SEBAPULS雷達(dá)水位計(jì)的誤差分析及水位的自動(dòng)化校準(zhǔn)
2021-07-20 19:54:41郭秋歌王小遠(yuǎn)
河南科技 2021年4期
郭秋歌 王小遠(yuǎn)
摘 要:在明渠流量計(jì)算中,水位精度要求高,水位觀測(cè)數(shù)據(jù)必須及時(shí)更新。這對(duì)水位觀測(cè)數(shù)據(jù)的及時(shí)性和有效性提出了較高的要求,傳統(tǒng)的人工測(cè)量已經(jīng)不能滿足當(dāng)前需求。本文以德國(guó)希貝SEBAPULS雷達(dá)水位計(jì)為例,采用目標(biāo)實(shí)時(shí)校準(zhǔn)法,分析雷達(dá)水位計(jì)測(cè)量誤差來源并進(jìn)行校驗(yàn),并通過編程將水位計(jì)測(cè)量值傳輸?shù)缴衔粰C(jī),實(shí)現(xiàn)水位數(shù)據(jù)的遠(yuǎn)程傳輸及自動(dòng)化處理。
關(guān)鍵詞:雷達(dá)水位計(jì);目標(biāo)實(shí)時(shí)校準(zhǔn)法;PLC上位機(jī);比測(cè)分析
中圖分類號(hào):P335.1文獻(xiàn)標(biāo)識(shí)碼:A文章編號(hào):1003-5168(2021)04-0079-03
Abstract: In the open channel flow calculation, the water level accuracy is required to be high, and the water level observation data must be updated in time. This puts high demands on the timeliness and effectiveness of water level observation data, and traditional manual measurement can no longer meet current needs. This paper took the German SEBAPULS radar water level gauge as an example, adopted the target real-time calibration method, analyzed the source of the radar water level gauge measurement error and performed verification, during which the measured value of the water level gauge was transmitted to the upper computer through programming, so as to realize the remote transmission and automatic processing of water level data.
