基于MSP430單片機的坡道行駛電動小車設計
2021-07-20 07:58:30孫弋婷
電子制作 2021年13期
關鍵詞:系統
孫弋婷
(杭州電子科技大學電子信息學院,浙江杭州,310018)
0 引言
智能小車又稱輪式移動機器人,是近年來發展起來的新興技術,能夠按預設模式在特定環境中自動移動,無需人工干預,現廣泛用于線路巡檢,科學勘測、安全監測、現代物流等方面。本文所設計的系統正是基于這樣的背景下, 結合全國大學生智能汽車競賽與科研應用, 以MSP430單片機為核心控制單元,通過紅外傳感器進行信息采集,利用增量式PID 算法控制電機,實現了小車的自動實現尋跡、車速控制和停車等功能。
1 系統總體設計
坡道行駛電動小車系統架構圖1所示,由MSP430F5529單片機最小系統,電源模塊,紅外模塊,舵機模塊、直流減速電機驅動模塊構成。系統采用紅外傳感器檢測路面上所做的黑色標記線,根據預先設定的位置信息判斷當前運行狀態,輸出PWM波對舵機進行控制,舵機的左右擺動控制車身轉向,達到循跡的目的。同時,為實現控速要求還需要將目標時間作為輸入,通過查表法獲得固定時間目標脈沖數,由PID計算得精確的PWM波進行電機轉速的控制,使到小車在設定時間內完成坡道行駛的任務。
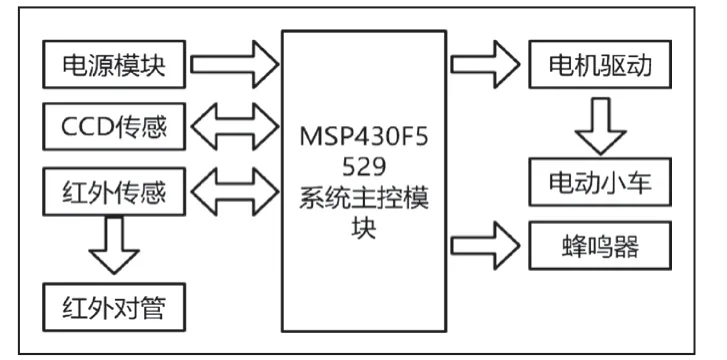
圖1 坡道行駛電動小車系統架構
2 硬件系統設計
■2.1 系統主控電路
主控模塊選用MSP430F5529芯片,該單片機是16位精簡指令集(RISC)結構的混合信號處理器,具有豐富的尋址方式(7種源操作數尋址、4種目的操作數尋址),簡潔的內核指令以及大量的模擬指令;有63個可編程的I/O口線,為用戶提供了豐富的I/O口資源、4個16位定時器,8+2^KB字節RAM,128KB的Flash,12位ADC,支持 UART 通信,最高主頻可達25MHz。
■2.2 電源電路
給線性 CCD 和紅外模塊以及 OLED 屏幕供以3.3V電壓,采用 TI 公司的一款 LDO—TPS7333,使用 5V 電壓給芯片供電,RESET引腳和輸出引腳要加一個 250kΩ的上拉電阻,輸出端和地之間放一個鉭電容和一個 1Ω電阻使輸出電壓更穩定。如圖2所示。
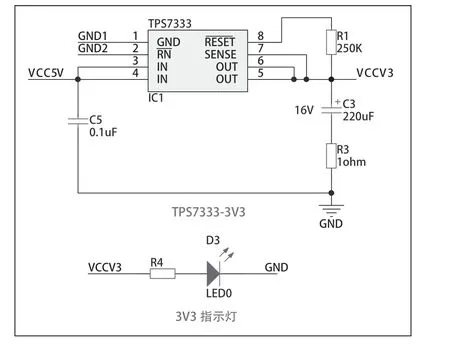
圖2 3.3V 系統電源
舵機使用 6V 電壓供電,采用 TI 公司的 TPS565201降壓芯片,輸出電壓Vout = 0.760*(1+R7/R8),取R7=6.9k,R9=1k,輸出電壓為 6V。如圖3所示。

圖3 小車系統舵機電源
■2.3 電機驅動電路
采用直流減速電機。通過控制電流改變小車行駛速度,其內部集成減速齒輪箱,提供較低的轉速,較大的力矩,速度較步進電機快。減速器效率高達95%以上,且其具有能耗低、噪音小保護性能好,對環境適應性強等特點,為小車的行駛提供了保障。如圖4所示。

圖4 電機驅動電路
3 系統軟件設計
電動小車系統工作流程如圖5所示,系統主要任務是根據當前路線與預期路線的偏差實現小車循跡的控制,通過編碼器配合速度環,進行勻速控制,提前測試賽道脈沖個數,通過時間與剩余脈沖與當前速度做差值當作誤差,進行增量式PID控制。

