直升機多源信息融合仿真系統(tǒng)設(shè)計
2021-07-21 09:05:48強靜雅
火控雷達技術(shù) 2021年2期
王 琳 強靜雅 黃 海
(陸軍航空兵學院陸軍航空兵研究所 北京 101121)
0 引言
武裝直升機是低空超低空戰(zhàn)場上重要的突擊力量,主要用于對地面裝甲、輕裝甲、步兵戰(zhàn)車目標以及低空范圍內(nèi)直升機、無人機目標實施攻擊。獲取精確一致的目標信息是實施火力打擊的前提。目前,武裝直升機主要通過火控雷達、光電系統(tǒng)、數(shù)據(jù)鏈、地理信息系統(tǒng)等獲得目標信息。其中,火控雷達作用距離遠,搜索效率高,具備多目標跟蹤能力,但同時存在長時間開機易于暴露,目標識別能力相對較低等不足;光電系統(tǒng)探測識別精度高,隱蔽性好,但由于視場范圍有限,目標搜索效率相對較低;數(shù)據(jù)鏈和地理信息系統(tǒng)等外部數(shù)據(jù)難以直接用于機載火控系統(tǒng)進行目標瞄準,需要完成坐標轉(zhuǎn)換、時間對準等數(shù)據(jù)處理,才能實現(xiàn)與火控雷達、光電系統(tǒng)等配合使用。
多傳感器信息融合與管理控制是提高直升機綜合探測能力和戰(zhàn)場感知能力的有效手段。利用多傳感器信息融合技術(shù),可以彌補單一傳感器在探測識別目標能力上的不足,為直升機平臺提供精確一致的目標數(shù)據(jù)。利用多傳感器管理控制技術(shù),可實現(xiàn)火控雷達、光電系統(tǒng)等傳感器的協(xié)同配合,提高復雜環(huán)境下目標探測識別效率,縮短OODA作戰(zhàn)反應(yīng)時間。
國內(nèi)有關(guān)學者在機載多源信息融合和傳感器管理控制方面開展了大量研究,文獻[1]結(jié)合航電系統(tǒng)傳感器數(shù)據(jù)特點及信息融合需求,提出了基于修正JDL模型和數(shù)據(jù)融合樹的體系結(jié)構(gòu)設(shè)計思想。文獻[2]圍繞機載信息融合的典型需求和應(yīng)用現(xiàn)狀,提出了適合未來作戰(zhàn)飛機的動態(tài)信息融合體系機構(gòu),研究了時間空間配準及目標狀態(tài)估計的方法。文獻[3]提出了一種復雜戰(zhàn)場環(huán)境下機載雷達/紅外融合探測控制與跟蹤方法,給出了協(xié)同探測傳感器控制策略。以上成果為直升機多源信息融合研究提供了寶貴經(jīng)驗,開拓了研究思路。
本文針對直升機載多傳感器的性能特點和作戰(zhàn)過程低截獲的要求,設(shè)計了一種信息融合仿真系統(tǒng),給出了傳感器協(xié)同探測的方法。該系統(tǒng)在融合處理火控雷達、數(shù)據(jù)鏈、地理信息系統(tǒng)等數(shù)據(jù)的基礎(chǔ)上,利用融合后的目標信息引導光電系統(tǒng)進行協(xié)同探測,實現(xiàn)對目標的快速精確瞄準。該方法可提高直升機多源信息利用效率,降低火控雷達探測照射時間,獲得優(yōu)良的低截獲性能。
1 直升機多源信息融合仿真系統(tǒng)
