基于特征遷移的室內定位算法研究
2021-07-28 23:17:12萬祥
現代信息科技 2021年2期

摘? 要:傳統基于指紋庫構建的無線地圖沒有考慮室內環境中指紋會隨著接收信號強度的變化而變化這一因素,所以系統魯棒性較差。為了解決這一問題,提出了一種基于特征遷移的室內定位算法,采用最小化最大均值差異算法來減小離線與在線兩個階段所收集數據的分布差異。通過多次應用算法的實驗研究,結果表明,在復雜多變的室內環境中定位準確率得到大幅提升,有效地克服了兩個階段指紋特征分布差異帶來的影響。
關鍵詞:室內定位;特征遷移;最大均值差異
中圖分類號:TN92 ? ? ?文獻標識碼:A 文章編號:2096-4706(2021)02-0044-05
Abstract:The traditional wireless map constructed based on fingerprint database does not consider that fingerprint in the indoor environment will change with the change of the received signal strength,so the system has poor robustness. In order to solve this problem,an indoor positioning algorithm based on characteristics migration is proposed,using minimization the maximum mean discrepancy algorithm to reduce the distribution difference of the collected data between the offline and online stages. By means of several times of experimental study on application of algorithm,the experimental results show that the positioning accuracy in the complex indoor environments has greatly improved,and it effectively overcomes the influence of the distribution difference on fingerprint characteristics between the two stages.
Keywords:indoor positioning;characteristics migration;maximum mean discrepancy
0? 引? 言
基于指紋的室內定位一般包含兩個階段:離線階段和在線階段[1]。在離線階段,將定位區域劃分為具有已知標簽的小區域,各個接收點(Receiving Point,RP)在各個采集區內的固定位置收集接收信號強度(Received Signal Strength,RSS)值以構建指紋數據庫。在在線階段,一旦收集到一條待定位的RSS樣本,系統則通過匹配算法從指紋數據庫中找到與待定位樣本最相似的點進行位置估計。很多科研團隊已經陸續將很多不同算法運用到室內定位領域,文獻[2,3]采用了K近鄰法(K Nearest Neighbor,KNN)和加權K近鄰法(Weighted K Nearest Neighbor,WKNN),但是這兩種算法只對距離敏感,對所收集數據中其他有用信息的運用較少,所以很難提升室內定位的精度;文獻[4]運用了支持向量機(Support Vector Machine,SVM),由于室內定位是多分類的問題,SVM是一個二分類器,所以當數據較多時,訓練起來比較耗時;為應對室內接入點(Access Point,AP)的不斷增多,文獻[5]采用了卷積神經網絡(Convolutional Neural Networks,CNN),因為CNN可有效處理高維數據,且對特征有更好的學習能力。