基于北斗/GPS車輛定位系統的設計與測試
2021-07-20 07:58:36田震楊盤柱通訊作者
電子制作 2021年13期
關鍵詞:方向
田震,楊盤柱(通訊作者)
(1.貴陽電氣控制設備有限公司,貴州貴陽,550016;2.貴州索立得光電科技有限公司,貴州貴陽,550016)
0 引言
北斗/GPS定位設備都需要接收衛星信號來實現定位,要得到運動物體的行進軌跡,則需要實時接收衛星信號。車輛定位過程中途經嚴重遮擋地帶,接收設備無法接收衛星信號,導致定位數據漂移。如何解決數據漂移的問題,國內的學者提出了一些觀點,比如基于速度約束型的卡爾曼濾波法[1]、顧及速度約束的基于時間序列數據處理方法[2]、采用載波相位差分技術(RTK)來抑制數據漂移[3]。本設計提出了基于北斗/GPS 的車輛定位系統,并對當前技術存在的一些問題進行了改進。包括對拐點處的優化處理,對盲區類型進行判斷,并進行盲區補傳,盡量減輕環境帶來的影響。
1 方案設計及采用技術
終端設計采用主控模塊Air800配合加速度傳感器模塊MPU6050及供電電路實現車輛定位功能。在終端設備的設計過程中為了提高系統的性能,本設計進行了三點改進。
■1.1 盲區處理與慣性導航技術
長安大學的周經美提出了基于視覺感知的定位技術[5],提高了GPS盲區內車輛定位精度,但是該方法對數據處理單元的運行速度有著很高的要求,一般嵌入式模塊很難滿足。本設計采用慣性導航技術來解決盲區內定位數據無法獲取的問題,采用加速度傳感器獲取車輛的加速度和航向角,并采用航跡推算的方法得到車輛在盲區內的運行軌跡。
判斷車輛處在GSM盲區還是定位盲區或者同時盲區。如果處于GPS或北斗盲區,則通過加速度傳感器獲取車輛的加速度和航向角推算出車輛在盲區內的運行軌跡;如果處于GSM盲區,則待發送數據包會緩存至GPS_BUF,待出GSM盲區后,將數據補發至服務器。若有拐點出現,同樣將拐點數據包緩存起來,在下個周期執行發送之前先補傳拐點數據包。