Keywords: radar water level gauge;target real-time calibration method;PLC upper computer;comparison analysis
明渠流量測(cè)定和計(jì)算對(duì)防洪抗旱有著重要的作用,其中,水位測(cè)定是明渠流量計(jì)算的一個(gè)關(guān)鍵環(huán)節(jié)。傳統(tǒng)的水位測(cè)定方法主要有速度-面積法、水壩和水槽法、動(dòng)船法等[1]。傳統(tǒng)方法通常通過人工現(xiàn)場(chǎng)測(cè)量完成,這使得數(shù)據(jù)的及時(shí)性和有效性面臨巨大考驗(yàn)。近年來,隨著雷達(dá)水位計(jì)、超聲波水位計(jì)在水利工程應(yīng)用上的廣泛普及,越來越多的水利工作者采用水位計(jì)觀測(cè)數(shù)據(jù)代替人工觀測(cè)數(shù)據(jù),以實(shí)現(xiàn)水利工程的智能化管理。有研究[2-3]通過比較測(cè)量法分析驗(yàn)證,給出雷達(dá)水位觀測(cè)數(shù)據(jù)可作為正式水位觀測(cè)數(shù)據(jù)的依據(jù),實(shí)現(xiàn)誤差允許范圍內(nèi)水位數(shù)據(jù)的自動(dòng)化處理,提高工作效率,改善黃河上游水文站的水位測(cè)報(bào)條件。趙安林等[4]利用雙目標(biāo)實(shí)時(shí)校準(zhǔn)法,抵消由聲速引起的誤差,從而減小整個(gè)水位計(jì)的測(cè)量誤差,使雷達(dá)水位觀測(cè)數(shù)據(jù)能夠更準(zhǔn)確地代替正式水位觀測(cè)數(shù)據(jù)。
德國(guó)希貝SEBAPULS雷達(dá)水位計(jì)是一種高精度的非接觸式水位測(cè)量?jī)x器,其突出的優(yōu)點(diǎn)是實(shí)現(xiàn)非接觸測(cè)量,安裝方便,利用電磁波探測(cè)距離,不受溫度、濕度、氣壓、雨雪和風(fēng)沙等環(huán)境因素的影響,可直接測(cè)量自然河道水位,實(shí)現(xiàn)水位數(shù)據(jù)的遠(yuǎn)程傳輸及自動(dòng)化處理。