馬鈴薯收獲農機農藝融合試驗
2021-07-29 02:53:18柳國光程林潤
農業工程 2021年6期
關鍵詞:作業
柳國光,王 濤,程林潤,張 良
(金華市農業科學研究院,浙江 金華 321017)
0 引言
馬鈴薯收獲環節勞動強度大、人力成本高,實現機械化是馬鈴薯產業平穩發展的關鍵因素之一。目前,歐美等發達國家馬鈴薯收獲主要為聯合收獲機,其功能齊全、自動化程度高,可一次性完成挖掘、分離和裝車,經濟效益明顯,但對馬鈴薯的種植規模和規范性要求較高,且價格昂貴。我國丘陵地區地塊小而分散,不適用聯合收獲機[1]。我國馬鈴薯機械化起步較晚,馬鈴薯機械化收獲率低,且分布非常不均,以丘陵山區為主的南方11省馬鈴薯收獲機數僅占全國總數的1.8%,浙江省的馬鈴薯收獲機更少[2]。
針對缺少適用丘陵山區的經濟型、緊湊型馬鈴薯收獲機的現狀,近年來,我國陸續研制出許多低成本、小型馬鈴薯收獲機。馬鈴薯收獲技術的研究主要集中在挖掘和分離兩大部件上,在部分土地平整、土壤沙性較好的馬鈴薯產區獲得了良好的效果,但在浙江省丘陵地區黏性土壤使用時,出現破損率高、明薯率低和運行穩定性差等情況,影響機械收獲的效率和質量,農民對機械化收獲信心不足[3-7]。浙江省農業生產中普遍存在勞動力成本高和“用工荒”等問題,嚴重制約了浙江省馬鈴薯產業的健康發展。本文在分析丘陵山區馬鈴薯機械化收獲復雜環境的基礎上,通過農機農藝融合的方法,增強了馬鈴薯收獲機對丘陵山區的適應性,對浙江省馬鈴薯生產機械化具有一定的促進作用。
1 機械化收獲難題
馬鈴薯收獲機在浙江省丘陵山區應用時,最常出現的問題為四輪拖拉機牽引力不足熄火,需要提起后掛收獲機重新啟動,使得作業不連續,有時甚至出現完全無法作業的情況。其次,挖掘深度不易控制,挖掘過深時,挖出的土壤較多,薯土分離不徹底,明薯率較低;挖掘過淺時,挖掘刀容易割破馬鈴薯、降低品質。最后,拖拉機容易壓上地壟使懸掛的收獲機傾斜,造成明薯率低和破損率高同時出現的情況。
浙江省馬鈴薯機械化收獲的主要難題是收獲機穩定性差和作業效果不理想。
1.1 原因分析
浙江省馬鈴薯機械化收獲穩定性和作業效果都不理想的主要原因除了現有收獲機的設計主要針對平原地區外,還受浙江省丘陵地區馬鈴薯種植農藝的影響。
1.1.1 穩定性影響因素
馬鈴薯收獲機穩定性差主要表現在拖拉機牽引力不足導致熄火,無法作業。牽引力不足有2種情況:一是挖掘深度過深,阻力過大,超過拖拉機的輸出動力;二是出現土壤壅堵情況,牽引阻力大幅上升。挖掘過深主要是由于馬鈴薯種植深度不一致,為盡可能減少破損,作業時主動加大挖掘深度,在壟高溝深或土壤濕度較大的地方會出現阻力過大情況。土壤壅堵的主要原因:一是浙江省馬鈴薯種植地塊黏性土壤較多,當土壤的黏性較大時,土薯分離裝置篩土比較困難;二是人力成本較高,馬鈴薯收獲前的莖葉、雜草和地膜去除人工投入不足,導致收獲機作業環境不規范。黏土、雜草、藤蔓和殘余地膜等非常容易造成土壤壅堵,并導致拖拉機牽引力不足而熄火。
