主動調頻對大容量風電機組載荷靈敏度響應分析
2021-07-26 05:55:12李成晨劉曉輝劉二恩
可再生能源 2021年7期
關鍵詞:策略
李成晨,劉曉輝,卓 然,宋 珂,劉二恩
(許昌許繼風電科技有限公司,河南 許昌 461000)
0 引言
隨著風力發電成為主流發電形式,目前已有很多國家對風電場參與電網系統調頻控制的并網運行發布了導則或規程。如加拿大電力供應商要求在并網電力系統出現調頻需求時,風電場應至少提供5%額定功率的調頻備用容量,持續時間不低于20 s[1]。同時德國、英國、丹麥和瑞典等國也提出了相關要求[2]。
國內外很多學者對風電機組主動參與電網調頻進行了深入的研究。文獻[3]利用變頻器雙閉環控制回路將頻率變化率作為控制量,使風電機組實現模擬慣量控制,因電流環控制參數過于敏感導致控制穩定性很難保證。文獻[4]在雙饋電機的轉子側增加輔助功率控制環,將風輪轉子與電網頻率波動進行耦合,利用轉子釋放慣性動能短時間實現功率支撐。文獻[5]通過將風電機組轉速扭矩曲線運行點平移的方法實現降載預留調頻備用運行,實現了預留備用參與調頻。
本文對主動調頻策略下機組載荷響應進行了研究,分析具有電網頻率主動支撐功能的風電機組載荷響應,提出在保證機組安全前提下風電機組電網頻率支撐的邊界支撐次數。
1 主動調頻策略
主動調頻策略的本質是通過控制變流器模擬同步發電機的工作原理[6],從而獲得類似同步發電機的運行特性,實現類似同步發電機的有功調頻與無功調壓功能。有功-頻率控制實際上是模擬同步發電機的調速器[7],用以表征有功功率和系統頻率的下垂特性,通過檢測功率差ΔP來控制虛擬機械轉矩輸出而調節頻率,并采用主動調頻阻尼系數來描述頻率發生單位變化時的輸出功率變化量,其控制框圖如圖1所示。
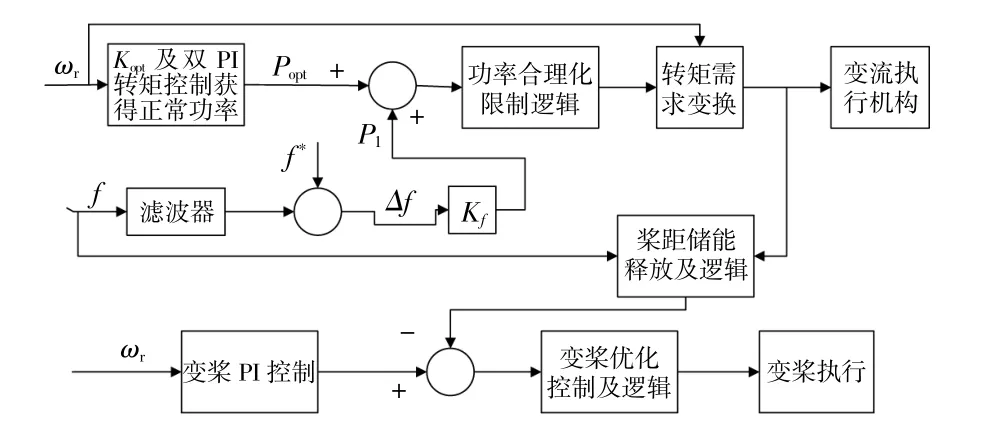
