基于重要指示變量和特征的高速公路濃霧短臨預測研究
2021-07-19 10:10:42楊小兵楊再均李洋洋
公路交通科技 2021年6期
楊小兵,楊再均,韓 暉,李洋洋
(1.云南建投基礎工程有限責任公司,云南 昆明 521452; 2.貴州高速黔通建設工程有限公司,貴州 貴陽 550000; 3.北京中交華安科技有限公司,北京 100088)
0 引言
濃霧天氣對高速公路的運營安全產生嚴重影響,極易引發道路交通事故。全國每年高速公路平均交通事故死亡人數近12萬人,其中與交通氣象相關的約占70%[1-2],且因大霧誘發的交通事故大部分為重大交通事故,損失最為嚴重[3]。同時,近年來全球氣候變暖加劇,國內區域氣候濃霧下能見度整體呈現下降趨勢,尤其中東部地區[4-5],低能見度天氣已成為危害行車安全的重要因素之一。因此,準確的濃霧產生預測能夠有效減少交通事故的發生。
霧是由懸浮在近地面空氣中微小水滴和冰晶組成的低能見度的天氣現象[6],其形成受到冷卻條件、水汽條件、凝結條件、天氣條件、層結條件、風力等因素的影響和約束[7-9],對各個氣象要素參數的要求苛刻至極[10]。
對于高速公路濃霧產生預測研究上,賀皓等根據霧產生前地面的氣象要素信息,利用支持向量機的方法進行短臨預測,并取得了不錯的效果[11];周須文等應用天氣學原理和數理統計方法對低能見度霧的生消機理進行研究,建立能見度氣象因子的回歸方程,進而實現對濃霧的預測和預報[12];王月琴等通過采集高速公路部分氣象站點檢測的數據作為樣本,建立基于BP神經網絡的高速公路團霧產生預測模型[13];苗開超等基于LSTM網絡構建了全新的大霧臨近預報框架,實現對大霧臨近進行有效的預測[14];此外,數值預報模式也越來越多地被應用到低能見度的模擬和預報中[15-17]。
綜上,現有的濃霧預測和預報研究中,大多為短期區域性的預測,其準確率和精度相對較差。而針對高速公路的行車特點,濃霧臨近/短臨預測和預報對于保障交通的安全運行尤為重要,為此,本研究在現有研究成果和大數據技術廣泛應用的基礎上,基于交通氣象監測站的歷史數據,利用統計分析方法確定濃霧形成的重要指示變量和變化趨勢,構建了基于“能見度前期振蕩”和“大氣溫度回溫波動”特性的濃霧短臨預測模型,實現對濃霧產生前短時間內的有效預測。
1 歷史氣象數據處理
依托滬寧高速公路沿線江蘇境內竇莊、河陽、仙人山等3處交通氣象監測站4年(2013年1月1日至2016年12月31日)全天候的監測數據(包括時間、能見度、大氣溫度、相對濕度、風速風向、降水量等數據信息,數據采樣間隔為1 min)進行研究。