1.1.2 作業效果影響因素
馬鈴薯機械化收獲作業效果不理想主要表現在較高的破損率和較低的明薯率。研究表明,大約70%的馬鈴薯機械損傷來自收獲環節,嚴重影響馬鈴薯的品質[8-9]。主要原因有2個方面。一是由于田塊不方正,在馬鈴薯播種時地壟彎曲情況較多,或者拖拉機輪距和壟距相差較大,機械收獲時拖拉機容易壓上一側的種植地壟,導致收獲機挖掘鏟傾斜,在單壟雙行種植模式下會導致同1壟2行馬鈴薯中的一行挖掘過淺破損加劇,另一行挖掘過深明薯下降。二是浙江地區馬鈴薯播種后經常出現雨水天氣,黏性土壤下的地壟在雨后會坍塌變形,除部分地壟高度發生變化外,一些地方還會出現蹋土將壟溝填沒的情況,導致收獲時拖拉機的左右兩側輪胎接觸地面的高度不一致,壟溝底與地壟頂的距離也不一致,使得收獲機作業時挖掘鏟和地壟相對位置發生變化,導致挖掘深度很難保持一致,挖掘過深時,明薯率降低,挖掘過淺時,破損率上升。
1.2 解決方法
由上述可知,導致浙江省馬鈴薯機械化收獲難的主要原因是黏性土壤作業阻力大、浙江省特殊環境下挖掘深度被動變化、作業過程中拖拉機壓壟導致的挖掘鏟傾斜及收獲機作業環境不規范4個方面。因此,在一定程度上實現挖掘深度控制、避免拖拉機壓壟、優化收獲機參數解決黏性土土薯分離和規范馬鈴薯收獲作業環境即可在一定程度上解決上述問題,提高馬鈴薯收獲機的使用效果。
針對上述收獲機左右傾斜和挖掘深度起伏問題,可通過增加電液控制系統來自動調平和控制挖掘深度[10-12]。針對壅堵問題,可采用兩級薯土分離機構,但會大幅增加收獲機的制造、使用和維護成本,不符合浙江省馬鈴薯種植的實際情況[13]。可見,單純提升收獲裝備技術并不能解決浙江省馬鈴薯機械化收獲的難題,反而會給種植戶帶來更大的成本負擔。因此,在不大幅改動馬鈴薯收獲機的基礎上通過馬鈴薯農機農藝融合來優化馬鈴薯收獲作業條件更為簡單易行,同時還可兼顧效益[14]。
2 農機農藝融合技術
2.1 浙江省馬鈴薯種植情況
首先,浙江省馬鈴薯主要種植區域集中在丘陵地區,地多人少,且土地不集中,加上人力和土地成本較高,面對其他馬鈴薯產區的競爭力不強;單個主體的種植面積都比較小,規模效應不明顯,對機械成本承擔能力較弱,無力購買配置高端技術的收獲裝備。其次,為便于小地塊作業,浙江省多采用小型收獲機,裝備改進空間小。最后,由于浙江市場經濟發達,農村中青年基本進入城市打工,農業從業人員以老年為主,只能適應簡單的機械操作。因此,經濟、實用的馬鈴薯農機農藝融合技術是解決馬鈴薯收獲難題的最優選擇。