圖1 有功-頻率控制框圖Fig.1 Active power-frequency control block diagram
圖中,ωr,Popt,P1,f,f*,Δf和Kf分別為風電機組轉速、正常運行功率、需要調節的有功功率、電網頻率、電網頻率參考值、電網頻率與參考值差值和一次調頻系數。控制邏輯為風電機組采集f,計算出與f*間的Δf,Δf乘Kf獲得P1,將有功功率加至當前風機可發功率Popt上,計算總的功率需求P,轉換為轉矩需求給變流器強制執行。風電機組主控系統控制風機槳距、轉速和扭矩,實現有功調頻功能。主動調頻分為針對電網頻率變化的一次調頻控制和電網頻率變化率的慣性調頻控制,本文主要對一次調頻策略參數進行仿真分析。
2 風電機組主動調頻策略仿真方案
2.1 主動調頻策略仿真因素水平設計
一次調頻控制依據的是電網頻率的變化,采用下垂控制計算支撐功率值,并與風機實時功率進行疊加,計算得出功率調節目標值,功率變化ΔP為

式中:Δf為電網頻率變化量;fN為電網基準頻率;PN為風電機組額定功率;Kf為一次調頻系數。
對電網頻率的支撐過程如圖2所示。
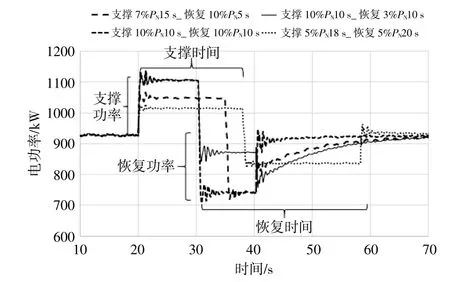
圖2 一次調頻策略仿真變量示意Fig.2 The simulation variables of primary frequency modulation strategy
在支撐過程中,電網頻率跌落幅值和變化時間不同均會要求機組呈現不同的支撐情況,即跌落幅值要求不同的支撐功率,電力頻率跌落時間對應支撐時間。恢復策略表征為風電機組完成要求支撐功能后功率恢復正常運行的一種方法,本文主要采用以某一固定功率保持一段時間后恢復正常。各仿真變量因素水平見表1。
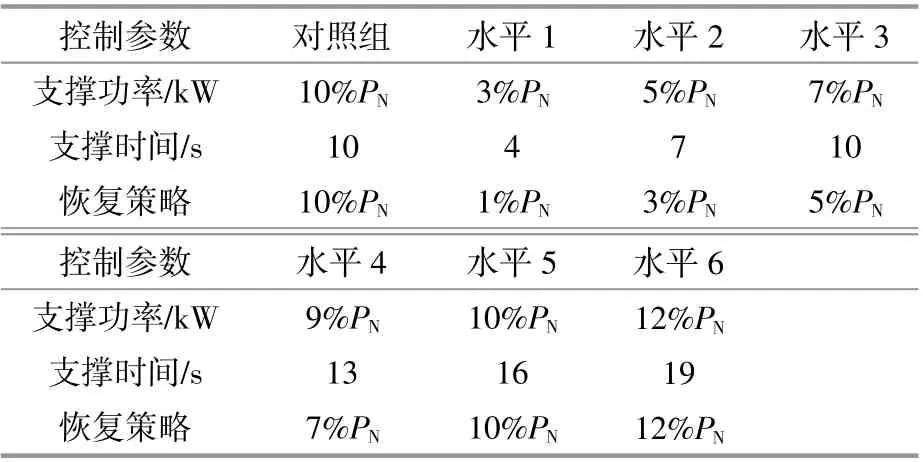
