人工神經網絡在智能車上的應用
2021-07-20 19:35:19張靜雨梁佳佳汪文卉
河南科技 2021年4期
關鍵詞:模塊化
張靜雨 梁佳佳 汪文卉


摘 要:在傳統的視覺尋跡智能車中,人們使用攝像頭獲得路況信息,并對圖像加以處理,然后根據產生的偏差來控制小車行駛,它會根據設定好的判定條件實現方向控制。而人工訓練的神經網絡能夠在訓練中不斷優化神經突觸的權值,并將信息存儲在內部,通過大量數據的學習,實現尋跡功能。本項目摒棄了傳統的電磁采集位置式PID控制算法,使用自行訓練的人工神經網絡模型對電磁傳感器的電磁進行分析。車模方向控制方面,不再手動編寫控制算法和調節參數,使訓練集、測試集等符合高斯分布。這樣不僅讓訓練出的神經網絡具有一定的魯棒性,還能夠增強智能車對道路的適應性。人工神經網絡控制算法可以應用到更多的人工智能領域,人們可以類比基于機器視覺的神經網絡控制模型,利用openCV(可編程全彩攝像頭),配合神經網絡算法,為無人駕駛技術在3D感知與物體檢測中的應用打下堅實基礎。同時,人們可以在其他領域做出進一步的嘗試:電子導盲犬利用openCV,配合特定算法,能很好地捕捉和反饋路面信息;垃圾分類機器人利用openCV強大的圖像處理庫,配合卷積神經網絡,可以實現垃圾的智能分類。
關鍵詞:人工神經網絡;智能車;模塊化
中圖分類號:TP18文獻標識碼:A文章編號:1003-5168(2021)04-0053-03
Abstract: In the traditional visual tracing smart car, people use the camera to obtain road condition information, process the image, and then control the driving of the car according to the deviation generated, and it will realize the direction control according to the set judgment conditions. The artificially trained neural network can continuously optimize the weight of the nerve synapse during training, and store the information internally, and realize the tracking function through the learning of a large amount of data. This project abandons the traditional electromagnetic acquisition position PID control algorithm, and uses a self-trained artificial neural network model to analyze the electromagnetic sensor's electromagnetic. Regarding the direction control of the car model, the control algorithm and adjustment parameters are no longer manually written, so that the training set, test set, etc. conform to the Gaussian distribution. This not only allows the trained neural network to have a certain degree of robustness, but also enhances the adaptability of the smart car to the road. Artificial neural network control algorithms can be applied to more artificial intelligence fields, people can compare neural network control models based on machine vision, use openCV (programmable full-color camera), and neural network algorithms to lay a solid foundation for the application of driverless technology in 3D perception and object detection. At the same time, people can make further attempts in other areas: electronic guide dogs use openCV with specific algorithms to capture and feedback road information well; the garbage sorting robot uses the powerful image processing library of openCV and the convolutional neural network to realize the intelligent classification of garbage.
Keywords: artificial neural network;intelligent car;modularity
智能車是典型的高新技術綜合體,其研究成果廣泛應用于交通運輸事業,是世界車輛工程領域研究的熱點[1-2]。傳統電磁采集位置式PID算法在積分環節中對從時間0到當前時間的偏差進行積分,采樣時間的輸出與過去的每個時間相關,而控制器的輸出對應執行器的實際位置,整個過程耗費內存空間,計算時間長[3-4]。本項目采用自行訓練的淺層人工神經網絡對來自電磁傳感器的電磁進行分析,可以避免PID算法的煩瑣調參問題,提高了智能車在學習過程中的穩定性、魯棒性,增強了路徑學習優化效果。