馬鈴薯收獲農機農藝融合是在不影響馬鈴薯產量和品質的前提下,通過收獲機和馬鈴薯生產農藝的相互協調來規范馬鈴薯收獲的作業環境,提升馬鈴薯機械化收獲的作業效果。馬鈴薯收獲農機農藝融合主要包括農藝的機械作業適應性改進和農機參數對農藝特點的匹配兩部分。
2.2 農藝的機械適應性改進
馬鈴薯種植農藝的機械作業適應性改進主要是為了規范馬鈴薯收獲時的作業條件和環境,避免出現外部不確定因素影響收獲機的作業效果和穩定性。
收獲機挖掘位置的變化主要由于拖拉機壓壟、溝底不平和壟高起伏3個因素造成。在浙江省丘陵地區小地塊,為方便掉頭和提供充足牽引力,一般選用25.74~33.09 kW四輪驅動拖拉機,前后輪距在900~1 200 mm。首先,為保持拖拉機在壟溝內行走避免輪胎壓壟,種植馬鈴薯時壟距應與收獲拖拉機的輪距相匹配。本試驗用拖拉機為東方紅25.74 kW拖拉機,輪距調為最小值900 mm。故壟距應在900 mm左右,壟寬600~700 mm,可單壟雙行交錯種植,以降低對種植密度的影響。其次,為保證壟溝深度和地壟高度,一是在冬馬鈴薯播種覆膜后,農藝上應采用該拖拉機后懸掛的培土機2次培土,確保地膜上覆蓋一定厚度的土壤并使播種后壟溝的深度和地壟的高度基本一致;二是在雨后地壟出現坍塌變形時增加機械中耕、除草和培土環節,將坍塌在壟溝內的土壤再次覆蓋到坍塌的地壟上,確保收獲時壟溝深度和地壟高度的一致性。
牽引阻力過大是拖拉機熄火的主要因素,利用農藝上的改進來穩定收獲機的牽引阻力,可以顯著提高收獲機的穩定性。牽引阻力過大主要有2方面原因:一是挖掘深度過深;二是發生壅堵現象。首先,通過上述針對控制壟溝深度和地壟高度的措施,并合理調整收獲機挖掘鏟的位置,可以有效避免挖掘深度過大導致牽引力不足的情況。其次,為避免因土壤壅堵現象導致的牽引阻力過大問題,除了在結構上合理設計薯土分離裝置外,關鍵是要消除收獲時雜草、殘膜和粗壯莖葉對收獲機的影響。因此,在前期充分培土抑制雜草生長、中期增加機械中耕除草去除溝內雜草的基礎上,還要在機械殺秧前去除地膜以消除殘膜影響。
2.3 收獲機農藝性改進
收獲機農藝性改進主要是保證馬鈴薯收獲機的技術參數能全面覆蓋馬鈴薯種植農藝條件并滿足對馬鈴薯收獲的質量要求,即解決馬鈴薯收獲機存在的穩定性差和收獲效果不理想問題。
2.3.1 收獲機穩定性的改進
為提高丘陵山區馬鈴薯收獲機的穩定性,應在滿足使用要求的基礎上盡量簡化收獲機的機械結構,以減少可能出現故障的部件。根據單壟雙行種植條件下的農機農藝融合馬鈴薯收獲思路,挖掘鏟選擇平面鏟,能提高挖掘鏟和升運鏈銜接的可靠性,便于土壤隨挖隨傳,減少土壤壅堵的可能性。同時,將薯土分離裝置改為被動振動,既可以降低升運鏈的振動幅度以降低馬鈴薯碰撞力度,又減少了一級鏈條傳動,在降低設備成本的同時減少了強振動作業環境下鏈條脫落的風險。馬鈴薯收獲機結構如圖1所示,主要由機架、挖掘鏟和土薯分離裝置3部分組成。收獲機使用前,調整上懸掛螺桿和限深輪來控制挖掘鏟的入土角和吃土量。作業時,收獲機在拖拉機的牽引下鏟起地壟內的馬鈴薯和土壤,并推送至升運鏈,在薯土分離后平鋪在地面上,由人工撿拾完成。