表1 一次調頻調頻控制參數因素水平Table 1 Primary FM control parameter level
2.2 載荷仿真方案設計
以某公司生產的2 000 kW變速變槳全功率風電機組為例進行仿真分析,采用風電行業載荷通用仿真軟件GH Bladed,將主動調頻策略內置于外部控制器中,模擬不同電網條件下機組載荷響應,該仿真方法與文獻[8]相近。仿真過程中采用正常風廓線NWP風模型仿真風電機組正常運行情況下的極限載荷響應,風速為5~20 m/s,風速步長為1 m/s;采用正常湍流風NTM風模型計算風電機組正常發電狀態下的疲勞載荷響應,風速從切入到切出,風速步長為2 m/s,風種子為12個。
2.3 載荷響應分析評價指標
(1)極限載荷
極限載荷為采用時間序列載荷的絕對值最大值。
(2)等效疲勞載荷
等效疲勞載荷Leq采用經典雨流計數原理下某等效應力循環次數下獲得的等效載荷水平[9]。
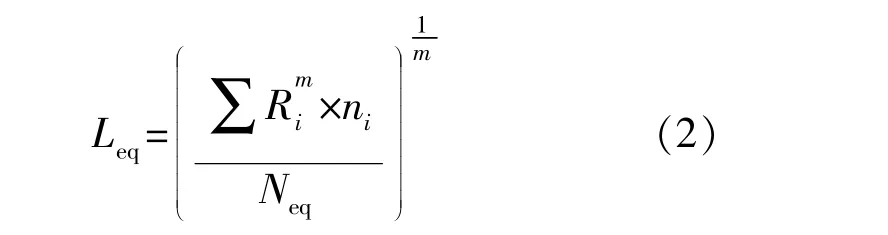
式中:Ri為第i個級別的應力幅值;ni為第i個級別的應力循環次數;m為斜率值,文中m=4;N為等效應力循環次數。
(3)敏感度系數
本文引入敏感系數E準確評估主動調頻策略參數與風電機組主導載荷的相關性[10],E越高表明該參數的變化對載荷產生的影響越大。

式中:ΔF為不確定因素F的變化率,%,本文指調頻策略參數的變化率;ΔA為因素F變化為ΔF時目標載荷的變化率,%。
(4)邊界電網支撐次數分析
將不同支撐次數的調頻策略對風電機組產生的疲勞疊加至機組疲勞載荷中,計算機組等效疲勞載荷,迭代支撐次數直至機組計算等效疲勞載荷達到機組設計載荷,以此時電網支撐發生次數為邊界支撐次數。
3 風電機組載荷響應分析
風電機組極限響應情況采用葉根彎矩Mxy、輪轂扭矩Mx和彎矩Myz、偏航軸承彎矩Mxy和塔底彎矩Mxy作為載荷目標;疲勞載荷選擇葉根Mx和My、輪轂Mx和My、偏航軸承My和塔底My作為目標載荷,評估不同調頻策略下的機組疲勞載荷響應[11]。