設計中采用MPU6050傳感器獲取車輛的在某一時間點加速度和航向角,通過積分可以得到車輛的速度和位移。當車輛進入定位盲區時,利用慣性導航算法對車輛位置推算。實現過程如下:傳感器對速度和方向信息的測量是通過物理坐標系進行的,而位置計算是由導航坐標系完成,NOE為導航坐標系,yox為物理坐標系,可以得到狀態方程(1):

其中,γ是導航坐標系N軸與物理坐標系y軸的夾角,(n , e)是導航坐標系的北向和東向分量,(u , v)是物理坐標系中兩個幅度分量(u代表向前,v代表向右)[6]。
在定位數據中,可以得到車輛進入GPS定位盲區前K-1時刻的速度和航向φk1-,如圖1、2所示。
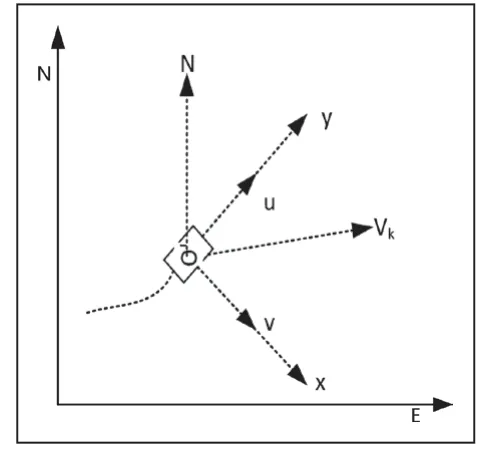
圖1 導航坐標系和物理坐標系
MPU6050可以測出車輛的三軸加速度(ax,ay,az)由牛頓慣性定理可得:
其中,Vk為速度的變化矢量,T為加速度傳感器的采樣周期車輛在k-1時刻的速度和向前的加速度ay方向是近似相同的[6],則有:

根據三角形正弦定理可得:
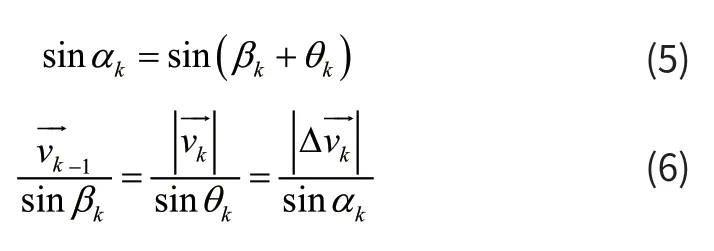
可以得到:

把(θk,βk,αk)帶入(7)式可以得出下一個時刻的速度:

由圖2中的三角形關系αk=|φk- φk-1|和加速度ax(k)的方向,可以得出下一時刻的航向k結合圖所示的兩個坐標系的轉換關系可以得出新時刻北向和東向位移[7]:
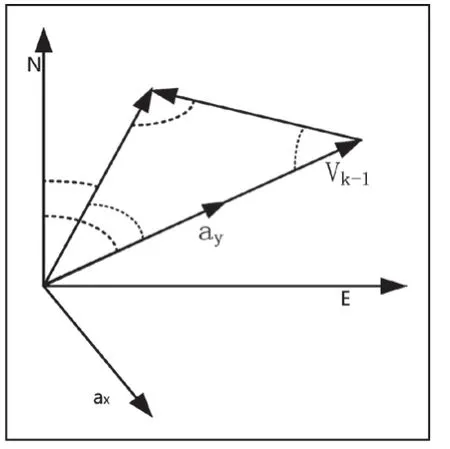
圖2 導航坐標系中的向量三角形

根據幾何關系分析,在較小的位移內經緯度的變化表示為:
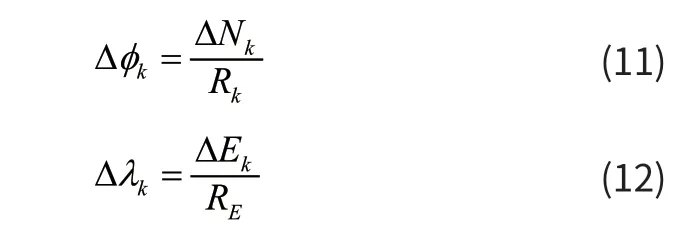