1.挖掘鏟 2.側板 3.懸掛總成 4.變速箱 5.機架 6.升運鏈 7.驅動輪 8.限深輪 9.托輪 10.振動輪 11.導向輪
2.3.2 薯土分離裝置設計
升運鏈桿間隙越大越利于土壤的分離,減少土薯壅堵,因此在滿足使用條件下,篩選間隙越大越好。試驗地塊浙薯956、中早43和興佳2號10株考種結果表明,3個品種50 g以上的中、大薯塊占比均超過80%,薯塊均為橢圓形,3個方向截面皆為橢圓形,考慮到薯塊在輸送時重心在低位,可以用最大橢圓截面的最小尺寸來確定升運鏈桿條的間隙。對考種薯塊進行逐個測量后得到,對于50 g以上的馬鈴薯薯塊,尺寸在55~85 mm,故選擇50 mm篩選間隙可以有效分離出中大薯塊,同時小薯塊由于底部土壤較多,多數也能被成功篩選。還可以在升運鏈薯土分離裝置上增加主動振動輪,使升運鏈邊輸送邊抖動,加大土壤的篩落。同時增加挖掘鏟和懸掛總成之間的距離,提高可通過量,減少土壤、藤蔓、雜草和地膜壅堵的情況。
2.3.3 作業參數的優化
馬鈴薯收獲機在實際使用中存在的主要問題是土壤壅堵導致的拖拉機牽引力不足,需要停機調整,如圖2所示,這嚴重影響收獲機作業效率。通過農機農藝融合去除因雜草、殘留莖葉和地膜等外部因素導致的土壤壅堵后,完成牽引速度、輸送分離能力和吃土量的匹配可以解決壅堵問題。
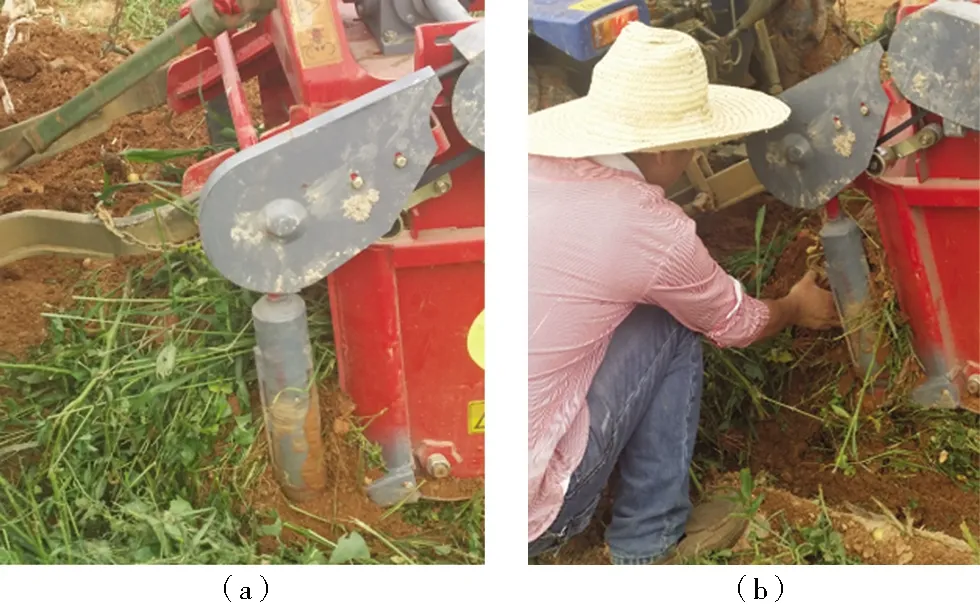
圖2 土壤壅堵
(1)牽引速度設計。
薯土分離裝置作為馬鈴薯收獲機的主要部件之一,安裝在挖掘鏟之后,完成挖掘鏟推送來的薯土混合物的分離。有研究表明,收獲機單位寬度吃土量在100~150 kg/(s·m)時分離的土壤可達70%~80%,在壟寬0.8 m,挖掘深度0.25 m的條件下,可得牽引速度在0.4~0.6 m/s時,土薯分離比較充分且傷薯率較低。為提高收獲效率,選擇上限0.6 m/s作為收獲機作業時的牽引速度[15]。
(2)升運鏈線速度的確定。
在升運鏈輸送馬鈴薯和土壤混合物的過程中,設置較高的升運鏈速度可以避免土壤堆積造成的壅堵現象。升運鏈速度過快,會縮短薯土分離時間,使得明薯率顯著下降,同時會使薯塊與升運鏈的碰撞程度加大,破皮情況增多。因此,升運鏈線速度必須與拖拉機牽引速度相匹配。考慮到在中黏土條件下作業,速度系數γ可取1.5,根據0.6 m/s的收獲機牽引速度,計算可得升運鏈線速度為0.9 m/s[16]。
3 田間試驗
3.1 試驗條件