采用仿真載荷與未啟用調頻策略時載荷相比的方法對數據進行歸一化處理。
3.1 不同電網支撐功率下風電機組載荷響應分析
(1)載荷響應分析
不 同 支 撐 電 網 功 率3%PN,5%PN,7%PN,10%PN,12%PN和14%PN下機組極限載荷與無主動策略時載荷比例值見圖3,載荷敏感系數見表2。
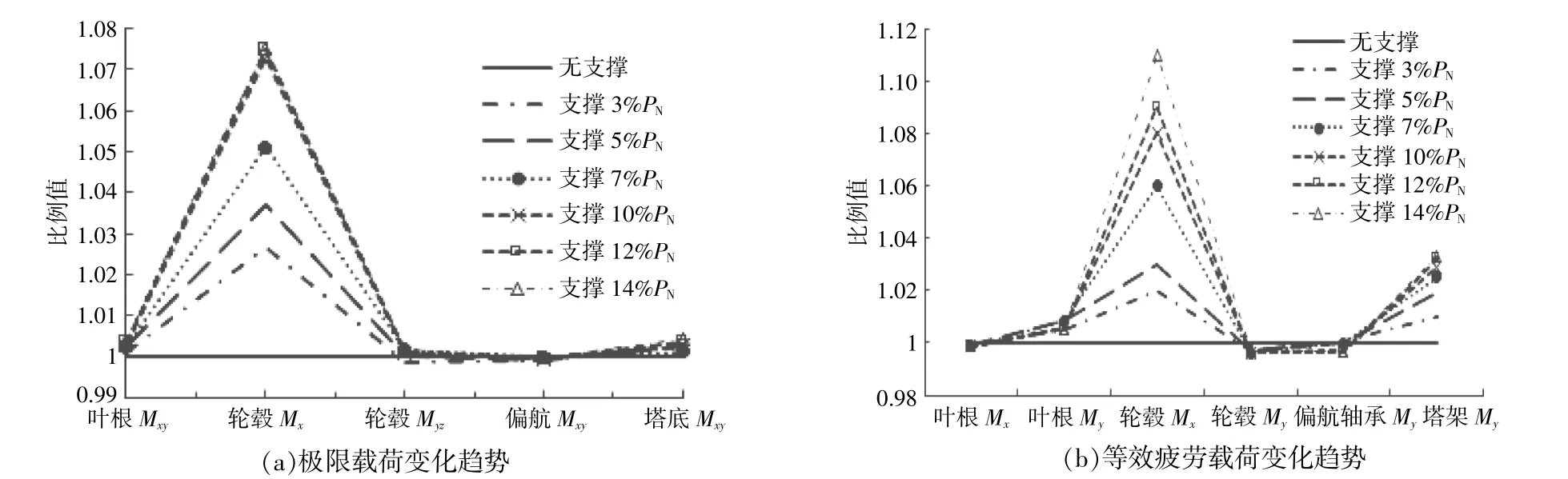
圖3 不同支撐功率下風電機組載荷響應Fig.3 Load response of wind turbine under different supporting power

表2 不同支撐功率策略下風電機組載荷敏感系數Table 2 Table of load sensitivity coefficients under different supporting power strategies
由表2可知,當風電機組向上支撐電網過程中,通過增加發電機扭矩強行支撐,發電機轉速降低,傳動鏈扭矩上升,支撐過程中對輪轂Mx影響較大,極限達到7%,疲勞11%,其他方向載荷影響比較小。
各部件極限敏感系數、疲勞載荷敏感系數中,輪轂中心Mx方向最大,在10%PN支撐功率范圍內,隨著支撐功率的增加敏感度明顯提高,當支撐功率為10%PN時達到最大值;當支撐功率高于10%PN時,通過強加扭矩的方法增加支撐功率作用不明顯,在滿足電網支撐要求下,盡可能選擇較低的支撐功率可以降低機組載荷波動;從敏感度分布分析,當支撐功率為7%PN以內時,載荷敏感系數較低,可以抑制機組載荷的上升和波動速度。
(2)邊界電網支撐次數分析
極限支撐次數如表3所示,隨支撐功率的增加,邊界電網支撐次數由每天350次降低至155次,支撐功率大于7%PN后,機組邊界支撐次數迅速降低。