式中,kφΔ 為緯度變化;kλΔ 為經度變化;ER為地球半徑。GPS可以給出INS定位時的初始位置(λ,θ),新時刻的位置可以由下式得出[8]:

■1.2 拐點判斷技術
當前,國內針對拐點有著廣泛的研究,許志勇、于今等人提出了層間插值算法用于對物體邊緣輪廓的研究[9],該算法對輪廓差別不大的插值輪廓效果較好;李雪晨、汪仁煌等提出了改進型彎曲度算法[10],有效解決羽毛球生產過程中羽毛缺陷的階梯形狀修剪問題。以上研究均是對已有的物體或圖像的拐點研究。為了合理準確地描述車輛在拐彎處的運行軌跡,本設計采用閾值判斷的方法對拐點進行判斷,通過計算多個時間點的拐角之和,并與設定值進行對比,以此來判斷車輛是否拐彎,該方法將使得車輛在拐彎處運行軌跡的描述更加合理。
(1)拐彎方向:車輛拐彎一般發生在路口,方向分為三種:右拐、左拐、掉頭。如圖3、4、5所示。
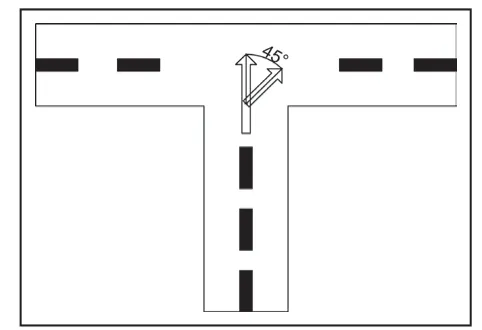
圖3 右轉彎示意圖
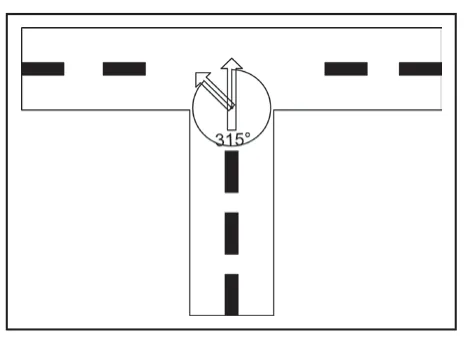
圖4 左轉彎示意圖
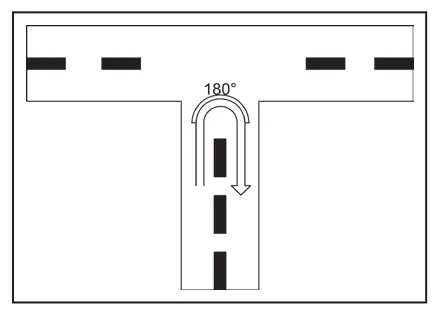
圖5 車輛掉頭示意圖
(2)拐彎方向范圍初步確定:本系統中Air800模塊采集到的方向角是以正北方向為0°方向,順時針方向的偏離角為方向角,范圍為0°~360°。車輛拐彎通常發生在路口處。在0°~360°的范圍內,并不是所有方向都算作拐彎。如圖6所示,假設車輛初始方向為箭頭所指方向,那么初步指定與初始方向偏離的角度:45°~315°范圍內為拐彎方向范圍,0°~45°以及315°~360°范圍則為非拐彎方向范圍。
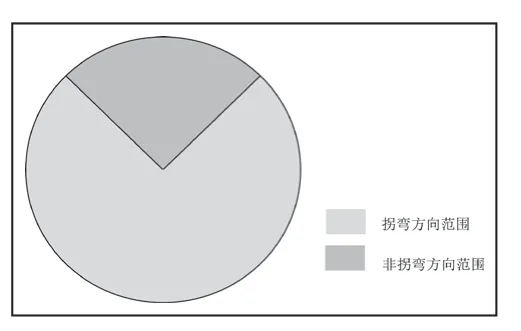
圖6 拐彎方向范圍示意圖