雖然這些室內定位算法在定位性能上表現優異,但都是建立在默認離線收集的指紋和在線測試的指紋遵循相同的分布規律這一前提下。然而,在實際的定位中,RSS指紋的分布會隨著周圍環境的變化而發生偏移,這往往會導致定位性能下降[6],重新收集數據訓練模型又耗時耗力,縮小離線階段與在線階段RSS指紋分布差異是提升系統性能的關鍵,事實證明,遷移學習是該問題的有效解決方案[7,8]。
為解決這個問題,本文提出了基于特征遷移的室內定位算法,在離線階段,通過大量的源域帶標簽和少量目標域帶標簽的指紋構造最優遷移矩陣,以最小化最大均值差異并利用遷移后的源域RSS指紋對分類器進行訓練;在在線階段,對遷移后的目標域RSS指紋進行預測。實驗結果表明該算法使系統魯棒性在一定程度上得到增強。
1? 室內定位影響因素分析
1.1? RSS的波動性
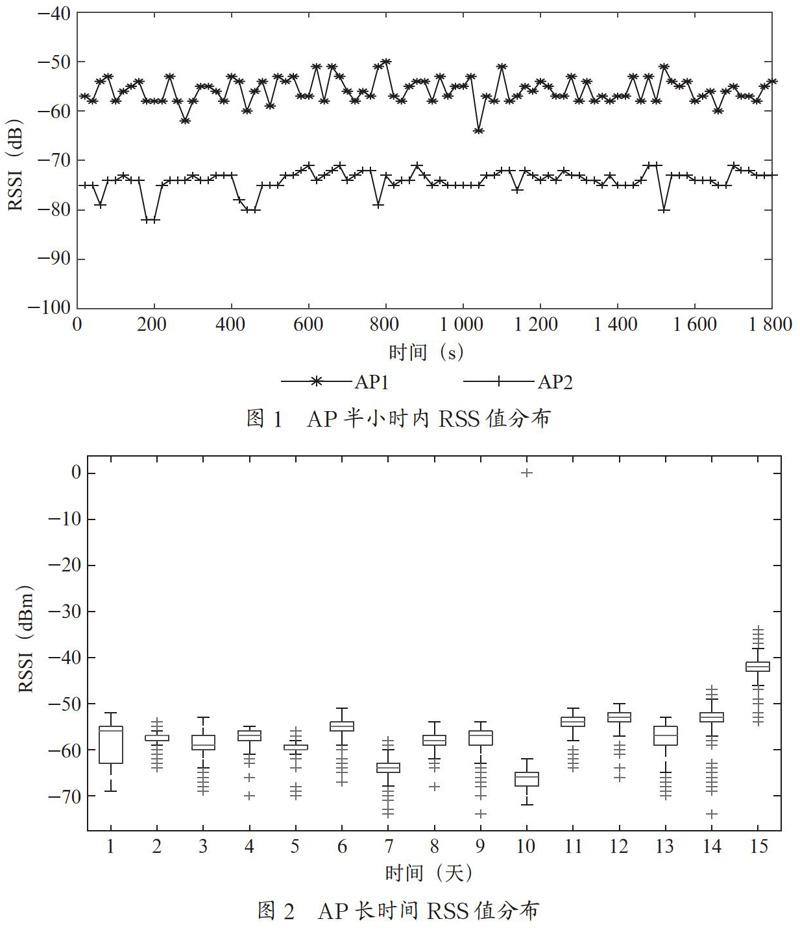
由于受非視距傳播、多徑效應和陰影效應的影響[9-11],RSS值在復雜的室內環境中并非是一成不變的。為驗證RSS的波動性,本小節采用同一智能手機在固定位置進行測試,實驗所用設備為MEIZU,所用系統為Android 5.0,用該手機收集兩個AP的RSSI值在半個小時內的變化情況,其結果如圖1所示。可以看出,在該情況下兩個AP的RSS值分別在某一固定值附近上下波動,較為穩定,可以在短期定位中獲得滿意的結果,但是在實際定位中,定位時長遠遠不止半個小時,如圖2所示,反映了之后15天所采集的RSS變化盒圖。RSS的樣本分布每一天都有較大的不同。所以傳統基于指紋定位方法的魯棒性較差,需要及時更新訓練模型。
1.2? 接入點的不穩定性
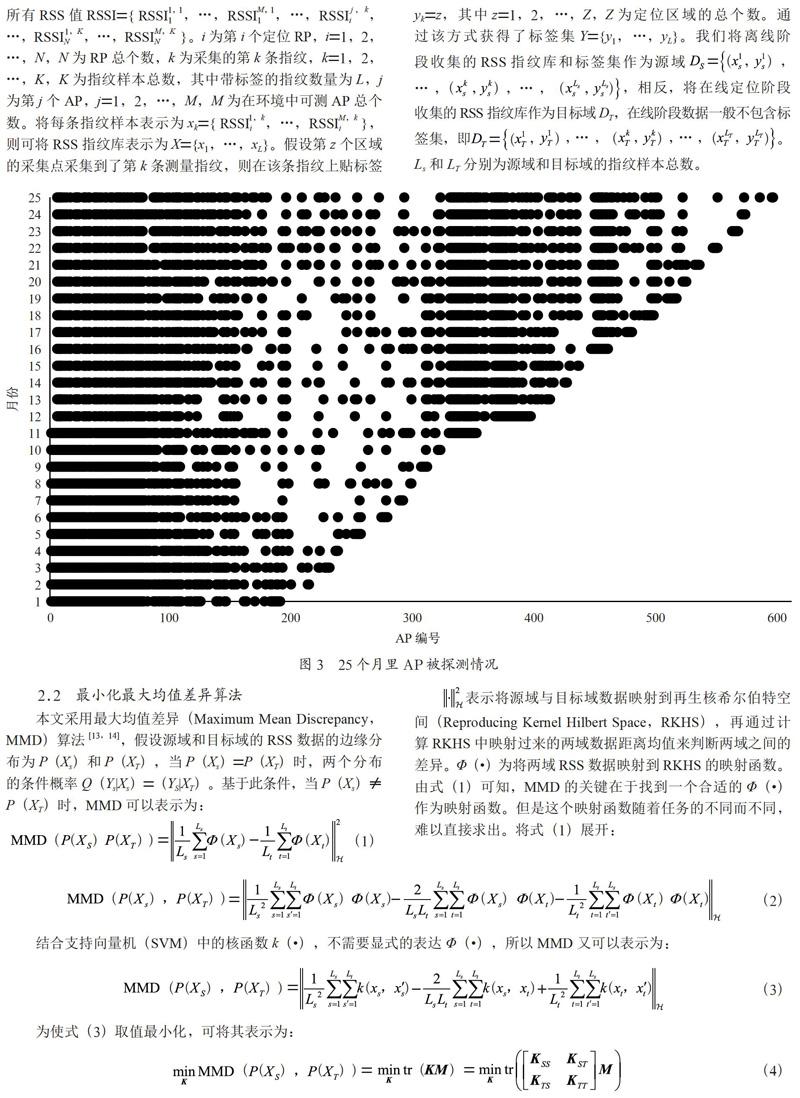
本小節利用文獻[12]提供的公共數據集UJI-DB進行相關的測試和仿真。圖3給出了每個月份檢測到的所有AP,其中黑色圓點表示該AP被檢測到。AP的出現和消失并沒有呈現出明顯的規律,例如前100個AP出現頻率很高,中間部分的AP則呈現出間斷性消失的現象,還有部分AP在前幾個月并沒有出現,但是在后續的月份卻被頻繁地檢測到。表1展示了第一個月采集到的訓練數據的AP數量統計信息,第一月僅過了20天,新增和消失的AP數量就已經十分可觀。隨著時間的推移,在后續月份的在線定位過程中,第一月采集的訓練指紋庫有效性會降低。
2? 基于特征遷移的室內定位系統
2.1? 源域與目標域
從上文可知,由于RSS的波動性和AP的不穩定性,源域和目標域中同一地點所得到的RSS特征分布并不一致,從而導致定位系統魯棒性較差,因此選擇一種合適的度量方法來減小兩域之間RSS特征分布的差異,這也是提高定位系統精確度和魯棒性的關鍵。在WiFi指紋定位中,采集到所有RSS值RSSI={,…,,…,,…,,…,}。i為第i個定位RP,i=1,2,…,N,N為RP總個數,k為采集的第k條指紋,k=1,2,…,K,K為指紋樣本總數,其中帶標簽的指紋數量為L,j為第j個AP,j=1,2,…,M,M為在環境中可測AP總個數。將每條指紋樣本表示為xk={,…,},則可將RSS指紋庫表示為X={x1,…,xL}。假設第z個區域的采集點采集到了第k條測量指紋,則在該條指紋上貼標簽yk=z,其中z=1,2,…,Z,Z為定位區域的總個數。通過該方式獲得了標簽集Y={y1,…,yL}。我們將離線階段收集的RSS指紋庫和標簽集作為源域 ,相反,將在線定位階段收集的RSS指紋庫作為目標域DT,在線階段數據一般不包含標簽集,即。Ls和LT分別為源域和目標域的指紋樣本總數。
2.2? 最小化最大均值差異算法
本文采用最大均值差異(Maximum Mean Discrepancy,MMD)算法[13,14],假設源域和目標域的RSS數據的邊緣分布為P(Xs)和P(XT),當P(Xs)=P(XT)時,兩個分布的條件概率Q(Ys|Xs)=(YS|XT)。基于此條件,當P(Xs)≠