1.1 仿真系統(tǒng)組成和功能
直升機多源信息融合仿真系統(tǒng)由火控雷達數(shù)據(jù)模擬分系統(tǒng)、數(shù)據(jù)鏈數(shù)據(jù)模擬分系統(tǒng)、地理信息系統(tǒng)數(shù)據(jù)模擬分系統(tǒng)、直升機多源信息融合分系統(tǒng)、載機平臺數(shù)據(jù)模擬分系統(tǒng)、光電系統(tǒng)數(shù)據(jù)解算分系統(tǒng)和顯示模擬分系統(tǒng)等組成,如圖1所示。
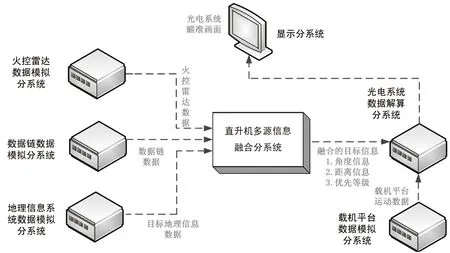
圖1 直升機多源信息融合仿真系統(tǒng)組成
直升機多源信息融合分系統(tǒng)用于目標信息融合處理、多目標威脅分析等。火控雷達數(shù)據(jù)模擬分系統(tǒng)用于生成雷達目標信息。數(shù)據(jù)鏈數(shù)據(jù)模擬分系統(tǒng)用于生成數(shù)據(jù)鏈的目標信息。地理信息系統(tǒng)數(shù)據(jù)模擬分系統(tǒng)用于生成目標的地理位置信息。光電系統(tǒng)數(shù)據(jù)解算分系統(tǒng)用于目標瞄準信息解算,計算目標瞄準線中心位置,并根據(jù)瞄準線偏差確定光學系統(tǒng)探測視場。載機平臺模擬分系統(tǒng)用于生成直升機運動數(shù)據(jù)。顯示分系統(tǒng)用于生成光電系統(tǒng)的目標探測與瞄準畫面。
1.2 仿真系統(tǒng)軟件框架
直升機多源信息融合仿真系統(tǒng)由仿真系統(tǒng)總控模塊、數(shù)據(jù)生成模塊、數(shù)據(jù)融合模塊、數(shù)據(jù)解算模塊、數(shù)據(jù)顯示模塊以及通信網(wǎng)絡(luò)等組成,如圖2所示。
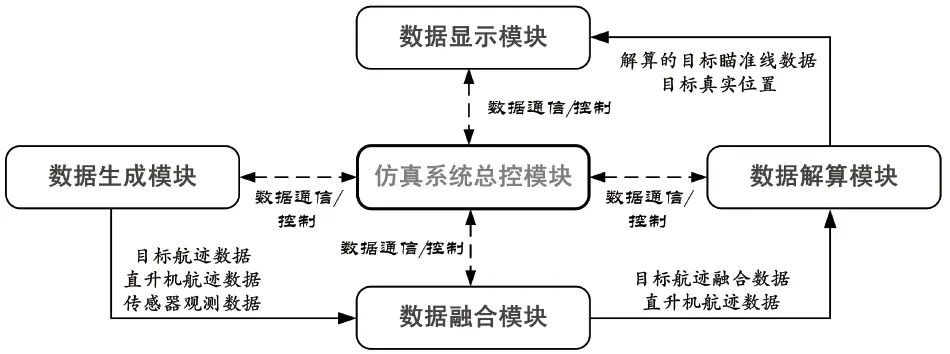
圖2 仿真系統(tǒng)軟件框架
仿真系統(tǒng)軟件采用模塊化設(shè)計方法,建立軟件設(shè)計規(guī)范和約定,制訂接口控制協(xié)議,劃分軟件項目,分解軟件模塊,完成編碼、單元測試和仿真系統(tǒng)軟件綜合。根據(jù)直升機多源信息融合的需求,獨立開發(fā)數(shù)據(jù)生成模塊、數(shù)據(jù)融合模塊、數(shù)據(jù)解算模塊和數(shù)據(jù)顯示模塊,各模塊之間通過內(nèi)存共享技術(shù)進行數(shù)據(jù)通信。在系統(tǒng)軟件設(shè)計開發(fā)過程中,全面描述各模塊的功能與接口要求、模型和算法、運行時序、輸入/輸出要求等。
系統(tǒng)總控模塊是仿真系統(tǒng)的“總控臺”,它管理控制整個仿真系統(tǒng)的運行,啟動仿真流程,調(diào)用其它各模塊。系統(tǒng)總控模塊的主要功能有:
1)提供仿真系統(tǒng)統(tǒng)一的時鐘,同步處理軟件模塊的初始化;全系統(tǒng)流程控制,啟動仿真流程,調(diào)用其他各個模塊。