(3)拐點確定:在拐點判斷之前系統已完成8秒8個方向角采集并緩存。假設車輛方向角初值為x0(8秒之前采得),分別求得x1、x2、x3、x4、x5、x6、x7、x8與原始方向角度x0偏差,即它們與x0差的絕對值,并逐個緩存于數組DIF[8]中。若車輛發生了拐彎,則數組元素DIF[7]為最大偏離角度。DIF[0]~DIF[6]分別與最大偏離角的一半作比較,最先大于最大偏離角一半的點確定為拐點。最后將此點緩存于拐點發送緩存區。流程圖如圖7所示。
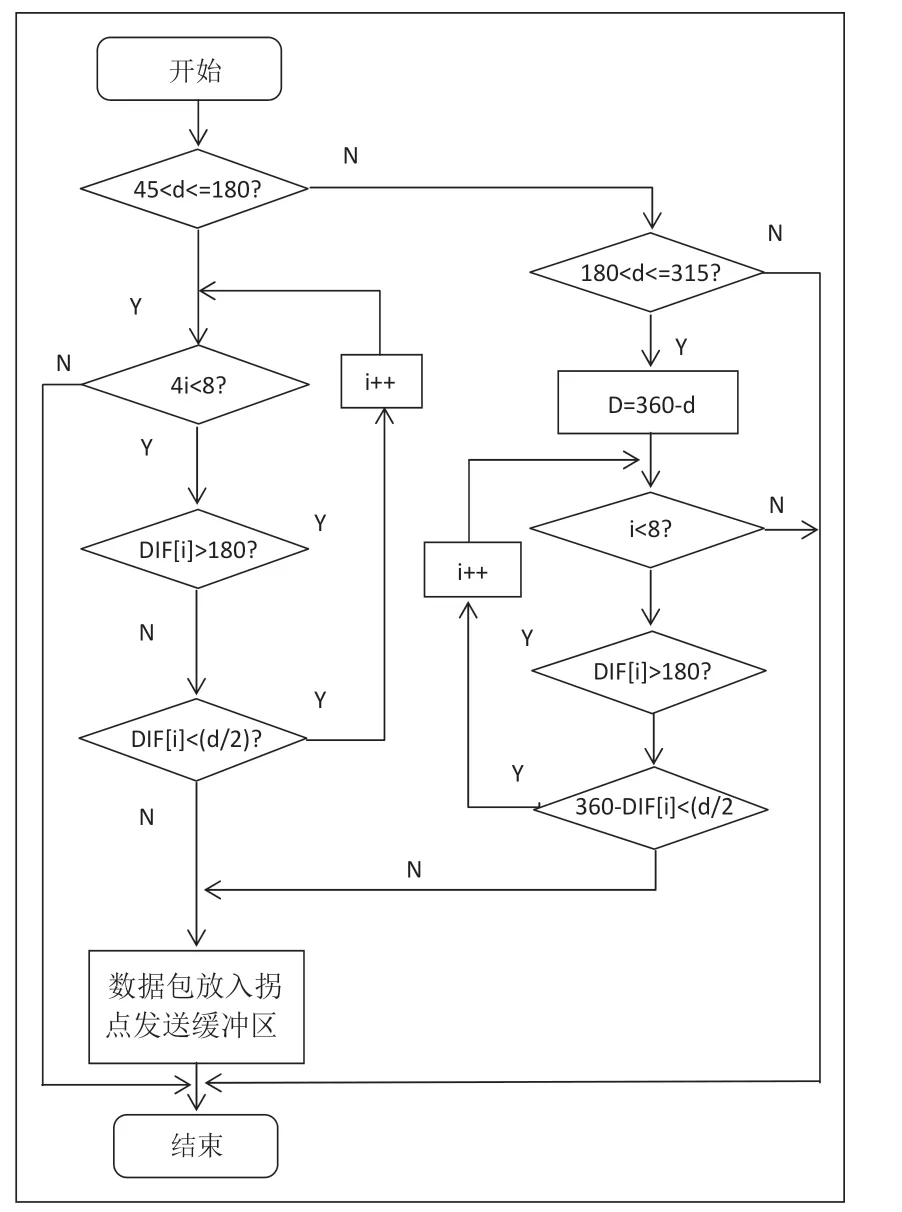
圖7 拐點判斷流程圖
■1.3 速度漂移處理技術
Air800模塊在運動狀態下速度值穩定變化,但在靜止狀態下存在速度漂移。比如車輛為靜止狀態,但數據包中的速度狀態位卻不為0。針對此問題,設置判斷算法。假設每秒采集一次速度值,采集8次,共采得8個速度值。8個速度值為0(或1)的個數為c。經過初步判斷和二次判斷后獲得標志位值,并添加進發送數據包中,在第8秒發送給服務器。初步判斷:
若c>4,即8個速度中0或1的總個數過半,則初步判斷車輛為靜止狀態。若c<4,即8個速度中0或1的總個數未超過一半,則初步判斷車輛為運動狀態。
二次判斷:若c>4,檢查上一次車輛運動狀態標志位,循環檢查5次,若5次均為靜止狀態,則判斷車輛當前狀態為靜止狀態。若c<4,同樣檢查上一次車輛運動狀態標志位,循環檢查5次,若5次均為運動狀態,則判斷車輛當前狀態為運動狀態。流程圖如圖8所示。
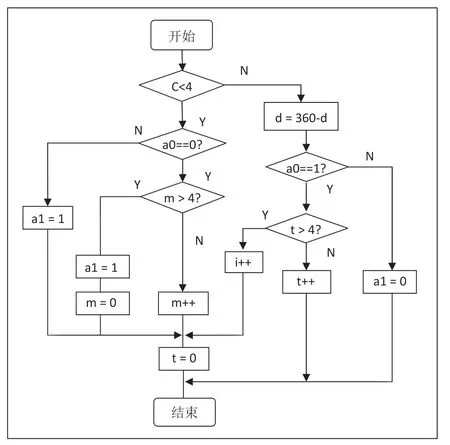
圖8 運動狀態判斷流程圖
其中c為采集的8次速度值中速度為0或1的總個數;a0是上一次發送數據包中的車輛狀態標志;a1是本次發送數據包中的車輛狀態標志;m是上一次發送數據包中的車輛狀態為靜止狀態的次數;t是上一次發送數據包中的車輛狀態為運動狀態的次數。經過以上速度漂移處理后,避免了因速度值采集誤差引起的車輛狀態誤判的情況。車輛狀態檢測更加準確。