P(XT)時,MMD可以表示為:
表示將源域與目標域數據映射到再生核希爾伯特空間(Reproducing Kernel Hilbert Space,RKHS),再通過計算RKHS中映射過來的兩域數據距離均值來判斷兩域之間的差異。Φ(·)為將兩域RSS數據映射到RKHS的映射函數。由式(1)可知,MMD的關鍵在于找到一個合適的Φ(·)作為映射函數。但是這個映射函數隨著任務的不同而不同,難以直接求出。將式(1)展開:
結合支持向量機(SVM)中的核函數k(·),不需要顯式的表達Φ(·),所以MMD又可以表示為:
為使式(3)取值最小化,可將其表示為:
其中,tr代表矩陣求秩運算,Gram矩陣K∈?(Ls+Lt)×(Ls+Lt),需要注意的是KST=(KTS)′,核函數k(·)采用的是高斯核k(x,y)=,帶寬γ為源域與目標域成對距離的平均值,,將K分解為 ,令,,v≤NM,w為本文所求的特征遷移矩陣,為中間變換矩陣,v為RSS指紋映射到RKHS之后的維度,所以式(4)可寫作:
其中,tr(wTw)為正則項,加入的原因是考慮到實際環境里RSS長時間分布不穩定,其方差往往大于噪聲方差,希望減小MMD算法保留較多的噪聲成分帶來的影響。C為中心矩陣,E為單位矩陣。
2.3? 矩陣優化
為了讓式(5)取得最小值,需要得到最優遷移矩陣w,因此,由拉格朗日乘數法可得:
其中,λ為參數對角矩陣,對式(6)關于w求偏導,并令其等于0,則有:
左右兩邊同乘wT:
由式(8)可知,(KMK+αE)-1KCK的v個最小非零廣義特征值對應的特征向量構成的最優遷移矩陣W即為所求,通過該遷移矩陣可以使源域和目標域分布差異縮小,使其在在線定位階段獲得更可靠的定位結果。
3? 實驗結果與分析
3.1? 實驗數據集
本文利用2.2節提及的UJI-DB數據集進行相關測試和仿真。該數據集在西班牙Jaume I大學圖書館樓的兩層(第3層和第5層)收集了長達25個月的RSS值,在這段測量時間內總共檢測到620個AP,因此十分適合用于RSS時變特性的研究。整個實驗區域占地308.4 m2,分為48個網格點(每層24個),定位實驗中將該區域劃分成18個子區域(每層9個),采集區域、參考格點和子區域設置如圖4所示。數據采集人員在第一個月采集了15組訓練數據集和5組測試數據集,并在接下來的24個月采集了一定數量的補充訓練數據和測試數據。
3.2? 結果與分析
圖5(a)、圖5(b)、圖5(c)分別表示KNN、SVM、CNN在使用MMD算法和不使用MMD算法情況下每個月的定位準確率,可以看出,文中提出基于特征遷移的定位算法的方法使三種算法的準確率均得到提升,可以有效地減少源域與目標域分布不同帶來的不良影響,使系統在較長時間的定位中依然可以做出較為精準的預測。
表2展示了使用MMD后三種算法25個月的平均準確率,可以發現對KNN算法的提升較為明顯,因為該算法在預測過程中對距離較為敏感,傳統的長時間定位下離線階段的指紋庫和在線收集到的樣本分布不一致,使KNN無法得到令人滿意的結果。
4? 結? 論
為解決離線階段和在線階段RSS指紋分布不一致的問題,本文提出了一種基于特征遷移的方法,通過尋找一個最優遷移矩陣將兩個階段RSS指紋分布映射到同一空間,使兩個階段的特征差異具有最小MMD,總之,所提出的方法在一定程度上抵制了環境變化對定位準確性帶來的影響,并增強了系統的魯棒性。同時定位設備的差異和核函數選擇方式也會影響到定位系統的性能,這將作為后續研究的方向。
參考文獻:
[1] 張明華.基于WLAN的室內定位技術研究 [D].上海:上海交通大學,2009.