綜合考慮高速公路行車安全的實際需求,結合數據分析的結果,本研究選取了能見度數值為200 m[18]作為分界閾值點,研究濃霧產生前后各氣象要素的變化情況,具體過程如下:
(1)數據提取
根據本研究目的,提取濃霧產生前3 h的氣象數據來分析濃霧產生過程中各氣象要素的變化特性、趨勢和規律。但受目前交通氣象監測設備數據采集質量影響,存在部分時段數據異常和缺失的狀況,導致在非濃霧產生時段中出現少量數據單元存在能見度低于200 m的狀況,或在濃霧時段會存在個別數據單元能見度遠大于該時段其他數據的狀況。
本研究以氣象數據單元的采樣時間序列為基準,利用“滑動窗+模糊統計”方法對各數據單元進行處理。濃霧產生后會持續一定的時間,通過對濃霧產生前3 h數據進行統計分析,發現濃霧產生前跨度為連續2 h的數據會出現至少一次相同的變化趨勢,故設定滑動窗窗體大小為120個數據單元即2個小時。
為提升數據提取的準確性和速度,采用雙約束并列關聯提取的方式,具體操作如下:
確定當前位置的滑動窗A={xi,xi+1,…,xi+118,xi+119},判斷當前位置能見度持續時長:
(1)
式中,K為滑動窗決策變量,取值為0或1;N為模糊統計數量閾值,本研究通過對氣象數據進行統計分析后其取值為48;NA為滑動窗子窗體A中能見度小于200 m的數據單元個數。
當K=0時,對滑動窗A內部數據單元進行約束條件判定,選取滑動窗A中前60個元素即Ai={xi,xi+1,…,xi+59}進行約束條件判定:
(2)
若K=0,滑動窗Ai向前滑動1個數據單元長度,繼續進行判斷,直至子滑動窗遍歷整個滑動窗A;當K=1時,確定當前滑動窗首元素位置i,分別提取當前位置前3 h數據單元元素即{xi-180,xi-179,…,xi-1},同時為驗證整體的濃霧產生前后的變化過程,并提取其對應位置后2 h數據單元元素即{xi,xi+1,…,xi+119},此時滑動窗向前滑動2個窗體A的長度即300個數據單元長度。
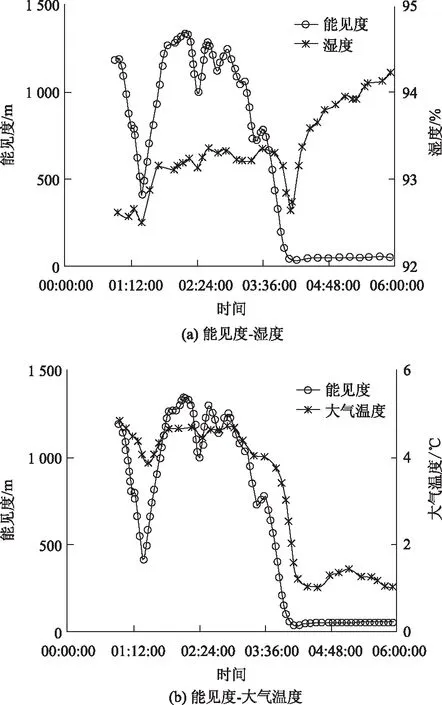
圖1 提取數據結果Fig.1 Result of data extracting
(2)數據剔除及修復
受交通氣象監測站硬件數據采集精度和所處氣候環境的影響,采集的氣象數據會存在部分時間點的數據丟失問題,本研究為保障所建短臨預測模型的準確性,對于數據缺失較為嚴重的樣本進行直接剔除。
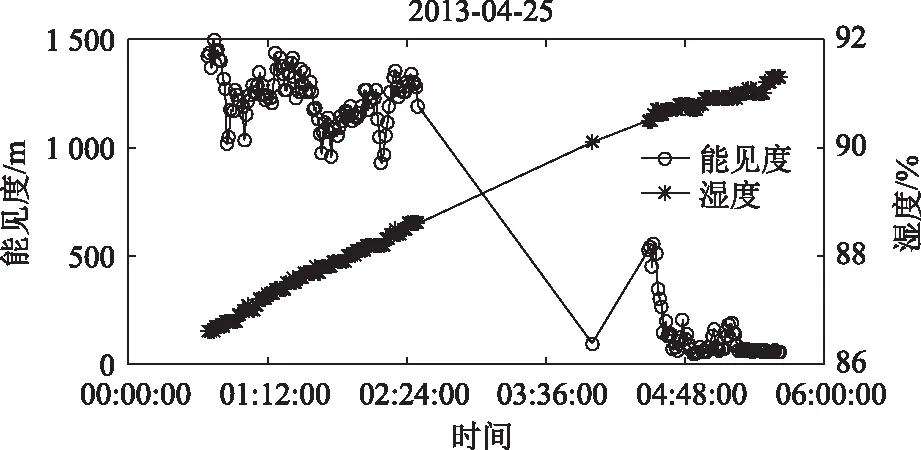
圖2 數據缺失情況Fig.2 Situation of data missing