試驗地區選擇在浙江丘陵地區,土壤為輕、中黏性土,試驗品種為浙薯956、中早43和興佳2號。上述3種薯塊較大,且生長特性相似,分別在簡單機械化收獲和基于農機農藝融合的機械化收獲2種模式下進行田間試驗,以獲得適應性較好的馬鈴薯機械化收獲作業模式。
3.2 試驗地點
簡單機械化收獲試驗地點為浙江省農業機械研究院現代農業裝備試驗基地,土質為輕黏黃壤,種植品種為興佳2號,壟距900 mm,壟高200 mm。播種后未嚴格培土,生長期未中耕除草,收獲前雜草比較旺盛,地壟坍塌較多且高低不平。馬鈴薯農機農藝融合試驗地點為金華市澧浦鎮浙江省農作物新品種展示示范基地,土質為輕黏黑土,試驗品種為浙薯956和中早43,壟距900 mm,壟高200 mm,播種后機械培土2次,中期使用機械進行中耕除草培土,收獲前雜草較少,壟形較完整,高低一致。
由于浙江省內種植的馬鈴薯品種較多,土地性質差別較大,馬鈴薯收獲機要適應不同的品種和土壤,就需要將之分為幾類。經驗表明,一般按照馬鈴薯薯塊大小和土壤黏性進行分類選擇機械裝備,收獲效果較為理想。此對比試驗中,興佳2號與浙薯956、中早43在商品薯形狀、大小和結薯位置等區別較小,對收獲機的參數要求一致,可作為大薯類品種試驗。2個試驗基地土壤都為輕黏性土壤,僅顏色稍有區別,土壤黏度對收獲機影響相似,可作為同類地塊。兩者雖然地塊位置和品種都不相同,但基本不影響試驗結果的有效性,且更符合浙江馬鈴薯產業的實際情況,對其進行對比試驗具有一定的參考意義。
3.3 試驗情況
農機院試驗基地收獲機收獲前采用殺秧機進行粉碎去蔓作業,秧蔓粉碎率約90%,去蔓后直接機械化收獲,明薯率一般,破損率相對較高,并多次出現壅堵現象。作業期間,因地壟高度起伏較大,收獲機挖掘深度經過多次調整,嚴重影響馬鈴薯的收獲作業效率,試驗現場如圖3所示。

圖3 簡單機械化收獲試驗
農機農藝融合下澧浦試驗地塊在去蔓前去除地膜。收獲期間收獲機運行穩定,沒有出現壅堵現象和收獲機需要調整的情況,整個作業一次性完成,明薯率和傷薯率較理想,生產效率也基本達標,試驗現場情況及收獲效果如圖4所示。

圖4 基于農機農藝融合的機械化收獲試驗
3.4 試驗結果
試驗主要為了檢驗基于農機農藝融合的丘陵地區馬鈴薯收獲機的作業效果,從而提高馬鈴薯收獲機對浙江丘陵山區特殊環境的適應性。相對于簡單機械化收獲作業,農機農藝融合模式下的收獲機作業效果明顯改善,試驗結果如表1所示。

表1 不同作業狀態的收獲質量
3.5 結果分析
由表1可知,農機農藝融合后明薯率由76.2%提高到92.3%。從試驗過程看主要包括以下3個方面原因。一是農機農藝融合思路下選擇的地塊土壤黏性較低,薯土分離效果較好。二是農藝優化后地壟高度一致,收獲機安裝調整到位后挖掘深度合適,避免了挖掘過深引起的局部吃土量過大來不及篩土的情況。三是優化后的收獲機牽引速度和升運鏈速度匹配度高,能保證設定吃土量下的薯土分離效果。