[2] ADEGE A B,YAYEH Y,BERIE G,et al. Indoor localization using K-nearest neighbor and artificial neural network back propagation algorithms [C]//2018 27th Wireless and Optical Communication Conference (WOCC).Hualien:IEEE,2018:1-2.
[3] YEN L,YAN C H,RENU S,et al. A modified WKNN indoor Wi-Fi localization method with differential coordinates [C]//2017 International Conference on Applied System Innovation (ICASI).Sapporo:IEEE,2017:1822-1824.
[4] CHRIKI A,TOUATI H,SNOUSSI H. SVM-based indoor localization in Wireless Sensor Networks [C]//2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC).Valencia:IEEE,2017:1144-1149.
[5] IBRAHIM M,TORKI M,ELNAINAY M. CNN based Indoor Localization using RSS Time-Series [C]//2018 IEEE Symposium on Computers and Communications (ISCC).Natal:IEEE,2018:1044-1049.
[6] LIU Z Y,DAI B,WAN X,et al. Hybrid Wireless Fingerprint Indoor Localization Method Based on a Convolutional Neural Network [J].Sensors,2019(20):4597.
[7] 莊福振,羅平,何清,等.遷移學習研究進展 [J].軟件學報,2015,26(1):26-39.
[8] DAY O,KHOSHGOFTAAR T M. A survey on heterogeneous transfer learning [J].Journal of Big Data,2017,4(1):29.
[9] 高威,王可東.基于WiFi的RSSI指紋定位方法 [C]//第十一屆中國衛星導航年會.成都:中國衛星導航系統管理辦公室學術交流中心,2020:5.
[10] 張明華,張申生,曹健.無線局域網中基于信號強度的室內定位 [J].計算機科學,2007(6):68-71+75.
[11] 甘露,楊君,郭婭婷.基于室內指紋定位的優化算法 [J].數據采集與處理,2020,35(5):903-909.
[12] MENDOZA-SILVA G R,RICHTER P,JOAQU?N T,et al. Long-Term WiFi Fingerprinting Dataset for Research on Robust Indoor Positioning [J].Data,2018,3(1):3.
[13] SMOLA A,GRETTON A,SONG L,et al. A Hilbert Space Embedding for Distributions [C]//10th International Conference Discovery Science.Sendai:Springer,2007:40-41.
[14] GRETTON A,BORGWARDT K M,RASCH M, et al.A Kernel Two-Sample Test [J].Journal of Machine Learning Research,2012,13(25),723-773.
作者簡介:萬祥(1996—),男,漢族,湖南岳陽人,碩士在讀,研究方向:室內定位。