基于線性調頻連續波雷達的呼吸信號檢測技術研究*
2021-07-28 01:05:46劉楚妍楊天虹王昕宇劉宇
數字技術與應用 2021年6期
劉楚妍 楊天虹 王昕宇 劉宇
(沈陽航空航天大學,遼寧沈陽 110136)
0 引言
近年來,雷達技術在生產、生活等各個方面給人們提供了極大地便利。相較于傳統接觸式的生命體征檢測方法,非接觸式雷達傳感器在災難救援、反恐響應和緊急搜索等日常領域有著更廣泛的應用。本文采用LFMCW雷達進行人體非接觸生命體征檢測[1],LFMCW雷達功耗低,具有較高的分辨率和系統集成度,且其目標信息保存在接收相位中,硬件處理相對簡單,具有不可替代的優勢。
1 調頻連續波雷達原理
LFMCW雷達系統包括信號發生器、發射天線、接收天線、濾波器和模數轉換器等,圖1為LFMCW雷達系統的簡化框圖。
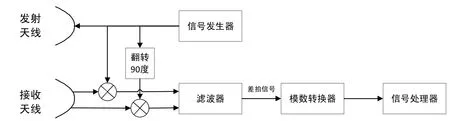
圖1 LFMCW雷達系統簡化框圖Fig.1 Simplified block diagram of LFMCW radar system
LFMCW雷達發射由信號發生器產生的線性調頻連續波信號,雷達信號在遇到目標時被反射回來。正交接收機負責捕獲回波信號并與發射信號正交混合,通過濾波器后得到差拍信號,差拍信號再經模數轉換器后進行后續信號處理。
2 雷達信號建模
一個LFMCW波形周期內發射信號的數學表達式可以表示為

其中ATX是發射信號的幅度,fc是發射信號的起始頻率,θ(t)是相位噪聲,B是帶寬,Tc是鋸齒波信號的寬度,BTc代表發射信號頻率的變化率。
假設R(t)是胸部的運動位移,d0是雷達傳感器到人體的距離,則從胸腔到雷達的距離x(t)=R(t)+d0,時間延遲td=2x(t)c,其中c為光速。記ARX為接收信號的幅值,則接收信號的表達式為