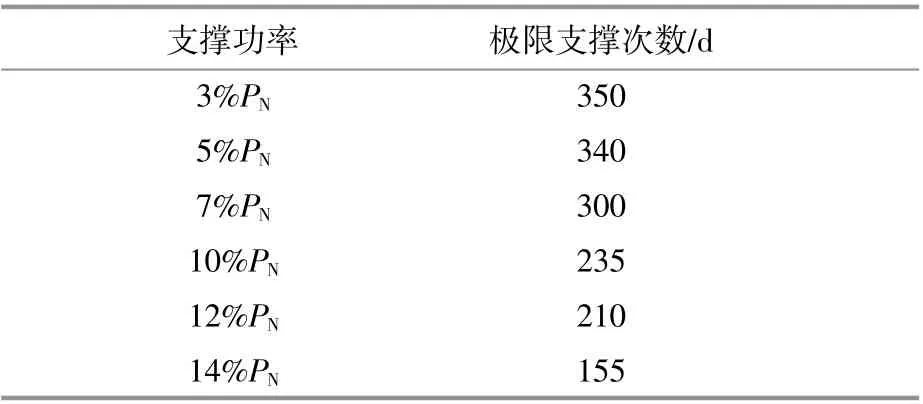
表3 不同支撐功率策略下風電機組邊界支撐次數Table 3 The boundary support times of wind turbine
3.2 不同電網支撐時間下風電機組載荷響應分析
(1)載荷響應分析
不同支撐時間(4,7,10,15,20 s和25 s)下機組極限、疲勞載荷與無支撐策略情況下的比例值如圖4所示。
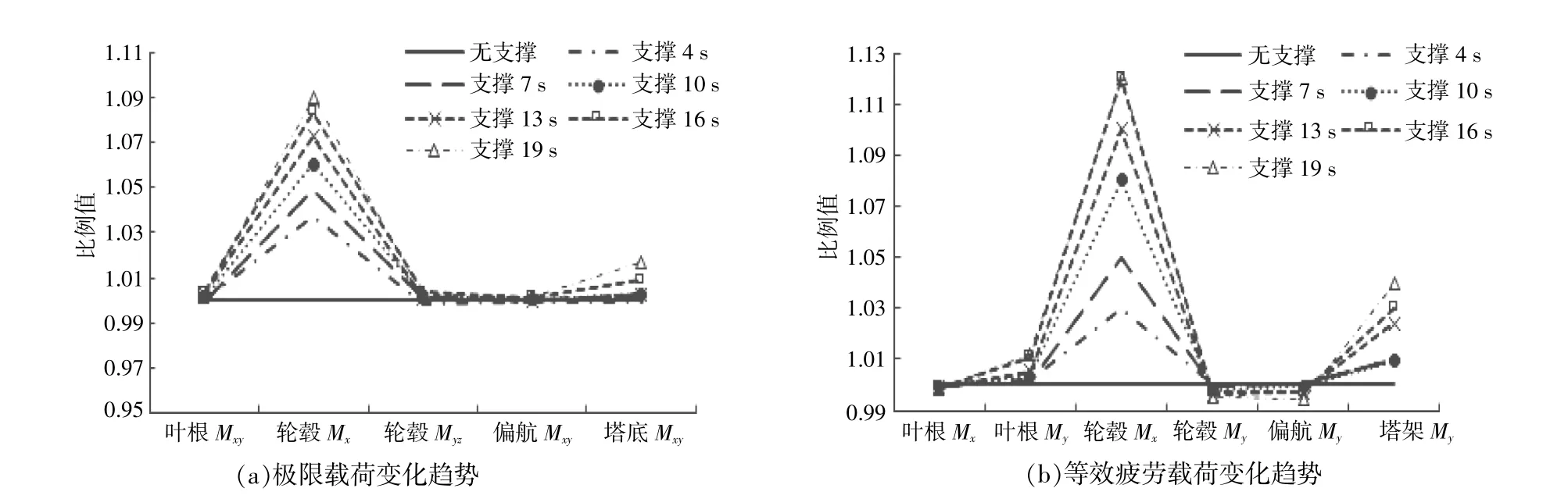
圖4 不同支撐時間下風電機組載荷響應Fig.4 Load response under different supporting time
由圖4可知:電網支撐過程中,隨支撐時間的增加,輪轂中心Mx明顯增加,這是因為增加發電機扭矩強行支撐電網會使發電機轉速降低,導致傳動鏈扭矩上升;隨支撐時間的增加,塔底和輪轂中心My和Mz緩慢增加,這是葉尖速比向更大推力方向移動所導致的。
不同支撐時間下風電機組載荷敏感系數見表4。輪轂中心Mx方向的載荷敏感度最大,且隨著支撐時間的增加敏感度明顯提高。當極限載荷為16s時,達到最大值5.3%,當疲勞載荷為19 s時,達到最大值14.5%,10~16 s時敏感系數基本穩定。因此,支撐時間在10 s內有利于機組平穩運行。
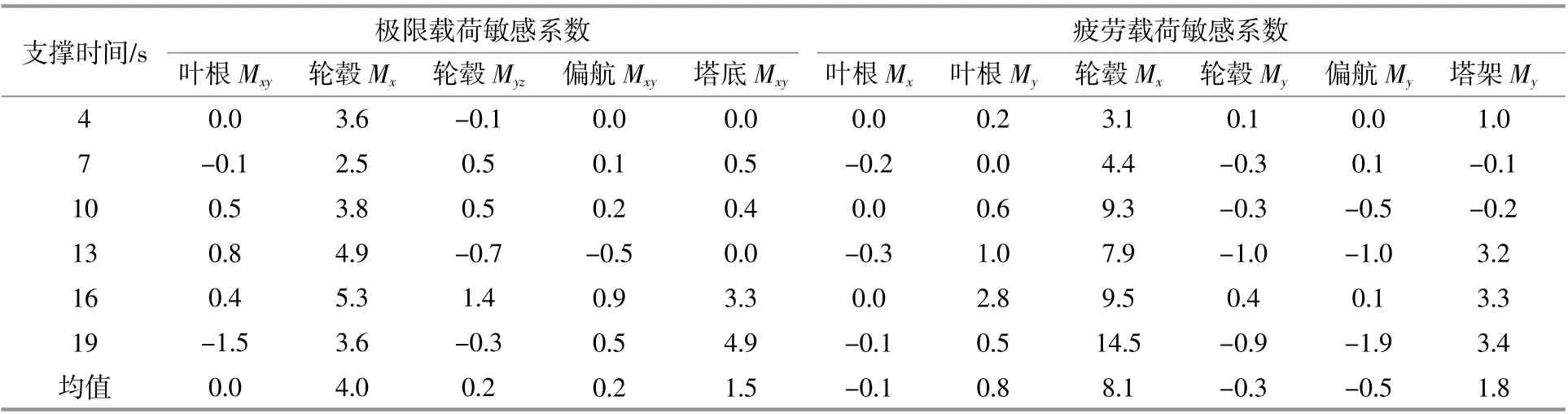
表4 不同支撐時間下風電機組載荷敏感系數Table 4 Load sensitivity coefficient for different support time
(2)邊界支撐次數分析
隨電網支撐時間的增加,在機組機械載荷約束范圍內,邊界電網支撐次數由每天275次降低至115次。不同支撐時間策略下風電機組邊界支撐次數見表5。由表5可知,支撐時間大于7 s后,機組載荷波動增加,邊界支撐次數迅速降低。