此外,SEBAPULS雷達(dá)水位計(jì)具有水位跟蹤速度快、非接觸測(cè)量以及受風(fēng)、沙、溫度和漂浮物的影響小的特性,很適合在黃河中上游溫差大的常年無封凍河段上使用。本文以德國(guó)希貝SEBAPULS雷達(dá)水位計(jì)為例,通過編程將其測(cè)得的水位數(shù)據(jù)傳輸?shù)絇LC上位機(jī)[5],并采用目標(biāo)實(shí)時(shí)校準(zhǔn)法[4]對(duì)雷達(dá)水位計(jì)測(cè)量的誤差來源進(jìn)行分析、校驗(yàn),從而實(shí)現(xiàn)水位數(shù)據(jù)的遠(yuǎn)程傳輸及自動(dòng)化處理。
1 工作原理
雷達(dá)水位計(jì)也叫水位雷達(dá),是利用電磁波探測(cè)目標(biāo)的電子設(shè)備。它主要用于水文監(jiān)測(cè)、污水處理和防洪預(yù)警等。雷達(dá)水位計(jì)的主要測(cè)量原理是雷達(dá)水位傳感天線發(fā)射電磁波脈沖,其在空氣介質(zhì)中傳播,遇到水面,在界面處將產(chǎn)生反射,部分電磁能被反射至發(fā)射源。經(jīng)測(cè)定,電磁波在水位計(jì)和水面之間往返傳播的時(shí)間為[T],由于電磁波的傳播速度[C]是個(gè)常數(shù),因此人們可以測(cè)出水位計(jì)與水面之間的距離[H]。
2 測(cè)量方法
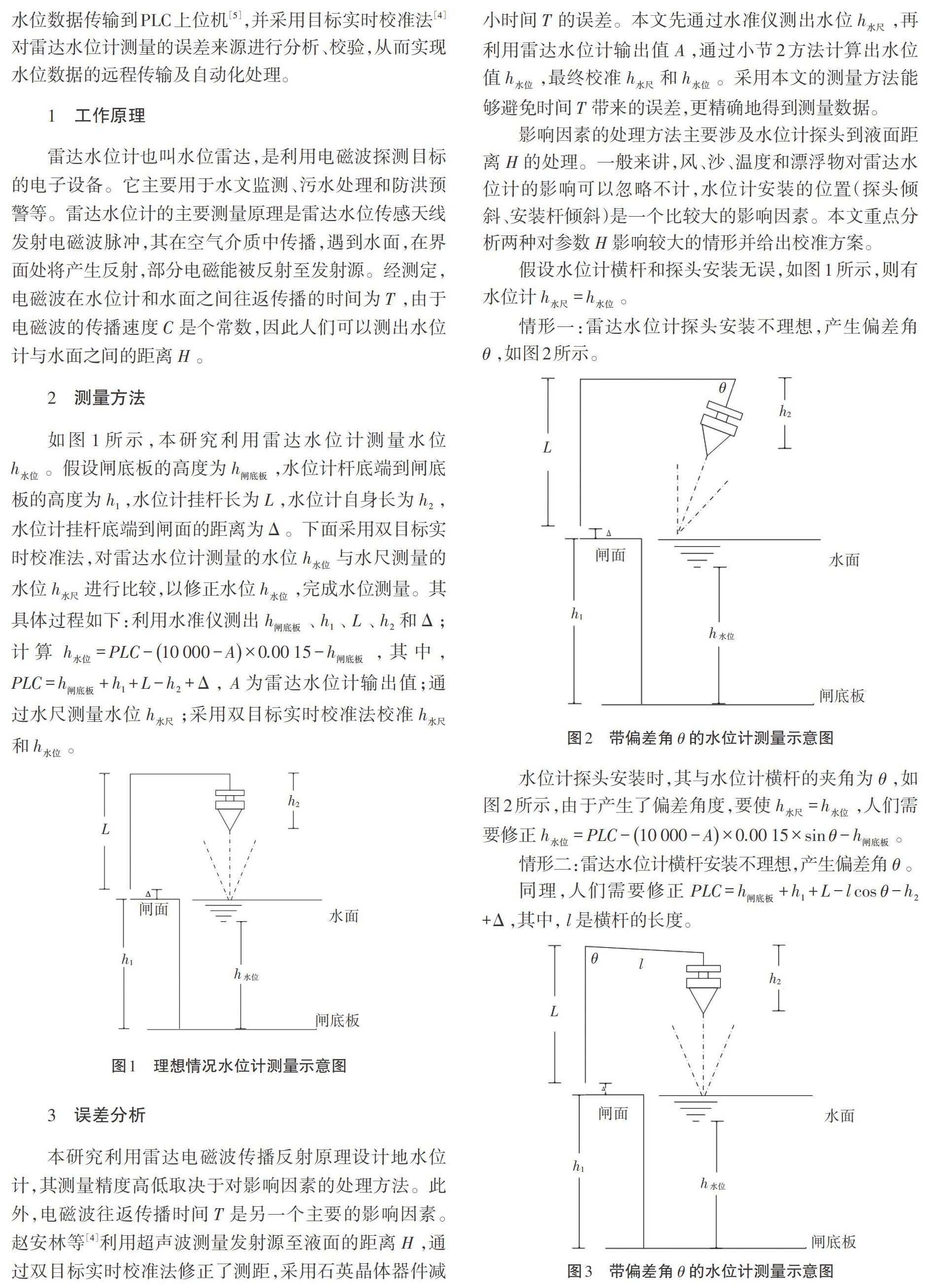
如圖1所示,本研究利用雷達(dá)水位計(jì)測(cè)量水位[h水位]。假設(shè)閘底板的高度為[h閘底板],水位計(jì)桿底端到閘底板的高度為[h1],水位計(jì)掛桿長(zhǎng)為[L],水位計(jì)自身長(zhǎng)為[h2],水位計(jì)掛桿底端到閘面的距離為[Δ]。下面采用雙目標(biāo)實(shí)時(shí)校準(zhǔn)法,對(duì)雷達(dá)水位計(jì)測(cè)量的水位[h水位]與水尺測(cè)量的水位[h水尺]進(jìn)行比較,以修正水位[h水位],完成水位測(cè)量。其具體過程如下:利用水準(zhǔn)儀測(cè)出[h閘底板]、[h1]、[L]、[h2]和[Δ];計(jì)算[h水位=PLC-10 000-A×0.00 15-h閘底板],其中,[PLC=h閘底板+h1+L-h2+Δ],[A]為雷達(dá)水位計(jì)輸出值;通過水尺測(cè)量水位[h水尺];采用雙目標(biāo)實(shí)時(shí)校準(zhǔn)法校準(zhǔn)[h水尺]和[h水位]。
3 誤差分析