對于獲取的數據存在個別數據點異常或遺漏,本研究選用滑動窗和線形插值的方法對氣象數據進行數據異常值修復。
首先,濃霧的產生與消散過程是一個緩慢的過程,所以相鄰數據單元間其氣象監測數據的差異也是在一定范圍內波動的。通過對氣象站監測數據的統計分析發現:低能見度情況下,隨著能見度的降低,相鄰數據單元的能見度差值整體上呈現減小的趨勢;當能見度小于等于2 000 m時,相鄰數據單元間能見度值的差異約90%集中在小于等于200 m。本研究選定在低能見度下能見度差值閾值δ作為異常數據判定的依據,取δ=200。
其次,根據獲取數據的整體情況,為保證數據修復過程的合理性和準確性,本研究利用線性插值方法對數據序列中的異常數據、缺失數據進行修復。具體修復過程如下:
(3)
式中,xi為第i個數據單元;Dxi為第i個數據單元的原始能見度值;D′xi為第i個數據單元的修復后能見度值。
最后,利用相同的方法對提取時間段內數據單元的其他要素數據進行異常數據值進行處理和修復,如溫度、濕度等,得到能夠體現濃霧產生過程的各氣象要素數據集。
2 重要指示變量分析
(1)濃霧產生過程中重要指示變量選取
實現對濃霧產生有效預測最為關鍵的是選取重要指示變量和分析變量的變化趨勢和規律特點。本研究所采用的滬寧高速公路沿線江蘇境內交通氣象監測站歷史數據的指標變量共計13項,包括時間、能見度、大氣溫度、相對濕度、降水量、瞬時風速、瞬時風向、2 min風速、2 min風向、10 min風速、10 min風向、0 cm地溫、10 cm地溫,而從數據的整體有效性和數據的準確性來看,僅時間、能見度、大氣溫度、相對濕度、降水量、瞬時風速的監測結果較為準確。
根據目前濃霧預測研究所采用的氣象變量指標和結果,本研究所采用的數據可以滿足對濃霧產生進行短臨預測的需求,同時結合本研究目的,選取了能見度、相對濕度和瞬時風速作為濃霧短臨預測模型的重要指示變量。
(2)濃霧產生過程中重要指示變量統計分析
通過對滬寧高速公路沿線江蘇境內交通氣象監測站的歷史數據進行預處理獲得濃霧產生前后各氣象要素數據,進而利用MATLAB工具對其數據進行統計分析來獲取相關重要指示變量在濃霧產生過程中的特點,具體結果見表1所示。
通過表1和圖3可以發現:在濃霧產生的整個過程中,大氣相對濕度、風速、能見度等相關氣象因子變化均具有一定的規律和特點。當濃霧逐漸形成的過程中,大氣相對濕度整體處于85%以上,風速的大小在一定小范圍內浮動變化([0,4]m/s),且
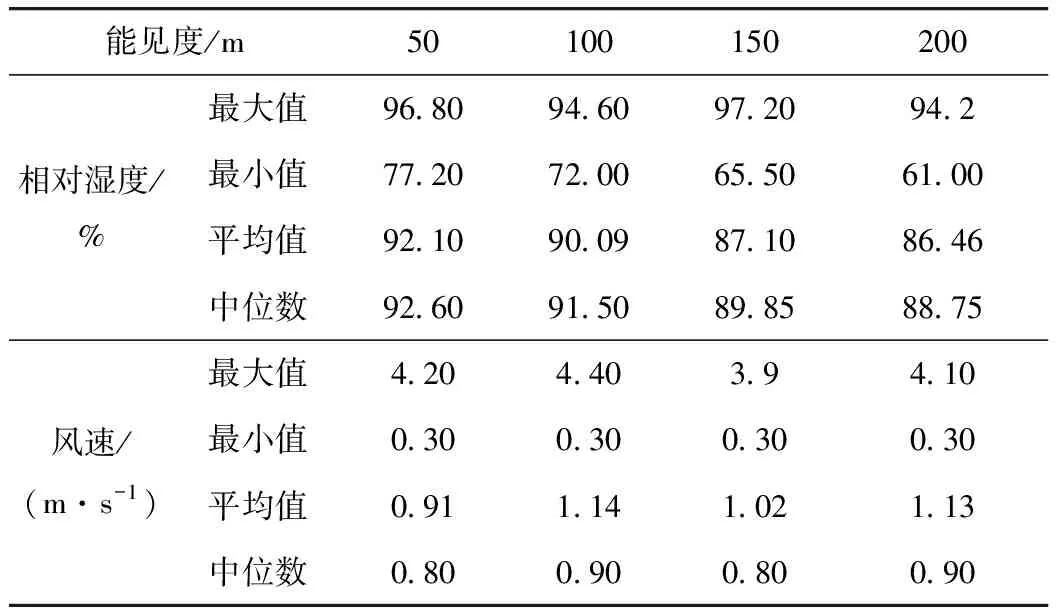