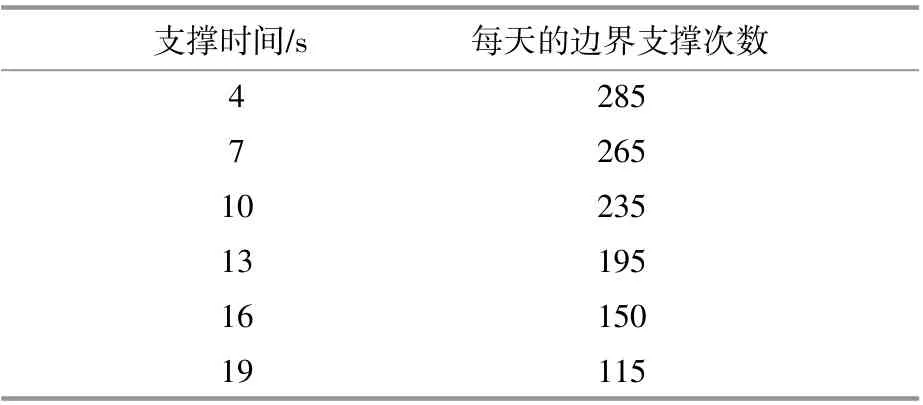
表5 不同支撐時間策略下風電機組邊界支撐次數Table 5 The boundary support times of wind turbine
3.3 不同恢復策略下風電機組載荷響應分析
風電機組電網支撐結束后或者電網頻率恢復時,風電機組應該以一定的恢復策略完成功率恢復。本文首先將功率恢復到某一設定功率保持一段時間,然后恢復到正常電網功率。不同設定恢復功率下風電機組載荷波動和沖擊情況如下。
(1)載荷響應分析
恢復功率為1%PN,3%PN,5%PN,7%PN,10%PN和12%PN的機組極限載荷和疲勞載荷與無支撐策略情況下的比例值如圖5所示。
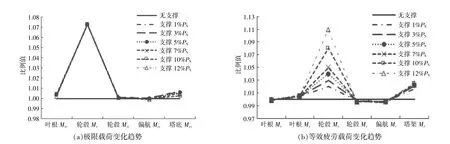
圖5 不同恢復功率下風電機組載荷響應Fig.5 Load response under different recovery power
表6為不同恢復功率策略下風電機組載荷敏感系數表。由表6可知:不同恢復功率對機組極限載荷無影響;疲勞載荷只在傳動鏈Mx方向具有敏感性,達到5.8%;當恢復功率為5%PN以下時,載荷敏感度較低。
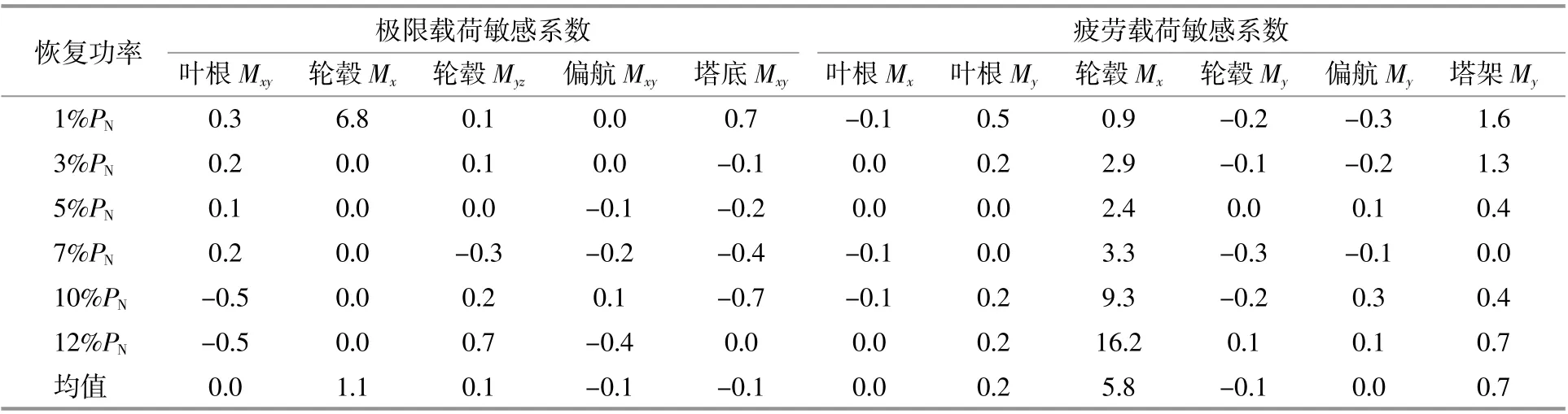
表6 不同恢復功率策略下風電機組載荷敏感系數Table 6 Load sensitivity coefficient for different recovery power
(2)邊界支撐次數分析
隨電網恢復功率的增加,邊界電網支撐次數由每天285次降低至180次(表7),恢復功率高于10%PN后,機組載荷波動增加,邊界支撐次數迅速降低。
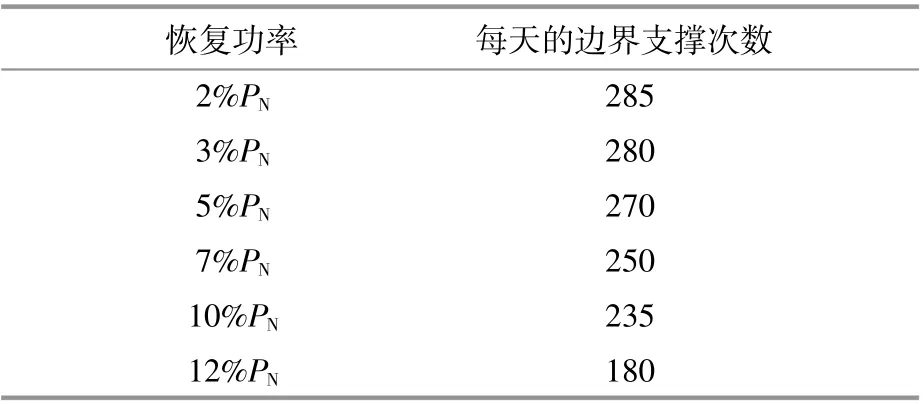