本研究利用雷達(dá)電磁波傳播反射原理設(shè)計(jì)地水位計(jì),其測(cè)量精度高低取決于對(duì)影響因素的處理方法。此外,電磁波往返傳播時(shí)間[T]是另一個(gè)主要的影響因素。趙安林等[4]利用超聲波測(cè)量發(fā)射源至液面的距離[H],通過雙目標(biāo)實(shí)時(shí)校準(zhǔn)法修正了測(cè)距,采用石英晶體器件減小時(shí)間[T]的誤差。本文先通過水準(zhǔn)儀測(cè)出水位[h水尺],再利用雷達(dá)水位計(jì)輸出值[A],通過小節(jié)2方法計(jì)算出水位值[h水位],最終校準(zhǔn)[h水尺]和[h水位]。采用本文的測(cè)量方法能夠避免時(shí)間[T]帶來的誤差,更精確地得到測(cè)量數(shù)據(jù)。
影響因素的處理方法主要涉及水位計(jì)探頭到液面距離[H]的處理。一般來講,風(fēng)、沙、溫度和漂浮物對(duì)雷達(dá)水位計(jì)的影響可以忽略不計(jì),水位計(jì)安裝的位置(探頭傾斜、安裝桿傾斜)是一個(gè)比較大的影響因素。本文重點(diǎn)分析兩種對(duì)參數(shù)[H]影響較大的情形并給出校準(zhǔn)方案。
假設(shè)水位計(jì)橫桿和探頭安裝無誤,如圖1所示,則有水位計(jì)[h水尺=h水位]。
情形一:雷達(dá)水位計(jì)探頭安裝不理想,產(chǎn)生偏差角[θ],如圖2所示。
水位計(jì)探頭安裝時(shí),其與水位計(jì)橫桿的夾角為[θ],如圖2所示,由于產(chǎn)生了偏差角度,要使[h水尺=h水位],人們需要修正[h水位=PLC-10 000-A×0.00 15×sinθ-h閘底板]。
情形二:雷達(dá)水位計(jì)橫桿安裝不理想,產(chǎn)生偏差角[θ]。
同理,人們需要修正[PLC=h閘底板+h1+L-lcosθ-h2][+Δ],其中,[l]是橫桿的長(zhǎng)度。
4 試驗(yàn)數(shù)據(jù)分析
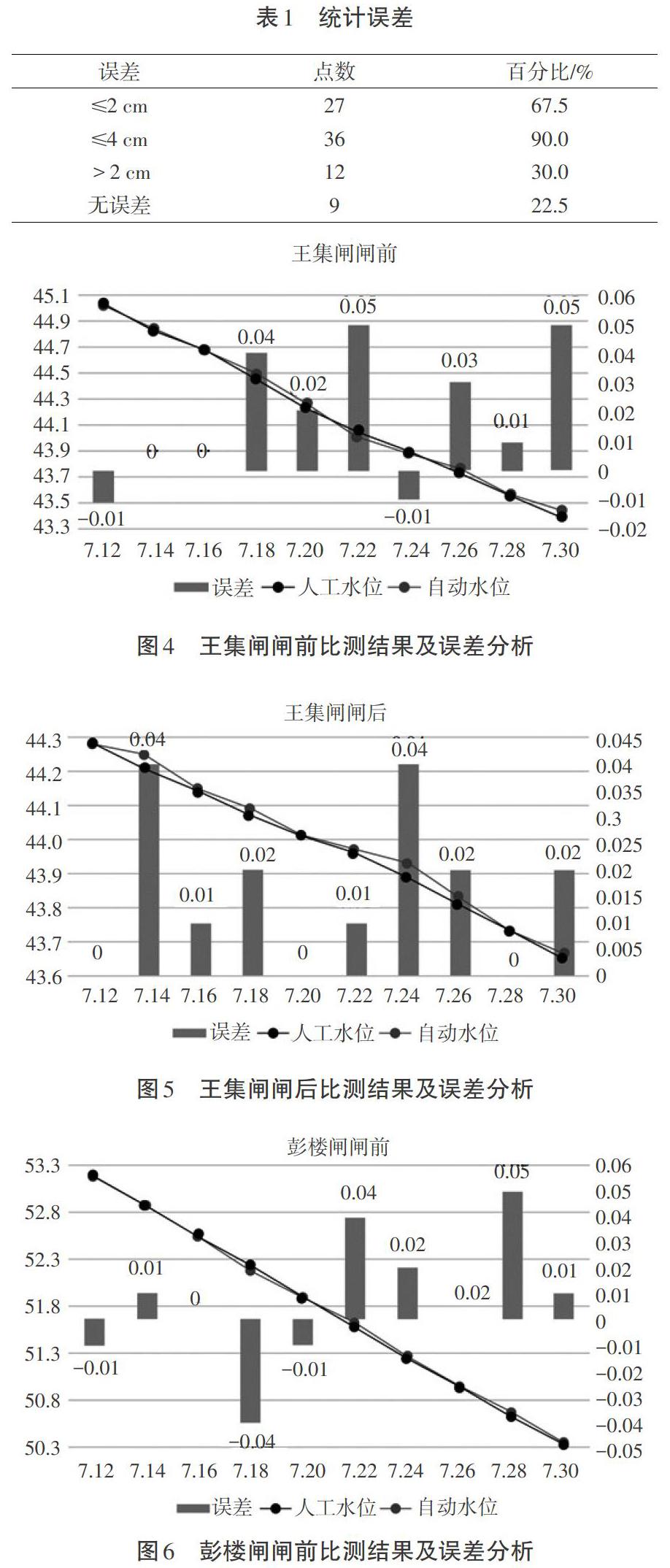
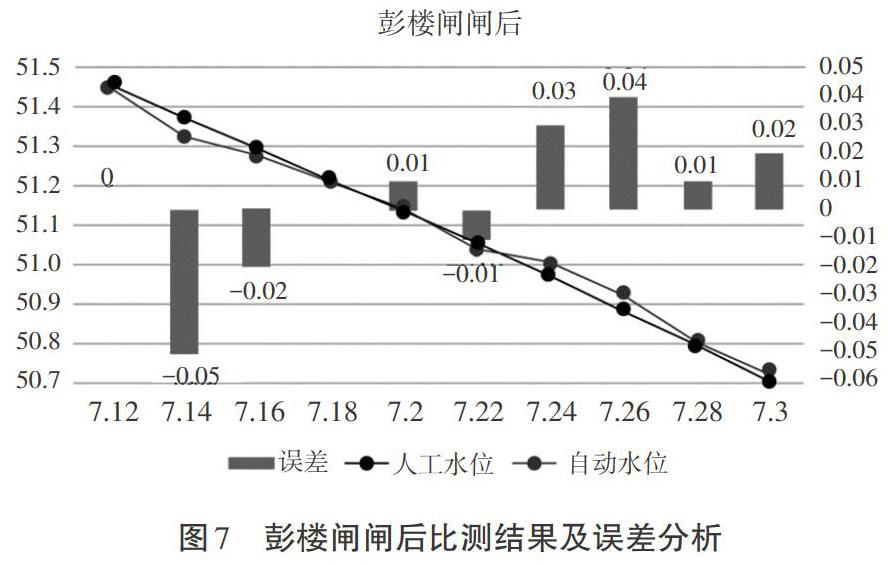
本文以南小堤、彭樓兩處作為驗(yàn)證點(diǎn),利用水準(zhǔn)儀測(cè)出[h閘底板]、[h1]、[L]、[h2]和[Δ]。下面對(duì)水尺測(cè)量出來的水位[h水尺]與雷達(dá)水位計(jì)測(cè)出的水位[h水位]進(jìn)行比測(cè),水尺測(cè)量出來的水位[h水尺]表示人工水位,雷達(dá)水位計(jì)測(cè)出的水位[h水位]表示自動(dòng)水位,比測(cè)結(jié)果如圖4、圖5、圖6和圖7所示,統(tǒng)計(jì)誤差如表1所示。