表1 不同濃度條件下的濃霧各指示變量分布的情況Tab.1 Distribution of dense fog indicator variables under different concentration conditions
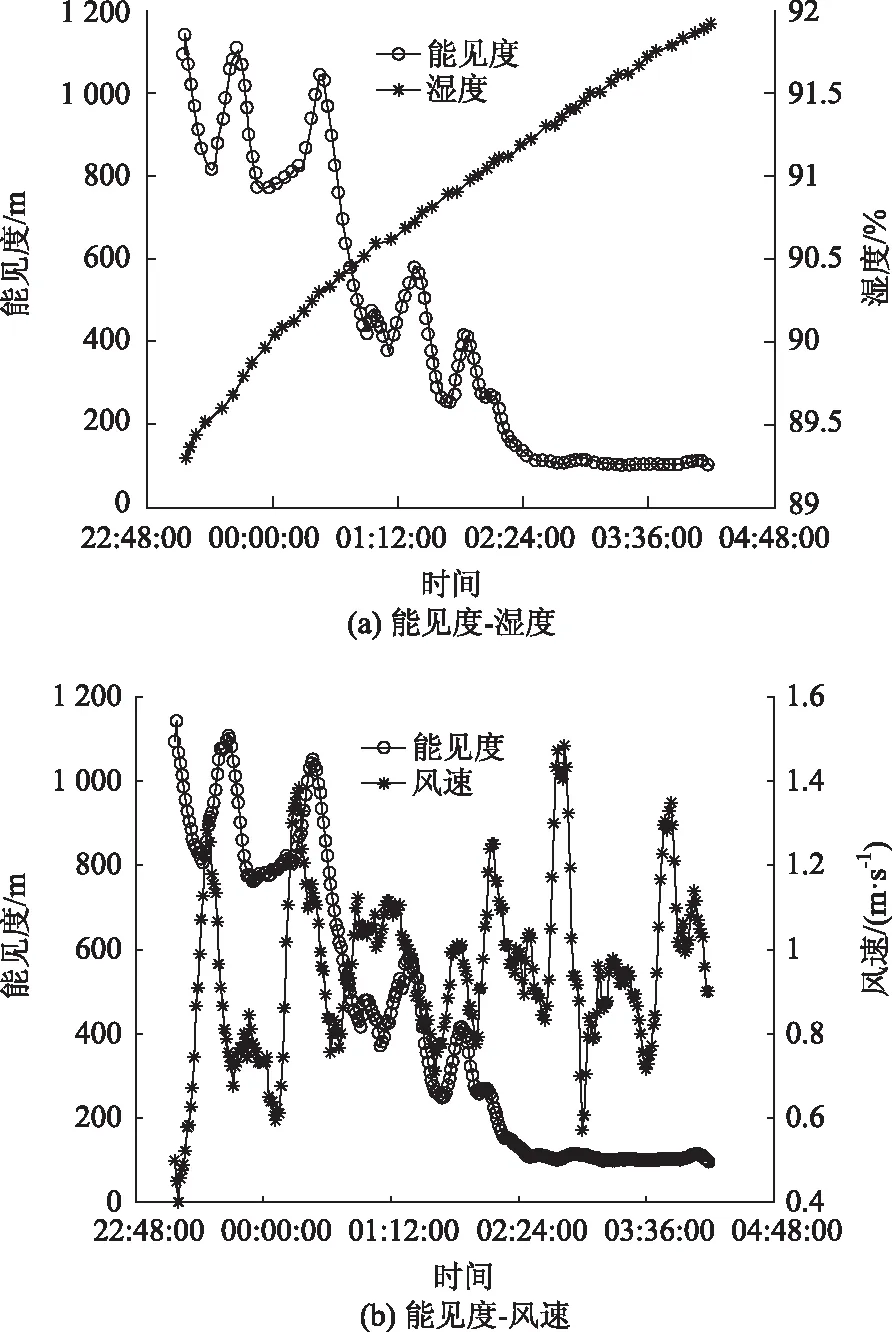
圖3 濃霧產生過程中重要指示變量的變化情況Fig.3 Changes of important indicator variables in dense fog generation process
普遍偏低,主要集中于1 m/s左右;隨著環境的能見度逐漸降低,大氣相對濕度逐漸增加,當濃霧產生后,其環境的能見度等指標逐漸趨于穩定、下降趨勢減緩,濕度的上升趨勢也減緩。
(3)濃霧產生過程中重要指示變量變化特點分析
根據滬寧高速公路沿線江蘇境內交通氣象監測站歷時數據的分析結果及現有研究成果,可以發現:濃霧形成前近地層空氣中空氣濕度近乎達到飽和態,其能見度的降低不都是逐漸降低的,濃霧在產生之前,普遍會出現一個前期振蕩。前期振蕩現象是突然出現的,持續時間短,能見度值不低,也不穩定,一般介于200~800 m之間波動,這可被視為突發性濃霧的前奏,本研究稱之為能見度前期振蕩,如圖4所示。
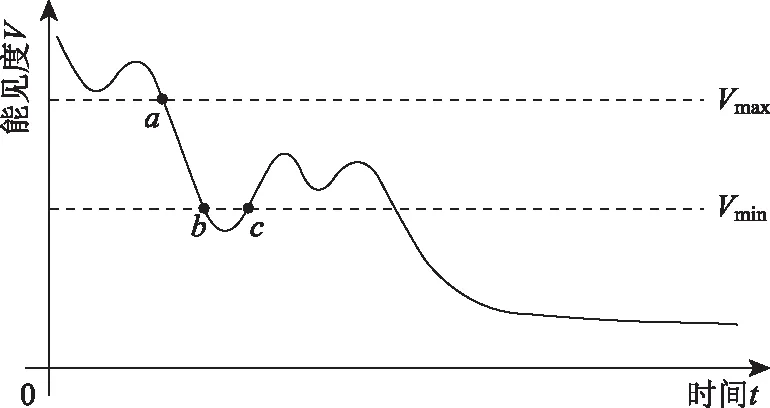
圖4 能見度前期振蕩Fig.4 Visibility early oscillation
能見度前期振蕩具有以下兩個特征:
(1)從ta到tb的時間大多在10~40 min之間,從tc到出現持續濃霧的時間大約是2~3 h;
(2)前期振蕩是突然出現的,但能見度值在一定范圍內變化。
此外,低能見度穩定濃霧天氣過程在形成前存在先期振蕩,表明突發性濃霧的形成不是一次完成的,究其成因是近地層大氣中初次產生凝結后,存在凝結潛熱釋放的物理過程,加上霧對地面輻射的阻隔,使近地層的氣溫有所上升。研究表明[19]:穩定濃霧在爆發性下降前,大氣溫度都經過了“下降-小幅回升-繼續下降”的過程,本研究稱之為大氣溫度回溫波動,如圖5所示,溫度下降過程中的小幅上升對能見度的突然下降有很好的預測作用。
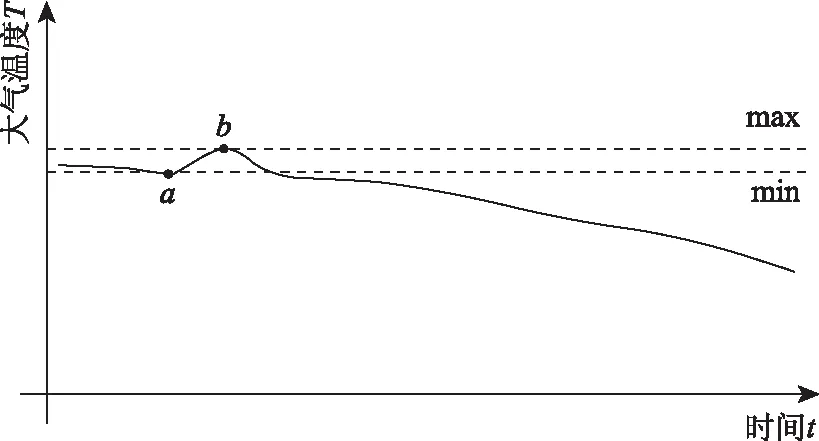
圖5 大氣溫度回溫波動Fig.5 Atmospheric temperature return fluctuation
大氣溫度回溫波動具有以下特征:
(1)大氣溫度波動的幅度在一定范圍內波動;
(2)從ta到tb的時間大多在10~40 min,從tb到出現持續濃霧的時間30 min~3 h不等。
