三維激光掃描在城市更新立面改造中的應用
2021-07-28 03:26:36曾妮紅
北京測繪 2021年7期
關鍵詞:數據處理
劉 江 曾妮紅 陳 琦
(廣州市城市更新規劃研究院, 廣東 廣州 510030)
0 引言
城市更新是大城市發展到一定階段衍生的新型城市發展模式,通過再開發、整治改善和保護的方式來不斷經營一個好的都市環境。作為國家中心城市的廣州在省國土資源廳(現省自然資源廳)的指導下,堅持先行先試、改革創新,經歷了從“三舊改造”到“城市更新”的探索,為加快盤活存量建設用地、促進經濟轉型提供了示范。在老舊小區微改造方面,廣州從2016年開始微改造實踐工作,至今已完成多個老舊社區的微改造,積累了豐富的改造經驗。
習近平總書記指出,“城市管理應該像繡花一樣精細”。為了讓“繡花”功夫深化城市更新老舊小區微改造,傳統的粗放式城市更新立面改造基礎數據獲取手段已無法滿足需求。現在的城市更新立面改造工程要求每個立面能獲取所有細節,包括空調位置、排水口位置、“三線”位置等,并要求出圖成果與實際尺寸誤差要控制在5 cm內。
為保證立面的精細化和數據的準確性,傳統的測繪方法無法滿足里面細節及位置精度要求,文獻[1-9]將三維激光掃描儀應用在城市更新立面改造中,均取得了良好的實用效果。本項目采用法如激光掃描儀進行城市更新立面改造外業數據采集,配套軟件進行數據處理,為達到5 cm的精度要求,需要對數據的獲取和處理進行優化。
本項目數據處理配套軟件采用意大利JRC 3D Reconstructor軟件,JRC(Joint Research Centre)為歐盟委員會在意大利成立的聯合研制中心,該中心開發了JRC 3D Reconstructor軟件,主要用于三維激光掃描數據處理,該軟件使用迭代最近點算法(Iterative Closest Point,ICP)進行點云配準處理,在實際生產中會遇到各種問題,這主要是由于ICP算法本身可能造成的缺陷所致。本文在實際生產過程中,經過多次驗證,針對ICP算法存在的缺陷,提出一些解決辦法,能夠規避一些典型的配準問題,解決實際技術流程中的痛點,為生產實踐及相關學術研究提供一定的經驗和思考。
1 三維激光掃描應用于城市更新立面改造關鍵問題剖析
1.1 方法描述
三維激光掃描儀應用于城市更新立面改造的主要流程如圖1所示。
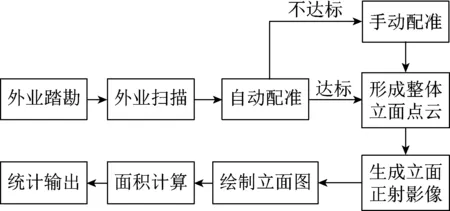
圖1 城市更新立面改造主要流程圖
1.2 JRC點云配準存在的問題及解決辦法1.2.1 存在的問題
該流程中,外業測量由于操作簡單、自動化程度高,人為造成誤差的概率低,除了因環境(如樹木、其他墻面等)遮擋無法獲取完整點云外,在保證科學重疊度的前提下,外業測量一般都能快速順利進行,關鍵技術主要集中在內業處理環節中點云與點云的配準,點云配準處理不好會出現重影、傾斜、倒置等現象,也就無法生成正確的正射影像,無法進行立面繪圖工作。所以,在整個技術流程中,點云的配準至關重要。
JRC點云配準算法采用的是常用的ICP算法。由于該算法存在一定的局限性,故而在點云數據處理中,會導致數據處理成果的精度及處理效率都有所降低,業內學者針對該局限,文獻[10-19]從學術的角度提出了一些改進措施,本文主要從實際應用的角度提出一些改進措施,相對于學術算法上的改進,實際數據操作上的改進更快捷、更具有靈活性,以此作為工程應用的參考。
首先,ICP算法要求兩個點集必須是包含關系,然而在實際掃描過程中,每一站掃描數據都有掃描范圍,兩站之間有一定的距離,兩站之間的點云數有部分重疊,但絕非是完全重疊,即無法滿足算法要求的包含關系。因此,在實際生產中,這就要求相鄰的掃描站之間保證一定的重疊度,但是重疊度并非越大越好,過度的重疊度不僅會造成計算機負擔,還有可能帶來重影以及累計誤差。
