基于TMS320C6678的雷達雜波處理技術
2021-07-28 01:05:48梁璐
數字技術與應用 2021年6期
關鍵詞:方法
梁璐
(中國電子科技集團第二十研究所,陜西西安 710068)
0 引言
雷達信號處理過程對周期信號的處理有很高的實時性要求,以往單核處理器功耗大,處理能力有限,并且在數據運算率和總線傳輸方面均有一定的局限性,盡管多個單核處理器并行處理也能滿足要求,但是眾多的接口交互導致軟件架構過于復雜。多核處理器適用于現代雷達體制,無論是在存儲能力和運算效率等方面更能滿足系統對于實時性和功能的要求。以往眾多雜波抑制方法受限于硬件存儲能力,因此在工程實現中對于雜波圖的應用不多。
本文硬件應用了TI的C66系列8核處理器。TMS320C 6678是基于TI的KeyStone多核架構的高性能定/浮點DSP,主頻可達到1.25GHZ,單核可以提供40GMAC定點計算或者20GFLOP浮點計算能力,可在10W功耗下實現160GFLOP的性能[1],硬件外部掛接4片256M的DDR3,能滿足我們對于大數據量存儲空間的要求。文中主要在此硬件基礎的條件下,實現了一種時域恒虛警處理,也稱雜波圖恒虛警[2]。
1 系統軟件架構設計
基于固態化搜索雷達,掃描范圍大,測量距離遠,且應用場景較多,可用于海事交通,岸島,陸基等。為了滿足實時性要求,本系統硬件選用DSP結合FPGA的架構,充分利用了FPGA的流水處理性能和DSP多核的并行運算性能。FPGA接收A/D采樣數據,做下變頻,經脈沖壓縮處理通過SRIO接口送至DSP,DSP做積累以及雜波處理。這里主要介紹DSP與FPGA之間的通信接口以及所實現的雜波處理方法。
主要軟件功能如圖1所示,FPGA與DSP之間傳輸接口為SRIO,SRIO作為高帶寬、系統級的基于數據包交換的互聯接口,主要應用在芯片與芯片之間以及單板與單板之間,可以提供每秒GByte 的高速數據交互,它是基于內存和處理器總線的設備尋址,具有更低的延時、減少數據包處理的開銷同時可以提高系統帶寬[3]。

圖1 TMS320C6678和FPGA功能劃分Fig.1 TMS320C6678 and FPGA function division