2)協(xié)調(diào)整個仿真系統(tǒng)的運作,完成數(shù)據(jù)生成模塊與數(shù)據(jù)融合模塊之間的通信控制,完成各個模塊運行的時序排列、輸入/輸出要求。
3)提供仿真系統(tǒng)人機交互界面,包括選擇與顯示仿真場景,設(shè)置火控雷達、數(shù)據(jù)鏈、地理信息系統(tǒng)、直升機狀態(tài)、目標數(shù)量/狀態(tài)等參數(shù),設(shè)置仿真次數(shù),設(shè)定傳感器組合,啟動仿真運行,顯示仿真結(jié)果。
1.3 仿真系統(tǒng)運行流程
仿真系統(tǒng)采用VisualC++6.0和Matlab混合編程實現(xiàn),運行環(huán)境為win7系統(tǒng),總體運行流程如圖3所示。仿真系統(tǒng)為分布式系統(tǒng),數(shù)據(jù)生成模塊模擬出目標數(shù)據(jù)后,將數(shù)據(jù)依次傳輸至融合模塊和解算模塊。數(shù)據(jù)通信基于TCP/IP協(xié)議,利用網(wǎng)絡(luò)套接字Socket實現(xiàn),并通過VisualC++6.0提供的CSocket類完成通信處理。
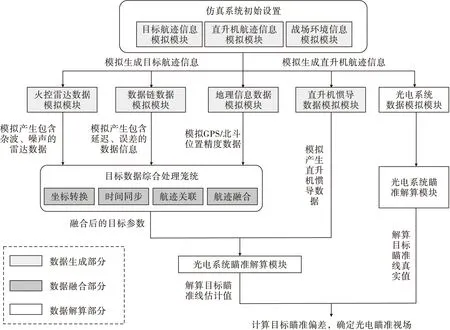
圖3 仿真系統(tǒng)運行流程
仿真系統(tǒng)在軟件設(shè)計時充分考慮了用戶接口。其中,在數(shù)據(jù)生成模塊設(shè)計時,預留了各傳感器的數(shù)據(jù)接口,實現(xiàn)了模塊的通用性。傳感器的性能參數(shù)通過可編輯的屬性頁實現(xiàn),并根據(jù)需要選擇和輸入?yún)?shù),賦予合理的默認值。傳感器的目標航跡信息可以進行中斷設(shè)定,包括航跡中斷起止時間、航跡中斷可恢復最大間隔時間等。顯示設(shè)定通過可選擇復合框和可編輯對話框?qū)崿F(xiàn)。在數(shù)據(jù)融合模塊設(shè)計時,根據(jù)多目標的優(yōu)先級順序,利用通信網(wǎng)絡(luò)將目標融合數(shù)據(jù)傳送至數(shù)據(jù)處理和顯示模塊。
2 數(shù)據(jù)生成模塊
數(shù)據(jù)生成模塊主要包括目標數(shù)據(jù)模擬、直升機數(shù)據(jù)模擬和傳感器數(shù)據(jù)模擬。
2.1 目標數(shù)據(jù)模擬
目標數(shù)據(jù)模擬模塊用于生成每個目標的航跡數(shù)據(jù)(包括目標位置、速度、加速度),根據(jù)設(shè)置的典型仿真場景,模擬目標的運動軌跡。每個目標參數(shù)相互獨立,目標航跡可以預先獨立設(shè)定,形成航路點文件保存,也可對其進行實時操作。
目標數(shù)據(jù)生成模塊由系統(tǒng)總控模塊調(diào)用,該模塊的輸入是目標數(shù)量、目標運動參數(shù)和仿真時間。目標運動模型主要有:勻速模型、勻加速模型、交互式多模型、當前統(tǒng)計運動模型等。模塊輸出是目標在每個仿真時刻的運動參數(shù)。
2.2 直升機數(shù)據(jù)模擬
1)直升機航跡信息模擬模塊