表7 不同恢復功率策略下風電機組邊界支撐次數Table 7 The boundary support times of wind turbine
4 結論
本文對不同電網支撐功率、支撐時間及恢復策略下各控制參數進行了單因素對比仿真試驗,分別從極限載荷、1 Hz等效疲勞載荷、極限和疲勞敏感系數、邊界支撐次數等方面評估了電網支撐過程中風電機組各部件載荷變化情況,主動調頻策略對機組傳動鏈Mx方向有較大的影響,對其他部件載荷影響較小,通過在機組機械載荷約束下分析傳動鏈Mx與主動調頻策略參數的相關性,獲得如下結論。
①傳動鏈極限Mx比無調頻策略情況上升了3%~8%;1 Hz下等效疲勞載荷比無調頻策略情況下上升了2%~12%;極限敏感系數為1.1%~4%,疲勞敏感系數為5%~9%;在該研究機組機械載荷約束下每日邊界支撐電網次數為115~350次。
②結合極限和疲勞載荷與無電網調頻策略下增加的比例和載荷敏感系數確定主動調頻較為合理的參數范圍:支撐功率小于7%PN;支撐時間小于10 s;當恢復功率保持值為5%PN時,機組傳動鏈載荷波動敏感度最小,對機組載荷最有利。
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:42
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
小學生作文(低年級適用)(2018年9期)2018-10-08 02:29:48
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:10
數學大世界(2018年1期)2018-04-12 05:39:14
幸福(2017年18期)2018-01-03 06:34:53
中國衛生(2016年8期)2016-11-12 13:26:50
