest為10,鳥蛋被鳥巢主人發(fā)現(xiàn)的概率Pa為0.25。隨機(jī)生成鳥巢的位置,每個(gè)鳥巢的位置包含4個(gè)參數(shù)(迭代次數(shù),學(xué)習(xí)速率,兩層隱含層的節(jié)點(diǎn)個(gè)數(shù))。根據(jù)鳥巢初始化的各個(gè)參數(shù)進(jìn)行訓(xùn)練,計(jì)算每個(gè)鳥巢的預(yù)測(cè)值,根據(jù)預(yù)測(cè)誤差找到誤差最小的鳥巢位置,保存到下一代。
步驟3:根據(jù)位置和路徑更新公式(10)鳥巢進(jìn)行更新,通過LSTM神經(jīng)網(wǎng)絡(luò)計(jì)算預(yù)測(cè)誤差,與上一步中除最小的鳥巢之外的其他鳥巢進(jìn)行對(duì)比,得出的誤差最小的鳥巢替代誤差最大的鳥巢,從而得到當(dāng)前的最優(yōu)鳥巢位置。
步驟4:得到最優(yōu)的鳥巢,即可得出超參數(shù)的最優(yōu)組合,若達(dá)到精度要求,則返回上一步繼續(xù)搜索,否則輸出當(dāng)前最優(yōu)值。
步驟5:在每一次迭代之后,有一部分巢按照丟棄概率被拋棄,使得該搜索算法可以獲得最佳適應(yīng)度值。
步驟6:在神經(jīng)網(wǎng)絡(luò)模型中輸入訓(xùn)練數(shù)據(jù)進(jìn)行訓(xùn)練,若未達(dá)到預(yù)測(cè)精度或超出迭代范圍,則不斷學(xué)習(xí);若達(dá)到迭代次數(shù)或預(yù)測(cè)精度,則停止神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí),保存當(dāng)前最優(yōu)超參數(shù)組合。
3 網(wǎng)絡(luò)安全態(tài)勢(shì)預(yù)測(cè)模型構(gòu)建過程
網(wǎng)絡(luò)安全態(tài)勢(shì)預(yù)測(cè)描述的是安全態(tài)勢(shì)隨時(shí)間動(dòng)態(tài)變化的行為,根據(jù)歷史態(tài)勢(shì)值預(yù)測(cè)未來態(tài)勢(shì)值。網(wǎng)絡(luò)安全時(shí)間序列數(shù)據(jù)的預(yù)測(cè)可以協(xié)助預(yù)防網(wǎng)絡(luò)安全事件發(fā)生提供決策支持。該文針對(duì)LSTM神經(jīng)網(wǎng)絡(luò)的梯度消失問題,通過將輸入序列分別輸入門和候選向量的激活函數(shù)相乘來緩解梯度消失問題,同時(shí)利用布谷鳥搜索算法優(yōu)化LSTM超參數(shù)以提高網(wǎng)絡(luò)安全態(tài)勢(shì)預(yù)測(cè)精度。
步驟1:將網(wǎng)絡(luò)安全態(tài)勢(shì)值數(shù)據(jù)集劃分為訓(xùn)練集和測(cè)試集,再對(duì)樣本數(shù)據(jù)進(jìn)行預(yù)處理,形成標(biāo)準(zhǔn)樣本矩陣。模型的輸入輸出如表1所示。

表1 模型輸入輸出
表中輸入選取當(dāng)前序列輸入m和前m-1個(gè)態(tài)勢(shì)值,模型的輸出是m+1時(shí)刻的態(tài)勢(shì)值。
步驟2:初始化LSTM神經(jīng)網(wǎng)絡(luò),輸入層節(jié)點(diǎn)m個(gè),輸出層節(jié)點(diǎn)1個(gè),隨機(jī)產(chǎn)生迭代次數(shù),學(xué)習(xí)速率,隱含層節(jié)點(diǎn)個(gè)數(shù),并初始化優(yōu)化超參數(shù)的變化區(qū)間。
步驟2.1:設(shè)鳥巢個(gè)數(shù)Nest為10,鳥蛋被鳥巢主人發(fā)現(xiàn)的概率Pa為0.25。隨機(jī)生成鳥巢的位置,每個(gè)鳥巢的位置包含4個(gè)參數(shù)(迭代次數(shù),學(xué)習(xí)速率,兩層隱含層的節(jié)點(diǎn)個(gè)數(shù))。根據(jù)鳥巢初始化的各個(gè)參數(shù)進(jìn)行訓(xùn)練,計(jì)算每個(gè)鳥巢的預(yù)測(cè)值,根據(jù)預(yù)測(cè)誤差找到誤差最小的鳥巢位置,保存到下一代。
步驟2.2:根據(jù)位置和路徑更新公式(10)鳥巢進(jìn)行更新,通過LSTM神經(jīng)網(wǎng)絡(luò)計(jì)算預(yù)測(cè)誤差,與上一步中除最小的鳥巢之外的其他鳥巢進(jìn)行對(duì)比,得出的誤差最小鳥巢替代誤差最大的鳥巢,從而得到當(dāng)前的最優(yōu)鳥巢位置。
步驟2.3:得到最優(yōu)的鳥巢,即可得出超參數(shù)的最優(yōu)組合,若達(dá)到精度要求,則返回上一步繼續(xù)搜索,否則輸出當(dāng)前最優(yōu)值。
步驟3:在神經(jīng)網(wǎng)絡(luò)模型中輸入訓(xùn)練數(shù)據(jù)進(jìn)行訓(xùn)練,若未達(dá)到預(yù)測(cè)精度或超出迭代范圍,則不斷學(xué)習(xí);若達(dá)到迭代次數(shù)或預(yù)測(cè)精度,則停止神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí),保存當(dāng)前最優(yōu)超參數(shù)組合。
步驟4:構(gòu)建遺忘門,初始化其偏置量為1,作用是減小在訓(xùn)練的初始階段遺忘過多的信息。