經(jīng)過校準(zhǔn)后,自動(dòng)水位顯示的讀數(shù)曲線與人工水位顯示的讀數(shù)曲線基本一致,但并沒有完全重合,這是因?yàn)槭墉h(huán)境(風(fēng)、沙、溫度、漂浮物)的影響,水位計(jì)產(chǎn)生小幅度波動(dòng)。此外,人工水位的小數(shù)點(diǎn)后的數(shù)值是通過人工估讀出來的,可能會(huì)造成5 cm以內(nèi)的偏差。渠道水位在一天中是連續(xù)變化的,而人工水位只在一天當(dāng)中特定的離散時(shí)間點(diǎn)讀取,與自動(dòng)水位(通過PLC采集記錄并求出不同時(shí)間段的水位)相比,會(huì)產(chǎn)生一定的誤差。這也是產(chǎn)生誤差的另一個(gè)重要因素,總體說來,自動(dòng)水位可靠性更高。
通過表1可以看出,在15 m變幅范圍內(nèi),SEBAPULS雷達(dá)水位計(jì)測(cè)定誤差小于或者等于±4 cm的保證率為90%,誤差小于或等于±2 cm的保證率為67.5%。無誤差的保證率達(dá)到22.5%。其精度指標(biāo)達(dá)到了水文測(cè)驗(yàn)規(guī)范要求,證明了自動(dòng)水位值的有效性和科學(xué)性。
5 結(jié)論
本文利用德國(guó)希貝SEBAPULS雷達(dá)水位計(jì),采用目標(biāo)實(shí)時(shí)校準(zhǔn)法對(duì)雷達(dá)水位計(jì)測(cè)量誤差來源的幾種重要情景進(jìn)行探究,并給出校驗(yàn)方法,開展誤差分析。數(shù)據(jù)分析顯示,其精度滿足水文測(cè)驗(yàn)規(guī)范要求。最后通過編程將水位計(jì)測(cè)量值傳輸?shù)缴衔粰C(jī),實(shí)現(xiàn)水位數(shù)據(jù)的遠(yuǎn)程傳輸及自動(dòng)化處理。
參考文獻(xiàn):
[1]徐俊林,陳紅勛,馬崢.明渠流量的研究現(xiàn)狀和進(jìn)展[C]//第十六屆全國(guó)水動(dòng)力學(xué)研討會(huì).2002.
[2]賈康中.雷達(dá)水位計(jì)在黃河上游小川、蘭州水文站的應(yīng)用[C]//全國(guó)水文泥沙文選.2010.
[3]權(quán)雄章,郭云杰,劉文洲.SEBAPULS20型雷達(dá)水位計(jì)在民和水文站的比測(cè)分析及應(yīng)用[J].甘肅水利水電技術(shù),2010(1):11-12.
[4]趙安林,白東義.HW-1000型非接觸式超聲波水位計(jì)測(cè)量誤差分析與檢驗(yàn)[J].水利水電技術(shù),1995(7):2-5.
[5]楊濤,王笑.PLC S7-300在前湖水閘控制系統(tǒng)中的應(yīng)用[J].江西水利科技,2011(3):211-213.