1 模型思想
1.1 主體設計
通過構想,本研究使用模擬軟件設計出整個小車運行的道路環境,最為重要的是人工神經網絡算法設計和小車方向行駛設計。通過模擬的彎道路徑圖制定路面行駛規則,規定小車不能行駛到賽道的邊緣,同時賦予訓練模型主體加速、減速、左轉和右轉四個基本操作,以此來控制小車的行駛軌跡。本研究設計出的小車系統框架如圖 1 所示。
1.2 模型設計
神經網絡的結構為7×15×2,其中,輸入層為7個變量,隱層為15個變量,輸出層為2個數據變量。神經算法層如圖2所示。7個輸入量分別為小車的速度、賽道的角度以及小車距離賽道邊緣的五個長度。輸出層的兩個變量表示賽車是否加速和轉向。通過主觀判斷,先設置小車的初始轉向角度為20°,后期再進行調整,使小車獲得最佳的轉向角度。
1.3 訓練設計
訓練設計主要是篩選出較優的人工神經網絡,實現數據的迭代與權值儲存。此過程使用人工神經網絡算法控制小車,不斷對這些收集的數據進行訓練,然后配合遺傳算法篩選表現最好的神經網絡,最終訓練出一個可以控制小車跑完全程的較為優秀的人工神經網絡。在訓練的過程中,對人工神經網絡進行當前權值分別為0.1、0.3、0.6的隨機擾動,以一定概率替換神經網絡某一層的權值,使權值儲存到神經網絡中,進行下一次的學習。
2 神經網絡算法及訓練過程
2.1 訓練權重和閾值
針對圖2所示的人工神經網絡算法層,在給定的訓練集[D=(x1,y1),(x2,y2),…,(xm,ym)]中,[xi]表示輸入層的第[i]個輸入,[Vih]表示輸入層的第[i]個輸入與隱層的第[h]個神經元的連接權重;[bh]表示隱層的第[h]個神經元的輸入,[Whj]表示隱層的第[h]個神經元到輸出層的第[j]個神經元的連接權重。其中,輸出層的第[j]個神經元的閾值用[θj]表示,輸入層的第[j]個神經元的閾值用[βj]表示,隱層和輸出層使用Sigmoid函數表示,即
下面通過不斷數據迭代,用含有大量測試數據的數據集去訓練權重和閾值,得到最優的結果。
2.2 算法流程
開始訓練前,本文用Python中的pygame庫畫出小車行駛經歷的彎道,將神經網絡的指標輸入主函數中,最后計算出移動的距離和迭代的次數。變量[v]代表速度變化,[v]=1時為加速,[v]=-1時為減速;變量[dit]用于控制方向,其中[dit]=-1時向左,[dit]=1時向右,最終確定小車是否能夠自動行駛,以驗證人工神經網絡在自動駕駛中的可行性,將此遷移到實際的智能車模型設計中。算法流程如圖3所示。
3 模型訓練
3.1 訓練路徑設計與結果
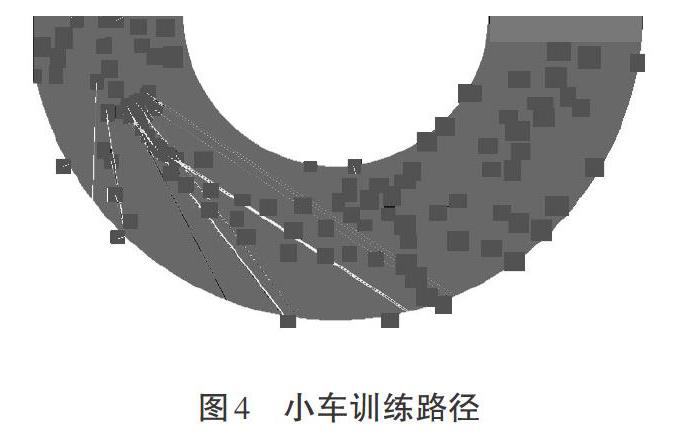
訓練路徑的設計對象是小車,所以人們需要考慮道路的狀況,不能讓小車觸碰道路邊緣,當小車到達彎道的盡頭時,結束訓練。如圖4所示,方塊代表小車,彎道是擬定的小車訓練軌跡圖,右邊的出口代表小車的行駛終點。小車的初始轉向角度為20°,但是經過多次調節參數后發現,角度偏小,訓練效果越好,因此將角度修改為10°,此時訓練效果得到改善,同時要注意人工神經網絡的數量級。
在訓練過程中,筆者觀察到每一次小車出發的行駛軌跡和訓練迭代次數,每一次小車都會自動保留前一次小車的行駛軌跡參數進行自主學習,不斷優化,最終獲取最佳路徑。
3.2 訓練結果分析
通過多次測試,本研究采用隨機方式抽取25次測試結果,數值分別為18、12、13、16、20、25、23、21、17、16、15、24、21、20、18、18、19、14、16、15、21、25、19、18和21,得出小車到終點的訓練次數的平均數為18次左右,意味著18次小車訓練就可以在人工神經網絡的學習下使小車達到最佳路徑,其中標準差為3.46,表明每一次的訓練不會偏移過大。
4 結語
本文采用自行訓練的人工網絡模型對來自電磁傳感器的電磁進行處理分析,使得智能車通過不斷學習自行優化行駛路徑,使其不受每次的調節參數以及跳變量時間延誤等問題的困擾,使模型對智能車的控制性和穩定性增強,但是神經網絡學習算法的收斂性和快速性等會因為控制對象的不同而存在差異[5]。本項目僅僅簡單對其做出假設,沒有真正投入實際應用環境。總之,人工神經網絡對智能車的控制是有待優化的。
當前,人工神經網絡廣泛應用在智能控制中。人們可以將其類比基于機器視覺的神經網絡控制模型,使openCV配合神經網絡算法,有效地應用在無人駕駛技術的3D感知與物體檢測中。同時,人們可以將人工神經網絡與openCV結合,在其他領域做出進一步的嘗試,例如,垃圾分類機器人利用openCV強大的圖像處理庫,配合卷積神經網絡,就可在智能的垃圾分類領域做出進一步的設想,使得智能的垃圾分類更加精確和標準,以此節約人力和物力。
參考文獻:
[1]李健明.基于深度學習的無人駕駛汽車環境感知與控制方法研究[D].西安:長安大學,2019:22-23.
[2]葉子豪.基于深度學習的無人駕駛感知與決策若干方法研究[D].合肥:合肥工業大學,2019:18-19.
[3]任淏哲.神經網絡在無人駕駛中的應用[J].科技傳播,2019(5):138-139.
[4]陳友宣.卷積神經網絡(CNN)在汽車無人駕駛中的應用與分析[J].科技創新與應用,2019(5):13-14.
[5]劉新磊,趙星洋,王琪琛.卷積神經網絡在無人駕駛感知技術上的應用[J].機械研究與應用,2019(1):156-159.
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
現代裝飾(2020年5期)2020-05-30 13:01:56
汽車與新動力(2019年5期)2019-11-07 05:20:16
系統管理學報(2018年3期)2018-08-13 01:05:42
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
石油化工建設(2015年2期)2015-12-01 04:16:44
中國教育技術裝備(2015年10期)2015-03-01 02:41:05