直升機航跡信息模擬模塊用于生成直升機的空間航跡數(shù)據(jù)(包括直升機位置、速度、加速度),模擬直升機的運動軌跡。直升機航跡可任意設(shè)定,或采用預定航路點文件給出。
該模塊的輸入是直升機平臺的機動性能參數(shù)和仿真時間。直升機運動模型主要包括勻速模型、勻加速模型、圓周運動模型、交互式多模型、當前統(tǒng)計運動模型等。模塊輸出為直升機在每個仿真時刻的運動參數(shù)。
2)直升機慣導數(shù)據(jù)模擬模塊
直升機慣導數(shù)據(jù)模擬模塊是以生成的直升機航跡信息為基礎(chǔ),綜合考慮慣導系統(tǒng)的位置誤差和角度誤差,疊加生成直升機的慣導數(shù)據(jù),包括直升機位置(經(jīng)度、緯度、高度)、速度矢量、飛行姿態(tài)(方位角、俯仰角、滾轉(zhuǎn)角)數(shù)據(jù)等。
2.3 傳感器數(shù)據(jù)模擬
根據(jù)系統(tǒng)總控模塊選定的仿真場景,以及設(shè)置的傳感器參數(shù)進行加噪加雜處理,實現(xiàn)火控雷達、光電系統(tǒng)、數(shù)據(jù)鏈的目標數(shù)據(jù)模擬。
1)火控雷達數(shù)據(jù)模擬模塊
火控雷達數(shù)據(jù)模擬模塊用于生成雷達測量數(shù)據(jù);該模塊的輸入是目標數(shù)據(jù)模擬模塊生成的目標數(shù)據(jù),輸出是每個時刻目標在火控雷達坐標系中的距離、角度(方位角、俯仰角)、速度等參數(shù)。該模塊中加入了正態(tài)分布和瑞利分布噪聲來模擬雷達探測目標的隨機噪聲,以此提高數(shù)據(jù)仿真的逼真度。
2)數(shù)據(jù)鏈數(shù)據(jù)模擬模塊
數(shù)據(jù)鏈數(shù)據(jù)模擬模塊用于生成數(shù)據(jù)鏈提供的信息,該信息包含了數(shù)據(jù)率和傳輸延遲,暫不考慮數(shù)據(jù)丟包。其中,數(shù)據(jù)鏈的精度和數(shù)據(jù)率由提供目標數(shù)據(jù)的平臺和通信網(wǎng)絡(luò)決定;傳輸延遲由數(shù)據(jù)包發(fā)送和到達時間確定。
3)地理信息數(shù)據(jù)模擬模塊
地理信息數(shù)據(jù)模擬模塊用于生成目標在大地坐標系統(tǒng)下的參數(shù)信息,包括目標的經(jīng)度、緯度、高度。
3 數(shù)據(jù)融合模塊
數(shù)據(jù)融合模塊是仿真系統(tǒng)的核心,它接收火控雷達、數(shù)據(jù)鏈和地理信息系統(tǒng)等目標數(shù)據(jù),先進行坐標轉(zhuǎn)換、時間對準等數(shù)據(jù)預處理,再進行航跡融合。
3.1 數(shù)據(jù)預處理
數(shù)據(jù)預處理是多源信息融合的基礎(chǔ),直升機平臺不僅要融合機載傳感器的數(shù)據(jù),還要融合其它平臺利用數(shù)據(jù)鏈等傳輸?shù)臄?shù)據(jù)。這些數(shù)據(jù)具有不同的采樣間隔、數(shù)據(jù)格式、觀測坐標系,需要對其進行坐標轉(zhuǎn)換、時間對準、延遲外推等預處理。