3 基于“能見度前期振蕩”和“大氣溫度回溫波動”特性的濃霧短臨預測模型
基于滬寧高速公路沿線江蘇境內交通氣象監測站數據分析結果:在能見度爆發下降前相對濕度和風速大小的波動情況具有一定的規律特點,為此在進行濃霧短臨預測時必須先滿足兩個先決條件即:
(4)
式中,Humi為當前時刻i的相對濕度;Windi為當前時刻i的風速;Nhum,Nwind分別為預測模型先決條件閾值。
在滿足當前時刻先決條件閾值約束的基礎上,本研究利用滑動窗口算法設定數據實時處理分析過程,并基于能見度前期振蕩辨識算法和大氣溫度回溫波動辨識算法對濃霧產生前的雙特性變化趨勢進行辨識,進而實現對濃霧產生前有效預測。
(1)滑動窗口算法
本研究利用滑動窗口算法對能見度前期振蕩辨識算法和大氣溫度回溫波動辨識算法的遍歷規則進行了設定,具體步驟如下:
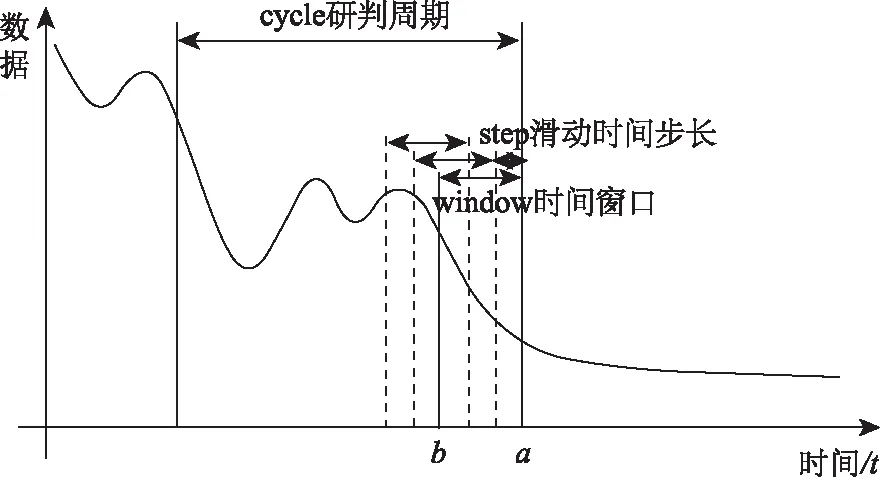
圖6 滑動窗口算法示意圖Fig.6 Schematic diagram of sliding window algorithm
Step1:研判周期確定及數據預處理
以氣象站當前時間ta獲取的數據單元為基準,往前選擇一個時間點tc,ta至tc形成一個研判周期時長定義為cycle;利用本研究數據預處理方法對研判周期內的數據進行處理。
Step2:研判周期內數據整體性約束判別
為提升研判的準確性,需確定周期cycle中所有數據單元的整體水平進行先驗處理,即
(5)

Step3:滑動窗體確定
在cycle內選擇一個時間點tb,形成一個時間窗口定義為window,能見度前期振蕩和大氣溫度回溫波動辨識在window內執行,根據兩個現象出現的特征,確定window時間長度。
Step4:窗體滑動規則
window在cycle內依次遍歷,每次往前推進一個短時間段,這個時間段為滑動時間步長,定義為step,step時間長度為一個數據單元長度;直至window遍歷完整個cycle,判定此次預測過程結束。
(2)能見度前期振蕩辨識算法
根據能見度前期振蕩的特征,判定:
(6)
式中,Svis為能見度前期振蕩特性決策變量,取值為0或1;VIS_MAX,VIS_MIN分別為能見度前期振蕩上限值和下限值;VISmin,VISmax分別為能見度滑動窗window內數據序列的平均能見度最大值和平均能見度最小值。
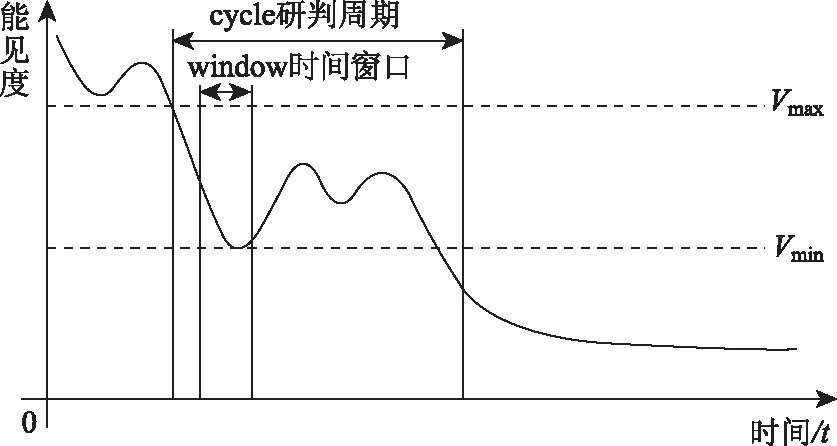