圖5 坡道行駛電動小車系統總流程圖
■3.1 路徑識別模塊
采用紅外對管傳感器和CCD傳感器聯合使用,有效防止紅外檢測不到或者CCD 丟線誤判的情況。工作時,CCD返回一條線(128 個ad 值)的模擬量灰度值,可以對舵機進行精確控制。由于木板顏色趨于黃色,灰度值介于黑白之前,所以黑色小格在 CCD 上呈現波谷的圖像,白色小格呈現波峰的圖像,通過找波峰波谷中間值,與鏡頭中心坐標進行做差當作循跡的誤差,以此進行位置式PID控制,停車線所采圖像平均值明顯小于其他位置,可用此判斷停車線,通過紅外二次判斷,其中任意兩個紅外檢測到黑色即為停車,兩次判斷達到精準停車。其中紅外用于 CCD 丟線處理,當在彎道行駛時,CCD 采集灰度值并非垂直彎道,導致誤差值較小,容易丟線,通過紅外檢測到黑線適當增大CCD循跡 PID 參數,使得 CCD 能夠完美循跡。如圖6-9所示。
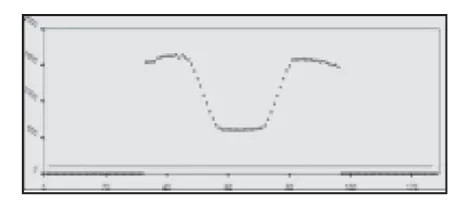
圖6 直道黑色小格圖像

圖7 直道黑色小格圖像

圖8 停車線圖像

圖9 彎道黑色小格圖像
■3.2 勻速時間控制算法
PID 控制器1[5]是一種線性控制器,它根據給定值與實際輸出值構成控制偏差。將偏差的比例(P)、積分(I)和微分(D)通過線性組合構成控制量,對被控對象進行控制,故稱 PID 控制器,原理框圖10所示。
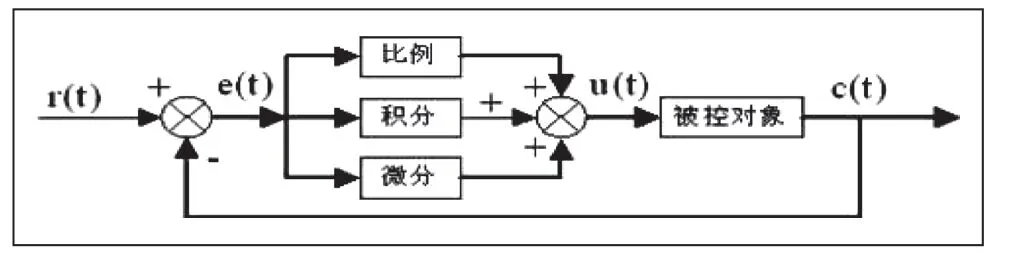
圖10 PID控制器原理圖
在計算機控制系統中,使用數字 PID 控制器,控制規律如式 (1)。

式中KP為比例系數;TI為積分系數;TD為微分系數;T 為采樣周期;e(k )為第k 次偏差;e(k-1)為第k-1 次偏差。
當執行機構需要的是控制量的增量,可以采用增量式PID,由上述公式推導可得:
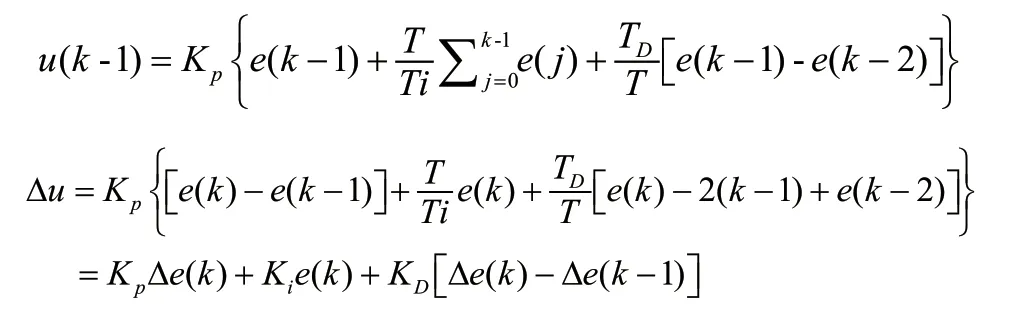
可以看出由于一般計算機控制系統采用恒定的采樣周期T,一旦確定了Kp、Ti、DT,只要使用前后三次測量值的偏差,即可由公式求出控制增量。
4 系統測試與誤差分析
根據本系統的設計要求已完成硬件電路的組裝,控制制定的木板傾斜不同的角度(0°~35°),并手動設置不同的行駛時間,小車沿標記線自動騎線行駛,在停車點停車。最后通過秒表和刻度尺得出實際行駛的時間和小車上標記點到停車標記中心線的垂直距離誤差。板設置在 30°以內時,小車的實際運動時間與設定時間的誤差絕對值皆小于等于1s,且小車上標記點到停車標記中心線的垂直距離誤差小于等于2cm。誤差絕對值如圖11所示。
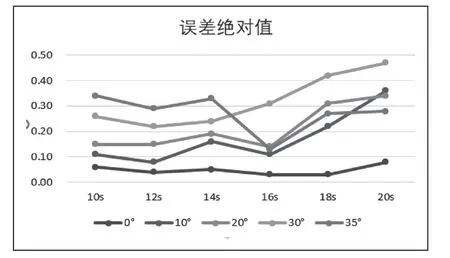
圖11 誤差絕對值
5 結語
本文所設計的坡道行駛電動小車,通過MSP430核心的控制以及位置式 PID 調節,較成功的實現了不同坡度下小車的自動行駛,創新性的使用了線性CCD和紅外模塊結合尋跡,利用增量式PID控制電機,實現了較為準確的行駛時間設定,整個系統結構緊密,完成了坡道小車系統的設計,具有比較可靠的可行性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