1)坐標轉(zhuǎn)換
直升機載火控雷達、光電系統(tǒng)、數(shù)據(jù)鏈系統(tǒng)等都是基于各自的觀測坐標系。實現(xiàn)信息融合前,必須將不同坐標系的觀測值轉(zhuǎn)換到統(tǒng)一參考坐標系。仿真系統(tǒng)中采用的坐標轉(zhuǎn)換關(guān)系如圖4所示,坐標轉(zhuǎn)換采用齊次坐標轉(zhuǎn)換方法進行,先坐標系轉(zhuǎn)換,后坐標平移。
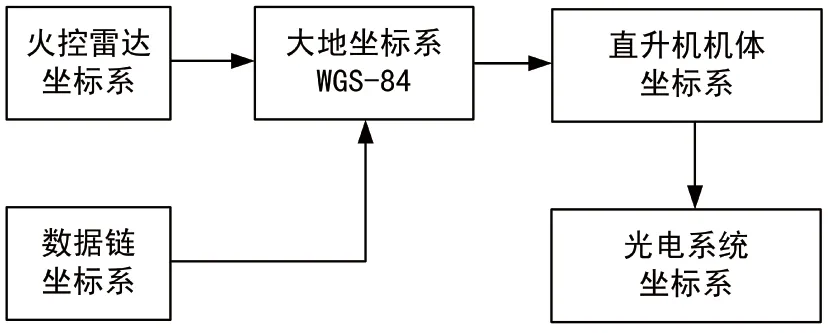
圖4 坐標轉(zhuǎn)換示意圖
2)時間對準
由于各傳感器上報數(shù)據(jù)的起始時間及數(shù)據(jù)率不同,在數(shù)據(jù)融合前,仿真系統(tǒng)主要采用最小二乘、內(nèi)插外推、拉格朗日二次插值等[4]方法,將不同時刻的傳感器數(shù)據(jù)進行時間對準。
3)狀態(tài)延遲外推
由于通信傳輸原因,數(shù)據(jù)鏈的目標數(shù)據(jù)存在延遲,仿真系統(tǒng)采用“目標觀測補償”的方法,虛擬產(chǎn)生目標量測值,在卡爾曼濾波算法的基礎(chǔ)上,實現(xiàn)對數(shù)據(jù)鏈傳輸延遲的外推補償。設(shè)數(shù)據(jù)鏈傳輸延遲時間為td,虛擬產(chǎn)生的目標量測補償值為
(1)
其中,xk+1為目標狀態(tài),zk+1|k為k+1時刻的目標觀測值,zk+td|k為延遲外推后的目標觀測值。
3.2 航跡融合
直升機多源信息融合采用分布式融合結(jié)構(gòu),首先由各傳感器形成目標的航跡信息,在航跡關(guān)聯(lián)基礎(chǔ)上,對分布式航跡數(shù)據(jù)進行融合。根據(jù)各傳感器的目標航跡信息是否同步,分為航跡同步融合和航跡異步融合[5]。
1)航跡同步融合
航跡同步融合是以火控雷達、數(shù)據(jù)鏈、地理信息系統(tǒng)等傳感器的局部狀態(tài)估計為基礎(chǔ),統(tǒng)一進行數(shù)據(jù)融合處理。由于在相同的戰(zhàn)場環(huán)境下,火控雷達、數(shù)據(jù)鏈等多傳感器之間的量測噪聲存在相關(guān)性,從而對航跡融合精度產(chǎn)生影響,因此在仿真系統(tǒng)的軟件算法設(shè)計中,重點引入噪聲不相關(guān)和噪聲相關(guān)兩種融合算法[6]。這兩種方法均等價于集中式融合算法,航跡融合估計的結(jié)果是最小均方根意義下的。其中,噪聲相關(guān)的融合算法可適用于噪聲相關(guān)程度高的作戰(zhàn)環(huán)境,能夠提高火控雷達、數(shù)據(jù)鏈等數(shù)據(jù)的融合精度。
2)航跡異步融合
由于火控雷達、數(shù)據(jù)鏈、地理信息系統(tǒng)等傳感器數(shù)據(jù)不同步,以及數(shù)據(jù)鏈傳輸延遲等問題,無法進行航跡同步融合。為此,在仿真系統(tǒng)的軟件算法設(shè)計中,引入可應(yīng)用于工程實踐的航跡異步融合算法,并采用集中式、分布式、實時更新的三種異步融合策略[7]來解決各傳感器不同采樣速率和數(shù)據(jù)處理周期的問題。