圖7 能見度前期振蕩辨識算法示意圖Fig.7 Schematic diagram of identification algorithm of visibility early oscillation
其中:
(7)
式中,VISmax1,VISmax2分別為能見度滑動窗window內數據序列中兩個最大能見度值;VISmin1,VISmin2分別為滑動窗window內能見度數據序列中兩個最小能見度值。
(3)大氣溫度回溫波動辨識算法
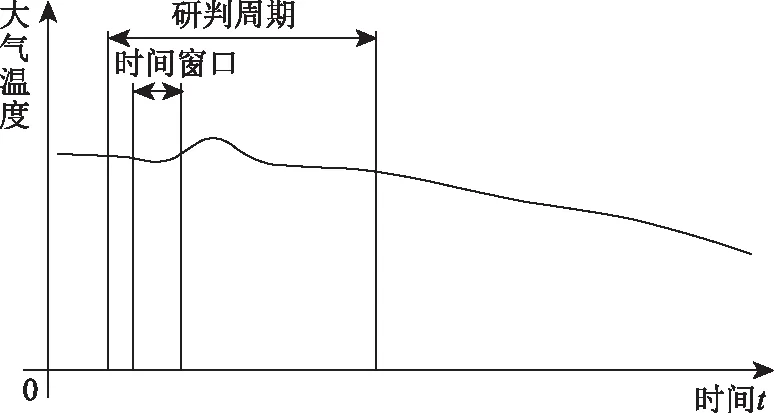
圖8 大氣溫度回溫波動辨識算法Fig.8 Schematic diagram of identification algorithm of atmospheric temperature return fluctuation
根據大氣溫度回溫波動的特征,判定:
(8)
式中,Tat為大氣溫度回溫波動特性決策變量,取值為0或1;AT_RANGE為大氣溫度回溫波動的幅度;ΔAT為大氣溫度滑動窗window內數據序列中平均最大溫差;Tmax1,Tmax2分別為大氣溫度滑動窗window內數據序列中兩個最大溫度值所對應的時間;Tmin1,Tmin2分別為滑動窗window內能見度數據序列中兩個最小溫度值所對應的時間。
其中:
(9)
式中,ATmax1,ATmax2分別為大氣溫度滑動窗window內數據序列中兩個最大溫度值;ATmin1,ATmin1分別為大氣溫度滑動窗window內數據序列中兩個最小溫度值。
綜上,當能見度前期振蕩辨識結果和大氣溫度回溫波動辨識結果滿足:
(10)
判定當前時刻未來1~3 h內將會產生濃霧。
4 模型參數標定及應用效果分析
基于滬寧高速公路沿線江蘇境內3個交通氣象監測站2013—2016年的歷史數據,提取出其濃霧產生后能見度小于200 m且持續穩定的濃霧產生時前3個小時的數據單元,進而對提取數據進行預處理,共計獲得有效數據組128組,其中2013—2015年共計105組,2016年共計23次組。為實現對基于“能見度前期振蕩”和“大氣溫度回溫波動”特性的濃霧短臨預測模型的參數標定和應用效果分析,本研究將2013—2015年共計105組濃霧產生前3 h的數據作為樣本數據用于模型參數的標定,進而根據模型標定結果對2016年的氣象數據進行濃霧短臨預測辨識,通過對比模型辨識結果和真實數據結果來驗證模型的有效性。具體如下:
(1)模型條件閾值確定
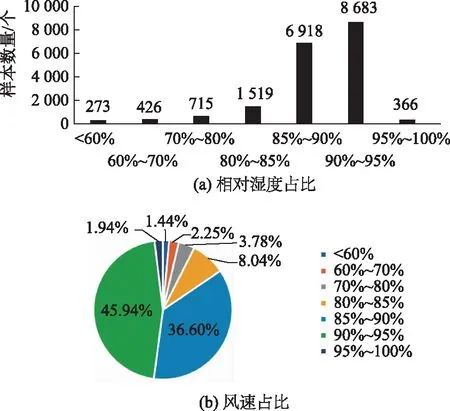