其次,ICP 算法迭代,首先需要給定初始值,初始值的選擇很大程度上影響最后的配準精度,如果初始值與真實情況相差較大,最后的配準結果很可能陷入局部最優。在實際生產中,這種情況出現主要表現在ICP配準報告精度顯示較好,但實際點云出現重影、傾斜現象。這就是局部最優造成的,整個點云的配準并未符合要求,只有局部陷入最優解,這種點云無法進行正射影像的制作。
最后,算法中使用一個點集的所有點進行點對搜索,不分點位的全域搜索,導致耗時較長,甚至還會引進錯誤的點對。在實際生產中,主要表現在一棟房屋進行配準的時候,往往由于全域搜索將相鄰房屋點進行錯誤配準,同時,相鄰站之間需要遍歷的無用點過多,造成計算時間長,拉低配準精度等問題。
1.2.2解決辦法
為解決以上出現的自動配準錯誤、配準效率低下、累計誤差等問題,本文基于實際項目驗證,提出分面處理、刪點處理和坐標控制的方法來解決以上問題。
1.2.2.1 分面處理
在城市更新立面改造中,繪制立面圖進行面積計算,只需要獲取整個立面及其附屬設施的相對位置關系,即相對尺寸即可,作為后期微改造及經濟測算的基礎依據,并不需要絕對的坐標信息。
基于此前提,對于7層以上的高層建筑,樓層高,立面附屬設施多,一般而言,激光掃描儀掃描不到建筑物上部,通過協調入戶上樓掃描、到對面樓頂掃描相對面的建筑物上部獲得完整的建筑物點云。但在數據處理時比較耗時,主要原因在于點云配準效果差,以整個建筑體為單位進行拼接時,會出現明顯的錯層現象。
經過實際驗證,采用了分面處理的策略,可以很大程度上規避這樣的問題。分面處理即事先把點云按照建筑物一個面一個面的分組,然后同一個面做自動配準,以面為單位做配準,而不是以整個建筑體為單位,這樣配準的效果更快更好,后期內業處理效率也大大提高。最后所得的成果精度也能保持在厘米級精度。并且通過對比分面處理的配準結果和整棟的配準結果,能夠分析出建筑哪個立面配準誤差較高,從而找到整棟建筑掃描效果稍差的面,反向指導后續外業掃描。
1.2.2.2 刪點處理
對于沿街低矮房屋或者沿街廣告牌的微改造,沿街的一個特點是岔路口比較多,掃描的時候,兩站之間距離稍遠容易丟失同名點,兩站之間距離過小,重疊度能得到保證,但配準效率會低,拼接的任務量大。為了提高拼接的效果和效率,我們在點云拼接之前,先將點云做了刪點處理,只保留所需要的建筑物點云或者需要配準的面片點云,其他點云全部刪除,這樣軟件計算的時候,遍歷的點少了,計算更加快捷,經過刪點處理后自動拼接,處理時間節約了至少30%。刪點的方法,各種情況都適用。
1.2.2.3 坐標控制
在城市更新中,針對留存的古建筑或嶺南特色民居(如祠堂等),除進行建筑立面測繪外,還需要留存三維點云模型,作為歷史文化建筑數字化記錄,為日后查詢、修繕、展示等提供基礎數據。對于要留存三維點云模型的建筑,需要獲取建筑的絕對位置信息,也就需要整棟進行配準,不能采用分面處理的策略。
基于此前提,在利用JRC點云進行配準時,即首先將前兩個點云數據進行配準構成一個整體,然后將第三個點云數據與前面配準好的點云數據進行配準構成一個新的整體,以此類推,得到整個建筑體在統一坐標系下的點云數據。這種方法的缺點在于配準過程中存在誤差,而且由于誤差的累積性和傳遞性,配準結束后配準誤差會放大,最終可能導致建筑物本體發生輕微變形或者說發生嚴重的錯位。
為解決累計誤差的問題,在外業激光掃描,使用全站儀進行標靶點的測量,標靶點一般均勻分布在房子的四個腳點,最后標靶點的坐標可以作為兩個面之間的公共點進行拼接,起到控制全局和減少累積誤差的作用。
2 實驗與分析