2 雜波處理方法及實現
長期以來通過對時域中海雜波特性變化的分析觀察,其變化相對緩慢,而雜波圖CFAR檢測方法在背景雜波分布均勻和非均勻的情況下均可以穩定工作[4],同時為了解決靜態雜波圖算法設計的不足,我們采用動態雜波圖的方法,不僅能夠根據雷達周邊環境的變化及時更新雜波圖,也能利用非相參積累提高信噪比,更能有效提高檢測性能。
動態雜波圖對于存儲能力的要求高,需要有足夠的存儲區用以存儲每個方位-距離單元的數據,因此硬件上選用了4片256Mb的DDR3。假設雷達的距離單元為m個,方位單元為n個,雜波圖存儲器至少需要一個容量為nm的數據存儲器。由于雷達接收的雜波是一個隨機過程,天線不同的掃描周期所得到的信號強度是時變的,所以,雜波圖的建立是一個不同掃描周期對數據平均的過程。具體步驟如圖2所示:
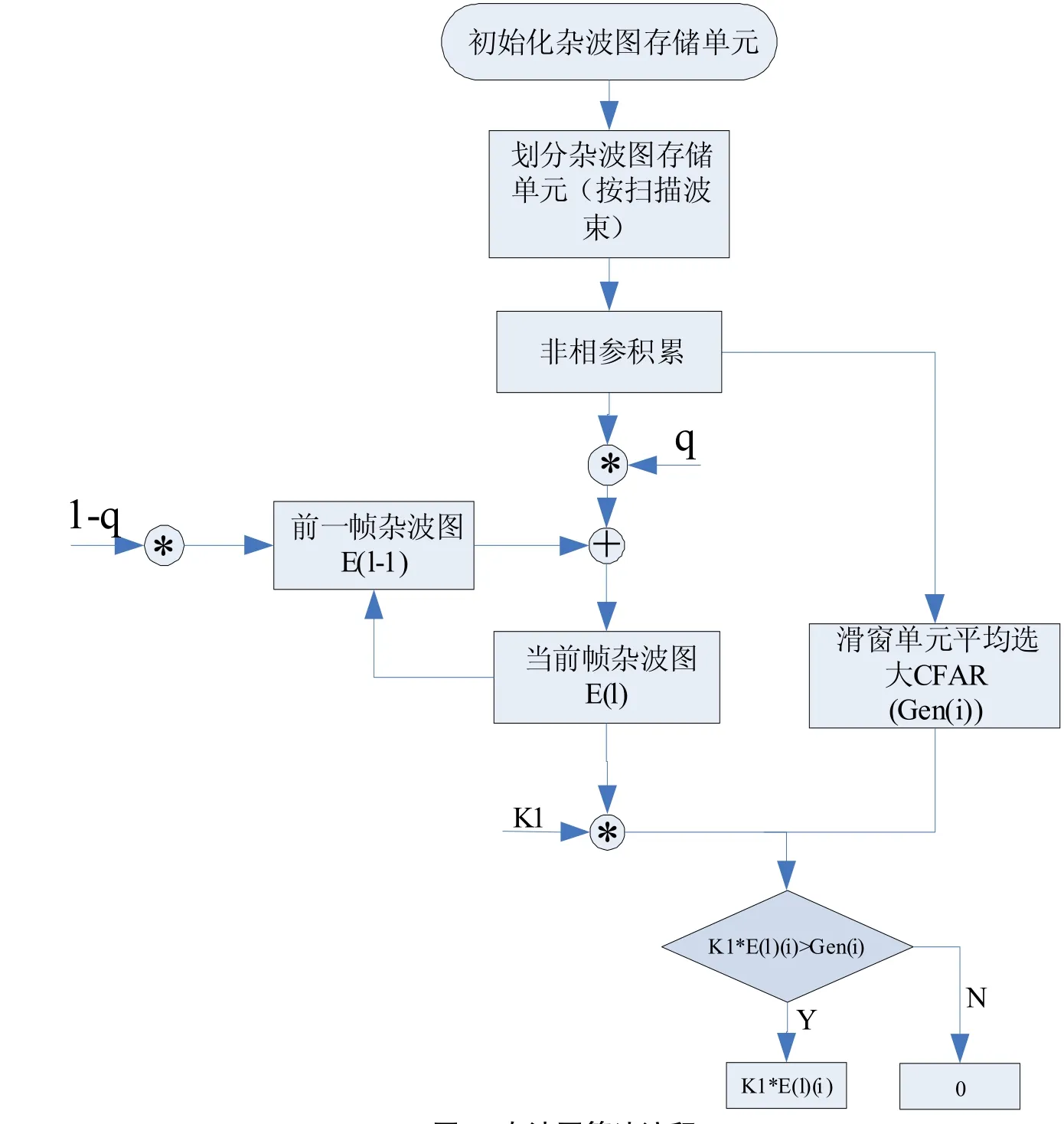
圖2 雜波圖算法流程Fig.2 Clutter map algorithm flow
2.1 初始化雜波圖存儲區
根據回波信號采樣的數據量提前計算存儲雜波圖所需存儲空間大小,分別以多種工作方式為條件將存儲器按天線旋轉一周的掃描方位如圖3所示按方位距離單元的劃分方法,方位和距離單元分別選擇最大數據量的單元數劃分地址存儲空間。
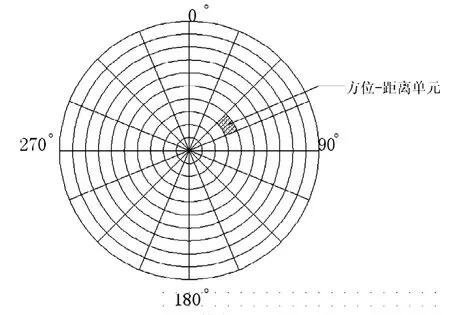
圖3 天線掃描存儲單元劃分方法Fig.3 Antenna scanning storage unit division method
2.2 非相參積累
首先對接收回波信號,經過采樣脈壓之后,做非相參積累。將脈壓后的數據求模結果為sn,m(k),把m個發射周期的數據相加得到Dn,m(l),計算過程參照表達式(1~2):

其中,Re為信號實部,Im為信號虛部,k表示第幾個重復脈沖信號。
2.3 幀間遞歸數據和單元平均選大恒虛警門限
對非相參積累后的數據Dn,m(l)分別進行恒虛警門限計算以及幀間遞歸濾波。
(1)將非相參積累后的數據進行一階遞歸濾波,將前一幀的雜波圖結果與當前幀輸入做數據平均,具體公式如下:

式3中En,m表示n*m個方位-距離單元上的雜波圖,Dn,m表示當前輸入數據,“l-1”表示前一個天線掃描周期,En,m(l-1)表示前一拍的雜波圖數據,“l”表示當前掃描周期,En,m(l)表示當前拍計算的雜波圖。
(2)將非相參積累后的數據采用滑窗的方式進行單元平均選大恒虛警[5]處理計算CFAR門限。首先設置參考單元與保護單元的個數,按照圖4所示,假設參考單元有r個,保護單元有p個,將做完非相參積累后的一個波位上的數據分三段重新排序,如下式(4)至(6):
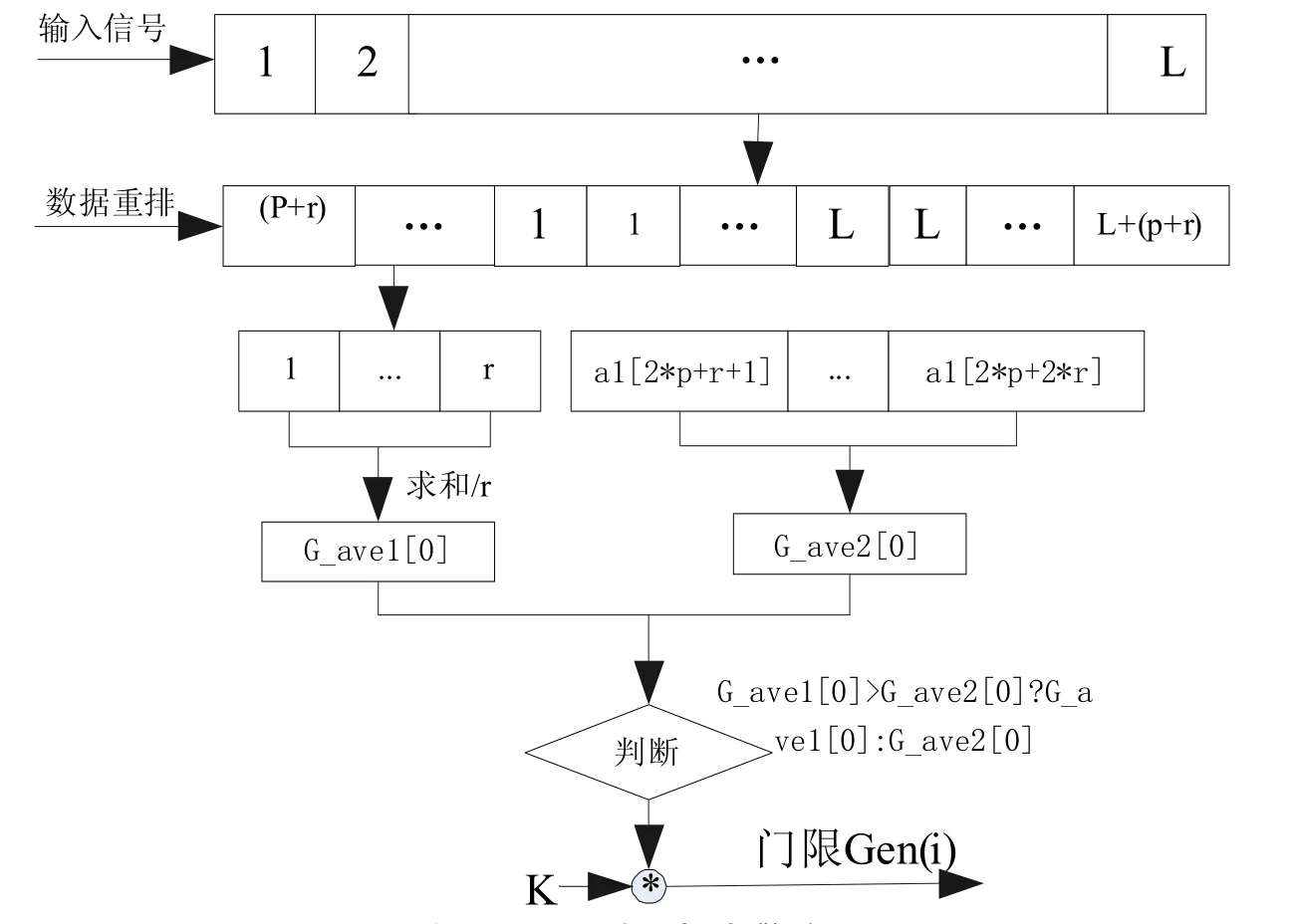
圖4 滑窗單元平均選大恒虛警檢測器結構Fig.4 The sliding window unit averagely selects the structure of the Daheng false alarm detector

其中temp=p+r;p為保護單元個數,r為參考單元個數。
以計算第一個距離單元數據門限為例,參考式(4)排序之后對數組a1做處理,用前面r個數據求和平均G_ave1[0]= a1[i]/r與a1[2*p+r+1]起始的r個數據求和平均后的值G_ave2[0]= a1[i]/r比較,選擇大的值乘以比例因子K得到最終的門限值Gen[0];第二個單元的門限求解在第一個單元求和 a1[i]的基礎上減去前一個單元值a1[0],加上排序后a1[r]單元的值求平均得到當前單元的G_ave1[i]和G_ave2[i]即
比較兩者選出較大的值作為恒虛警門限Gen[1]。各方位-距離單元的門限值依次按公式(7)~(8)計算。
2.4 經雜波處理后數據的選擇性輸出
利用單元平均選大恒虛警解算出的CFAR門限值與存儲的雜波圖數據比較選出較大值即K1*E(l)(i)>Gen(i)?K1*E(l)(i):Gen(i)的結果作為門限值與當前一幀同一方位-距離單元上的數據進行比較,最終將大于門限的值原樣輸出,小于門限的值輸出0。