2 功能測試
■2.1 定位功能測試
終端模塊上電后,當設備定位成功以后,接收到的定位數據包會在Lua Tools軟件的界面內顯示出來。數據包的內容如圖9中的紅色方框內所示。
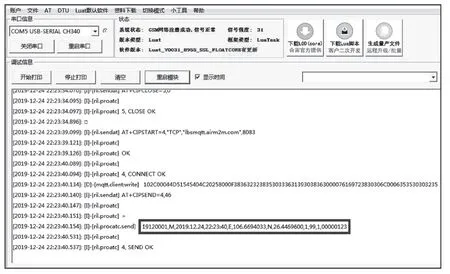
圖9 定位功能測試
■2.2 盲區處理與慣性導航功能測試
測試方案:將設備牢靠固定于車輛以后,車輛在選定區域進行測試。車輛運行過程中,將經歷拐彎、掉頭、進入北斗/GPS定位盲區和GSM通信盲區,以及停止熄火等狀態,以滿足實際使用過程的情況。對GPS/北斗盲區和GSM盲區的測試將選用地下停車場來模擬實際的定位盲區和GSM盲區。在此過程中設備無法獲取GPS定位數據,同時也無法發送數據包至服務器。
通過圖10和圖11可以很清楚地看出盲區處理與慣性導航功能確實對車輛在北斗/GPS盲區處的運行軌跡的描述起到了優化作用,該算法對車輛在盲區內的運行軌跡是可以描述出來的。并且通過觀察細節圖發現,該軌跡與車輛的實際運行軌跡基本吻合。

圖10 車輛運行軌跡圖
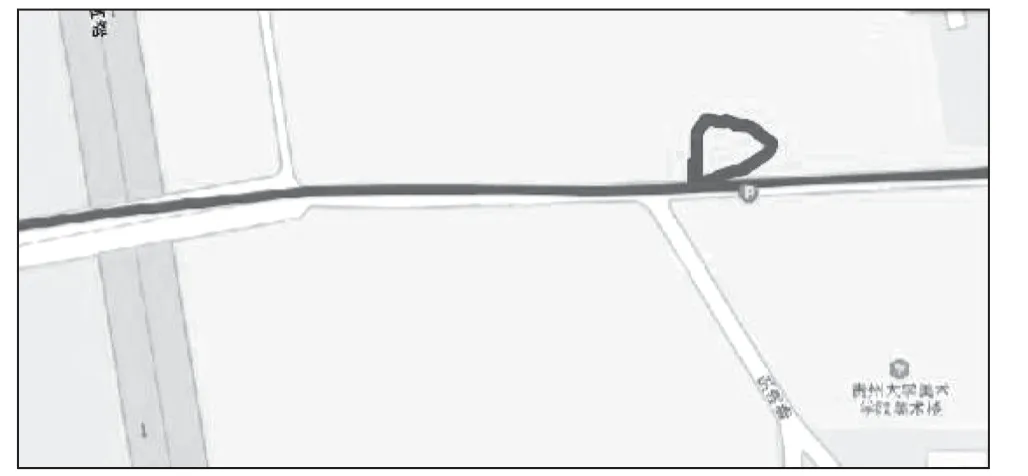
圖11 地下停車場運動軌跡細節圖
3 結論
通過對車輛定位系統的測試,驗證了系統的整體性能,滿足了設計要求和應用需求。設計通過AGPS技術縮短了定位模塊的冷啟動時間,通過此技術,模塊冷啟動時間縮短至18秒;拐點判斷技術、慣性導航技術的應用使GPS/北斗和GSM盲區內車輛運動軌跡被完整的記錄下來,解決盲區內數據漂移問題。車輛經過GPS/北斗和GSM盲區時,定位數據經盲區補傳后,運行軌跡與實際軌跡基本吻合,滿足了應用要求。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