步驟6:構(gòu)建輸出門的過程與傳統(tǒng)的模型一致,通過ot和Ct獲得當(dāng)前時(shí)刻的輸出值。
步驟7:計(jì)算輸出值之后,為驗(yàn)證算法的準(zhǔn)確性,將測(cè)試樣本數(shù)據(jù)集輸入預(yù)測(cè)模型中得到預(yù)測(cè)態(tài)勢(shì)值作為模型的輸出結(jié)果,構(gòu)造預(yù)測(cè)模型的均方誤差函數(shù)MSE作為模型的目標(biāo)函數(shù),利用Adam算法更新神經(jīng)網(wǎng)絡(luò)的權(quán)重和偏置量,直到模型的訓(xùn)練誤差達(dá)到預(yù)先設(shè)定的目標(biāo)并保存模型。
4 仿真實(shí)驗(yàn)與分析
4.1 數(shù)據(jù)來源
該文采用的實(shí)驗(yàn)數(shù)據(jù)為國(guó)家互聯(lián)網(wǎng)應(yīng)急中心(簡(jiǎn)稱CNCERT)官方網(wǎng)站公布的真實(shí)數(shù)據(jù)。選取2012年12月31日至2020年5月31日《網(wǎng)絡(luò)安全信息與動(dòng)態(tài)周報(bào)》的數(shù)據(jù),該數(shù)據(jù)集以周為單位統(tǒng)計(jì)態(tài)勢(shì)信息。選取2013年至2019年的數(shù)據(jù)作為已知數(shù)據(jù)訓(xùn)練模型。當(dāng)預(yù)測(cè)模型對(duì)2020第一周態(tài)勢(shì)值進(jìn)行預(yù)測(cè)之后,把預(yù)測(cè)值納入已知數(shù)據(jù)集,以此類推預(yù)測(cè)2020年共計(jì)22周態(tài)勢(shì)值。最后將預(yù)測(cè)態(tài)勢(shì)值與真實(shí)態(tài)勢(shì)值對(duì)比并計(jì)算誤差,進(jìn)而判斷預(yù)測(cè)模型的預(yù)測(cè)精度。
該文以專家經(jīng)驗(yàn)為指導(dǎo)對(duì)五種網(wǎng)絡(luò)安全威脅進(jìn)行權(quán)重分配,如表2所示。

表2 五種網(wǎng)絡(luò)安全威脅進(jìn)行權(quán)重分配
該方法直觀體現(xiàn)網(wǎng)絡(luò)安全態(tài)勢(shì)值。具體的網(wǎng)絡(luò)安全態(tài)勢(shì)值計(jì)算方法為:

(12)
其中,SA表示網(wǎng)絡(luò)安全態(tài)勢(shì)值;i表示網(wǎng)絡(luò)安全威脅種類,ω表示對(duì)應(yīng)的權(quán)重,Ti表示某種網(wǎng)絡(luò)安全威脅事件數(shù)量,Timax表示該威脅最大時(shí)的數(shù)值。
對(duì)網(wǎng)絡(luò)安全態(tài)勢(shì)值進(jìn)行歸一化預(yù)處理,公式如下:

(13)
網(wǎng)絡(luò)安全態(tài)勢(shì)圖如圖3所示。

圖3 網(wǎng)絡(luò)安全態(tài)勢(shì)時(shí)間序列
4.2 評(píng)估指標(biāo)與預(yù)測(cè)模型參數(shù)選取
該文選取預(yù)測(cè)評(píng)估指標(biāo)中的平均絕對(duì)誤差(mean absolute error,MAE)、均方根誤差(root mean square error,RMSE)和平均絕對(duì)百分比誤差(mean absolute percentage error,MAPE)用來對(duì)提出的預(yù)測(cè)模型進(jìn)行評(píng)價(jià)。
公式如下:

(14)