工程應用中常采用一種名為雜波輪廓圖[6]的方法,此方法按照距離-方位單元來存儲雜波存在與否的標志“1”或“0”。作用是為了選擇性輸出控制信號檢測通道,其中“1”代表存在雜波,選取MTD(或MTI)相參處理支路的輸出,“0”代表不存在雜波,選取正常處理支路的輸出,這樣既降低了運算量,同時也降低了對所有數據做MTD(或MTI)檢測時產生的非必要的性能損失。然而這種方法降低了運算量和對存儲空間的要求,但是對于回波畫面的顯示效果較為粗略,對于慢速小目標的檢測性能不夠明顯。
3 試驗結果
試驗測試,將雷達架設在一定高度,對海事交通進行探測,P值定為4,即雜波圖在4幀之后穩定消除虛假目標和雜波,圖5中顯示為未做雜波圖的非相參積累的原圖,圖中雜波分布雜亂,不容易分辨目標,圖6為通過4幀恒虛警雜波圖刷新后的處理結果,圖中對試驗現場周邊的地物雜波等零速雜波起到抑制作用,同時結合GO-CFAR(單元平均選大恒虛警)檢測有利于對動目標的提取,對后續目標的點跡航跡處理效果起到至關重要的作用,同時對畫面的檢測效果更好。

圖5 原始回波顯示Fig.5 Original echo display
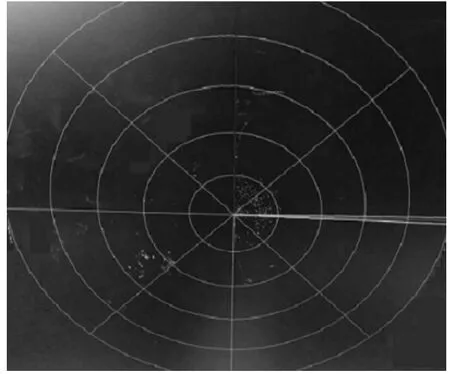
圖6 雜波圖處理后的回波Fig.6 Echo after clutter map processing
在TMS320C6678硬件平臺上,按照量程的選擇,從幾公里到幾百公里,選擇處理的數據量長度不同,對于百公里以上幾萬點的浮點數處理應用了多核并行處理功能以及多核的核間中斷功能,保證了功能性和實時性指標要求。
4 總結
通過上述實驗結果,可得結論:結合硬件處理芯片TMS320C6678的高速處理性能,同時又可滿足對存儲能力要求較高的工程應用需求,達到穩定的處理效果,在雷達工程計算中較其他同類產品,在運算速度和存儲量兩方面占據相對優勢,在雷達領域以及對運算數據量要求較高的其他領域中具有很高的評價,恒虛警雜波圖處理方法抑制零速雜波結合恒虛警檢測動目標,對于相對穩定海情下海雜波也有一定的抑制,同時也存在一個問題,此方法在消除靜止目標的過程中將慢速小目標有所損失,因此對于由海雜波的不穩定性所帶來的對于慢小目標的問題在工程應用中還需要繼續研究。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