農機農藝融合后傷薯率從10.6%下降到4.2%。從試驗過程看主要包括以下3個方面原因。一是農藝改進后地壟高度一致性的提高,基本消除了因地壟不平引起的挖掘過淺而導致的挖掘刀切薯現象,避免了局部大面積傷薯情況。二是去除地膜后基本消除了薯塊在升運鏈和殘留大塊地膜間反復碰撞傷皮的情況,減少了馬鈴薯碰撞損傷。三是優化后的收獲機在牽引速度、升運鏈速度和吃土量3方面同步考慮,避免了壅堵引起的牽引力不足而原地反復提升、拉扯及不在指定位置挖掘造成的額外破損。
試驗表明,農機農藝融合后的馬鈴薯收獲機順暢性顯著提高,主要是避免了因殘蔓、雜草或殘膜纏繞導致的壅堵和挖掘過深吃土量過大這2種導致牽引力不足的情況,基本上消除了拖拉機熄火停工的狀況,提高了收獲機的生產效率。
4 結束語
環境適應性是浙江省丘陵地區馬鈴薯收獲機應用中存在的主要問題,主要體現在明薯率、破損率和運行穩定性3個方面。提高明薯率可以降低漏撿損失和人工撿拾成本;降低破損率可以提高商品薯品質;提高穩定性可以增強農戶對機械化作業的信心,是消除農戶對“用工荒”顧慮的關鍵。只有在這3個方面都有顯著提升,才能切實解決馬鈴薯機械化收獲的推廣難題。本文針對這一問題,提出了易于操作的馬鈴薯收獲農機農藝融合模式,適于丘陵緩坡地帶輕、中黏性土壤,為丘陵山區馬鈴薯機械化作業提供了切實可行的方法。
(1)農機農藝融合模式下,通過增加播種后嚴格的機械化培土和機械中耕除草培土,最大限度地提高了地壟高度的一致性,并強化了收獲用拖拉機的運行軌跡,消除了挖掘深度的不確定性,提高了收獲作業環境的標準化。在現階段,相對于在收獲機上增加復雜的挖掘深度檢測和控制裝置,其經濟性、可控性和實用性更高。
(2)農機農藝融合模式下,通過在機械去蔓后增加去除粗壯殘蔓、雜草和殘膜的環節,降低了馬鈴薯收獲機作業環境的復雜性,大幅提高了馬鈴薯收獲機的穩定性,其增加的人工成本相對于收獲機因草蔓膜纏繞和土薯壅堵造成的停工調整、零部件失效、薯塊破損和不能及時收獲等增加的成本較少,可操作性較好。
(3)收獲機結構的簡化便于農戶的維修和操作,也可以減少故障的發生,提高收獲設備的穩定性。牽引速度、升運鏈速度和吃土量3方面的統籌設計僅涉及傳動系統傳動比的優化,避免了復雜的機械結構改進或增加,能很好地繼承現有馬鈴薯收獲機的優點,降低不確定因素,在不大幅增加設備成本的基礎上顯著提升作業效果。
(4)馬鈴薯收獲農機農藝融合模式對中黏壤土和各種沙壤土的改善效果比較明顯,但對重黏土和土壤板結嚴重等條件下的馬鈴薯收獲效果一般,還需要尋求新的技術和方法,重黏土和板結土壤本身不適合馬鈴薯種植,尤其是在大面積種植時應盡量避免。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08