4 數(shù)據(jù)處理與顯示模塊
4.1 數(shù)據(jù)處理模塊
數(shù)據(jù)處理模塊主要用于接收數(shù)據(jù)融合模塊的信息,進行目標瞄準線解算,然后將計算的目標瞄準線與真實目標線進行對比,以此確定目標瞄準線方位和俯仰角度偏差[8],如圖5所示。模塊輸入是目標位置、直升機位置和姿態(tài)參數(shù),模塊輸出是光電系統(tǒng)目標瞄準線的方位角和俯仰角。
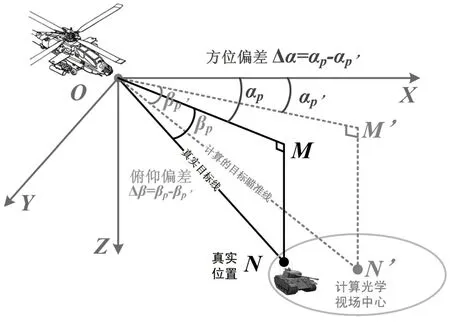
圖5 目標瞄準線角度偏差示意圖
光電系統(tǒng)目標瞄準線角度偏差計算方法如下:
步驟1:目標瞄準線計算。根據(jù)融合后的目標數(shù)據(jù)與直升機的空間位置關(guān)系,計算光電系統(tǒng)目標瞄準線的方位角和俯仰角。
步驟2:目標瞄準線偏差計算。將計算的目標瞄準線與真實目標線進行對比,分別計算方位角和俯仰角的目標瞄準線偏差。
步驟3:迭代計算。仿真系統(tǒng)設(shè)置了隨機誤差,采用蒙特卡洛統(tǒng)計試驗法,計算目標瞄準線偏差均值。
4.2 數(shù)據(jù)顯示模塊
數(shù)據(jù)顯示模塊主要用于顯示光電系統(tǒng)的目標瞄準線和探測視場,以及目標的顯示位置。根據(jù)計算目標瞄準線與真實目標瞄準線的偏差大小,存在四類典型情形:一是目標位于光學系統(tǒng)小視場內(nèi);二是目標位于光學系統(tǒng)中視場內(nèi);三是目標位于在光學系統(tǒng)大視場內(nèi);四是目標位于在光學系統(tǒng)大視場外。光電系統(tǒng)需要根據(jù)計算的目標瞄準線偏差,合理確定視場中心和視場范圍,實現(xiàn)對目標的快速精確瞄準。
5 結(jié)束語
本文針對直升機多源信息融合的需求,設(shè)計了一種信息融合仿真系統(tǒng),并給出了傳感器協(xié)同探測的方法。該系統(tǒng)在融合處理火控雷達、數(shù)據(jù)鏈、地理信息系統(tǒng)等數(shù)據(jù)的基礎(chǔ)上,利用融合后的目標信息,引導光電系統(tǒng)進行協(xié)同探測,實現(xiàn)對目標的快速精確瞄準。利用提出的方法可以提高直升機多源信息利用效率,降低火控雷達探測照射時間,獲得優(yōu)良的低截獲性能,研究成果可為開展直升機多源信息融合技術(shù)研究提供參考。由于火控雷達作用距離遠,在協(xié)同探測時還要考慮雷達以及數(shù)據(jù)鏈提供數(shù)據(jù)與光電系統(tǒng)探測距離匹配性的問題。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數(shù)理化(高中版.高考數(shù)學)(2021年1期)2021-03-19 08:28:38
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