圖9 2013—2015年濃霧產生前3 h相對濕度統計Fig.9 Statistics of relative humidity 3 h before occurrence of dense fog in 2013—2015
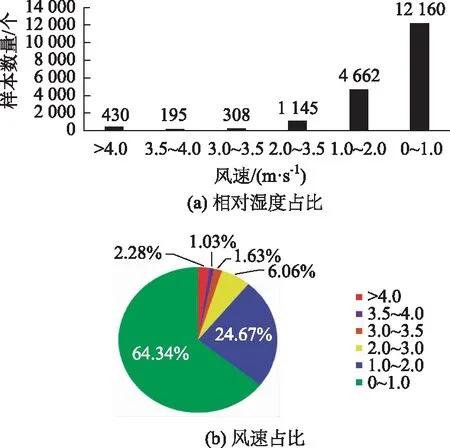
圖10 2013—2015年濃霧產生前3 h風速情況Fig.10 Statistics of wind speed 3 h before occurrence of dense fog in 2013—2015
通過對2013—2015年歷史數據的整體統計分析:濃霧發生前3 h相對濕度在85%及以上的比例達到84.48%,相對濕度在80%及以上的比例達到92.52%;而風速在3 m/s及以下的比例達到95.06%。為此,本研究對于模型先決條件閾值確定上選擇:
(11)
而對于滑動周期cycle內數據單元的整體性水平約束閾值的確定上,本研究分別對各組數據進行整體性分析,分析結果如表2所示。

表2 濃霧產生前相對濕度和風速的整體性水平Tab.2 Overall level of relative humidity and wind speed before occurrence of dense fog
通過表2所統計出的結果,在滿足整體性水平較好同時需要能夠保證預測結果準確性,對滑動窗cycle設定為150 min,對整體性水平約束閾值設定為:
(12)
(2)模型辨識算法參數確定
對于能見度前期振蕩和大氣溫度回溫波動辨識算法相關參數的確定上,本研究直接對已提取的105組濃霧產生前其能見度和大氣溫度的變化趨勢進行提取,獲取各組數據中距離當前時刻最近的能見度前期震蕩位置點和大氣溫度回溫波動位置點的實際波動情況,進而進行統計分析得到如下結果。

圖11 2013—2015年濃霧產生前能見度前期震蕩和 大氣溫度回溫變化情況Fig. 11 Changes of visibility early oscillation and atmospheric temperature return fluctuation before occurrence of dense fog in 2013—2015
通過對105組數據的濃霧產生前的能見度前期震蕩和大氣溫度回溫統計(圖10)可以發現:濃霧產生前會出現明顯的能見度前期震蕩和大氣溫度回溫波動的情況,同時波動產生的時間點和波動值具備一定分散性,但同時也具備一定的變化規律,能見度極小值主要集中在200~800 m之間,而極大值主要集中在500~1 400 m之間,同時二者的差值主要集中在250~650 m之間;能見度振蕩持續時長在10~40 min,大氣溫度回溫波動在0.2~0.9 ℃。