(15)
(16)
4.3 仿真實(shí)驗(yàn)結(jié)果分析
4.3.1 與前饋神經(jīng)網(wǎng)絡(luò)對(duì)比
將傳統(tǒng)的LSTM的神經(jīng)網(wǎng)絡(luò)模型與GRU和前饋BP神經(jīng)網(wǎng)絡(luò)進(jìn)行對(duì)比,如圖4所示。LSTM和GRU都是特殊的循環(huán)神經(jīng)網(wǎng)絡(luò)RNN類型,針對(duì)傳統(tǒng)循環(huán)神經(jīng)網(wǎng)絡(luò)RNN存在的問題,LSTM和GRU的提出解決了不能長(zhǎng)期依賴的問題,但是對(duì)比LSTM和GRU可以看出,LSTM更適用于當(dāng)前的網(wǎng)絡(luò)安全態(tài)勢(shì)數(shù)據(jù)集,LSTM神經(jīng)網(wǎng)絡(luò)的擬合效果相對(duì)較好。
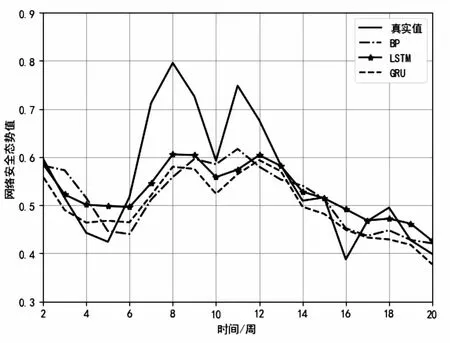
圖4 傳統(tǒng)模型的態(tài)勢(shì)值對(duì)比
4.3.2 與傳統(tǒng)LSTM及優(yōu)化后的LSTM神經(jīng)網(wǎng)絡(luò)對(duì)比
經(jīng)過對(duì)比實(shí)驗(yàn)(1)之后,發(fā)現(xiàn)LSTM神經(jīng)網(wǎng)絡(luò)比其他的傳統(tǒng)神經(jīng)網(wǎng)絡(luò)的誤差小。因此在進(jìn)一步的實(shí)驗(yàn)中,選擇優(yōu)化LSTM神經(jīng)網(wǎng)絡(luò),對(duì)LSTM神經(jīng)網(wǎng)絡(luò)進(jìn)行改進(jìn)具體是將輸入值和輸入門的sigmoid函數(shù)相乘,以及輸入值和候選向量中的tanh函數(shù)相乘,降低梯度消失問題帶來的影響,使得LSTM具有更復(fù)雜的結(jié)構(gòu)來捕獲輸入層和隱藏層之間的遞歸關(guān)系。圖5表示優(yōu)化后的模型對(duì)于測(cè)試樣本的預(yù)測(cè)中,文中提出的模型總體擬合度優(yōu)于其他方法。

圖5 不同預(yù)測(cè)模型的態(tài)勢(shì)值對(duì)比
如圖6所示,文中提出的模型在整體誤差精度上比其他模型小,尤其在均方誤差中較為明顯,相比傳統(tǒng)的BP、LSTM、GRU誤差降低了7.4%、4.5%、5.6%。實(shí)驗(yàn)結(jié)果表明,文中提出的模型對(duì)于網(wǎng)絡(luò)安全態(tài)勢(shì)值的預(yù)測(cè)具有更好的準(zhǔn)確性。根據(jù)表3預(yù)測(cè)評(píng)估指標(biāo)衡量預(yù)測(cè)結(jié)果的準(zhǔn)確性,不同預(yù)測(cè)指標(biāo)的值越小表明模型的預(yù)測(cè)效果預(yù)測(cè)越好。

圖6 不同模型的誤差對(duì)比

表3 不同模型的誤差分析
5 結(jié)束語
網(wǎng)絡(luò)安全態(tài)勢(shì)序列存在時(shí)序性和非線性特點(diǎn),LSTM神經(jīng)網(wǎng)絡(luò)由于具有良好的處理長(zhǎng)期依賴問題的能力,在處理時(shí)間序列時(shí)具有強(qiáng)大的性能。針對(duì)LSTM神經(jīng)網(wǎng)絡(luò)降低消失梯度的問題,提出基于強(qiáng)化LSTM神經(jīng)網(wǎng)絡(luò)模型進(jìn)行網(wǎng)絡(luò)安全態(tài)勢(shì)預(yù)測(cè),結(jié)合預(yù)測(cè)模型挖掘?qū)W(wǎng)絡(luò)安全態(tài)勢(shì)要素和態(tài)勢(shì)值之間的關(guān)聯(lián)規(guī)律,同時(shí)引入布谷鳥算法自動(dòng)確定網(wǎng)絡(luò)的超參數(shù),避免主觀因素影響網(wǎng)絡(luò)性能,準(zhǔn)確提供給網(wǎng)絡(luò)安全管理人員較好的決策。實(shí)驗(yàn)結(jié)果表明,該模型提高了預(yù)測(cè)精度。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工會(huì)博覽(2023年27期)2023-10-24 11:51:28
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中國(guó)生殖健康(2019年10期)2019-01-07 01:21:04
信息安全研究(2018年12期)2018-12-29 11:01:46
小學(xué)生必讀(中年級(jí)版)(2018年4期)2018-07-05 06:00:48
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
聲屏世界(2015年7期)2015-02-28 15:20:13