針對以上出現的三類問題,選取相關的區域進行論證。本文所有點云數據由廣州市城市更新規劃研究院的法如掃描儀(Focus 3DX330)獲取。該款型號激光掃描儀為一種相位干涉法三維激光掃描儀,測距精可達毫米級,采樣速率最高可達9 760 000點/s,普通分辨率下,每站掃描2′47″,掃描儀集成全球定位系統(Global Positioning System,GPS)接收器,使掃描與后處理相互關聯,快速拼接,適用于測量型應用。
選取廣州市A小區的實驗數據,該小區整片建筑均為6層以上高樓,單棟建筑總長度約為50~90 m,寬度為12~20 m,高度為21~35 m,小區點云如圖2~3所示。

圖2 小區所有原始點云

圖3 單棟原始點云
由表1結果可知,經過分面處理后,每個面的配準精度有所提高,相比于整體配準誤差,分面配準誤差都有所減小。并且可追蹤觀察到具體某個面的誤差情況,例如,房1中面2(南面)誤差最大為3.2 mm,說明整棟房子面2(南面)的原始數據效果最差,定位到房1的實際外業情況,該面與鄰近房屋距離較小,外業掃描空間較小,頂部點云數據稀疏,造成配準難度,導致該面的配準誤差偏大,但總的來說,每個面分面后,配準誤差還是小于分面前的配準誤差,這說明分面處理確實有利于控制每個面的配準誤差。
實驗2進行了刪點處理時間測試(表2),通過對4棟房子的刪點處理,算法在遍歷時間上直接可以跳出刪除的無用點,節省了遍歷時間,從每棟房子節省的時間來看,針對單棟房子,刪點處理能大大節約配準時間,將此處理方法應用于大規模點云數據處理,可大幅度節省工作時間,提高工作效率。
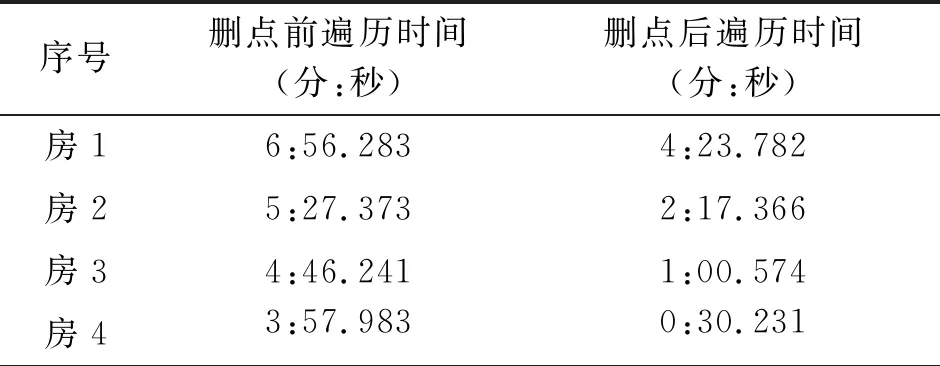
表2 刪點處理時間分析
實驗3進行了坐標控制精度分析(表3),一般進行坐標配準拼接時,會按照順時針或者逆時針進行,在拼接的最后一站往往是誤差最大的站,試驗選取了每個房子最后一站拼接的房頂點的高程作為精度分析點,通過實驗可得,經過標靶點控制累積誤差,房頂點的高程之差最大1.3 cm,最小可達0.4 cm,都在5 cm之內,完全滿足要求。
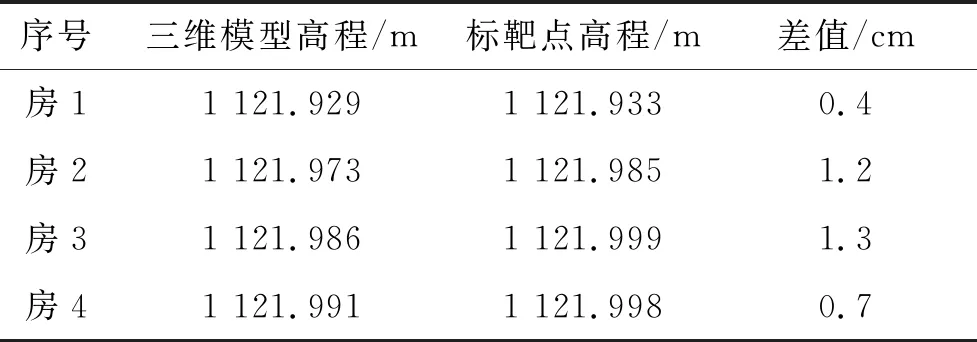
表3 坐標控制精度分析
3 結束語
本文基于三維激光掃描進行了城市更新立面改造方面的研究,探討了面向城市更新立面改造的三維激光掃描關鍵問題,經實驗研究發現,得出以下幾點結論:
(1)將三維激光掃描應用于城市更新能夠達到城市更新對立面改造的精度要求,且具有傳統方法不可比擬的優勢,目前正逐漸應用于城市更新立面改造中。
(2)現有的點云數據處理軟件因為算法本身的限制,或多或少存在一定的弊端,必須要結合實際進行針對性處理改進方能應用于項目生產。
(3)在實際生產中,本文提出的分面處理、刪點處理和坐標控制法能夠提高點云配準效率、縮短點云處理時間、減小累積誤差,有效規避了現有JRC配準算法的缺陷。
猜你喜歡
中學生數理化·自主招生(2022年9期)2022-05-30 10:48:04
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
電子測試(2018年4期)2018-05-09 07:28:12
當代化工研究(2016年9期)2016-03-20 16:22:13
中國慣性技術學報(2015年1期)2015-12-19 13:12:17
計算機工程(2015年4期)2015-07-05 08:28:04
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
聯合國青年技術培訓(2014年7期)2014-04-12 00:00:00
中國質量與標準導報(2014年7期)2014-02-28 22:24:35