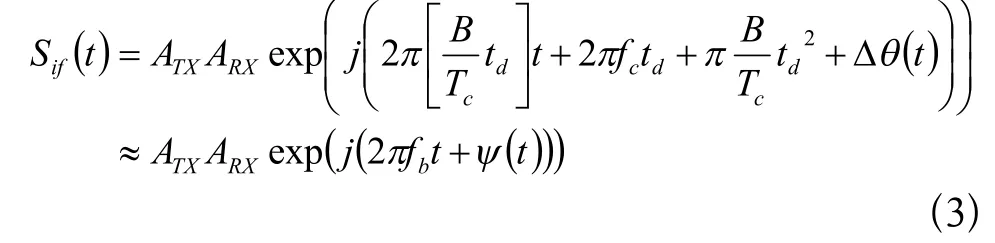
回波信號和傳輸信號由兩個正交的I/Q通道混合,然后通過低通濾波器得到差拍信號Sif(t),差拍信號的表達式為:
3 信號處理流程
人類呼吸信號檢測的系統過程包括三個步驟: 目標定位、相位提取、估計呼吸頻率。對差拍信號進行采樣后,對每個線性調頻信號進行距離FFT得到一個矢量,并將其逐行放入矩陣中,構造出N行(即N個連續調頻波)的距離-時間矩陣M[n,m],其中 1≤ n ≤N,1≤m≤M,M為采樣數[2];具體流程如下:
(1)在原始數據矩陣的每一行上執行一次快速傅里葉變換(FFT),得到距離-時間矩陣M[m,n];
(2)確定人體目標,對目標信號進行相位展開,并保證相位演化的絕對值不大于π;
(3)使用快速傅里葉變換計算呼吸信號頻率。
4 實驗環境設置及結果
本文將使用合肥華科電子技術研究所開發的HKH-11C接觸式呼吸傳感器作為標準結果進行參照。雷達系統使用中心頻率為25GHz,帶寬為2GHz的調頻連續波信號進行檢測。實驗過程中,受測者坐在距離雷達1m的位置,且保持平穩呼吸。呼吸傳感器和LFMCW雷達所得的呼吸幅頻圖如圖2所示。
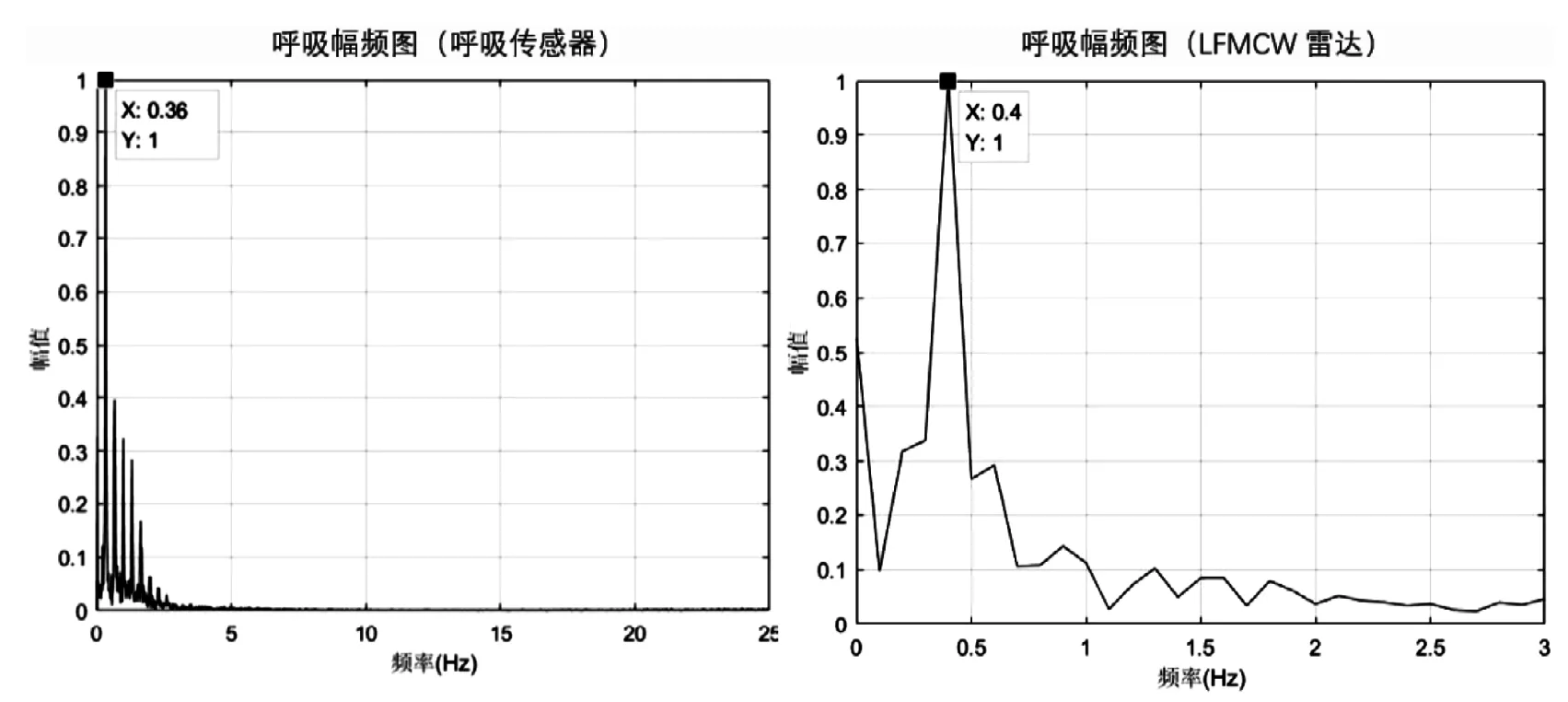
圖2 呼吸檢測結果Fig.2 Breath test results
由圖2可知,LFMCW雷達呼吸檢測結果為24次/分,與呼吸傳感器所測得的呼吸頻率相吻合,證明了本文方法的準確性。
5 結論
非接觸式生命體征監測是短程雷達的一個新興應用,LFMCW 雷達體系結構簡單,利用基于相位測量獲得的目標的距離歷史,解調過程大大簡化了其硬件實現,并且能夠從回波信號準確有效的提取出呼吸信號,具有重要的理論價值和現實意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