基于此,單一且固定的模型參數變量難以讓模型獲取準確而又確定的辨識結果,為此本研究采用序列式模型參數用于模型辨識,即

(13)
而對于滑動窗window的確定上,根據對數據分析的結果,本研究選擇能夠滿足85%的數據組需求的值定為滑動窗的大小,即滑動窗window為30。
在此基礎上,本研究進而利用MATLAB處理工具對滬寧高速公路沿線江蘇境內3個交通氣象監測站2016年數據進行濃霧產生短臨預測,共獲取數據組共計29組,其中與2016年真實數據相匹配數據共計22組,有效率達到75.86%,而漏檢率僅為4.35%。
綜上,本研究基于能見度前期振蕩特性和大氣溫度回溫波動特性的濃霧短臨預測模型可以有效的對濃霧進行短臨預測,同時預測結果與模型參數密切相關,結合實際的歷史數據選定合適的模型參數對模型預測的準確率有重要的影響。
5 結論
通過對滬寧高速公路沿線江蘇境內交通氣象監測站獲取的數據進行統計分析,發現濃霧發生過程中環境能見度、大氣溫度、相對濕度、風速等重要指示變量對高速公路沿線濃霧短臨預測具有較好的指示意義。基于此,本研究利用滑動窗口算法,結合滬寧高速公路沿線交通氣象歷史數據的分析結果,提出了基于能見度前期振蕩特性和大氣溫度回溫波動特性的濃霧短臨預測模型,實現了基于當前時刻氣象數據及其歷史數據對濃霧產生進行有效的短臨預測,能及時警示公路運營管理部門提前做好預防處理準備,降低因突發濃霧而造成的交通事故發生的概率。
當然,本研究尚存在不足和需要改進的地方,具體總結如下:
(1)本研究預測模型參數標定的數據樣本有限,使得模型的預測準確率受限;
(2)預測模型參數標定結果與地區氣象數據密切相關,未來研究需融入模型反饋機制,構建模式庫建立多模式模型參數匹配機制來提升模型的應用性和預測準確性;
(3)本研究對于濃霧短臨預測因素僅考慮了能見度、大氣溫度、濕度和風速等影響,未來可以增加其他因素對濃霧短臨預測的影響,從而提升預測準確率。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
軍事文摘(2023年10期)2023-06-09 09:15:06
空間科學學報(2021年4期)2021-08-30 08:31:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27
核科學與工程(2015年4期)2015-09-26 11:59:03
世界知識畫報·藝術視界(2010年9期)2010-12-31 00:00:00