基于模糊PID技術的排氣壓力精確控制仿真研究
2021-07-19 01:18:54姜文雍黃增陽
農機使用與維修 2021年7期
姜文雍,黃增陽,毛 方,劉 毅
(1.衢州職業技術學院 機電工程學院,浙江 衢州 324000;2.衢州市質量技術監督檢測中心,浙江 衢州 324000;3.哈爾濱華德學院,哈爾濱 150025)
0 引言
空氣壓縮機是一種通過壓縮空氣體積提高氣體壓力能的裝置,有“通用機械”之稱,其用途極廣,在各行各業中都得到廣泛應用。根據空壓機相關產品標準規定及要求,空壓機制造企業要對每臺空壓機做能源效率和容積流量的出廠檢測[1]。排氣壓力是空壓機性能檢測的一個重要影響因素,在實際檢測過程中,由于脈動的存在導致排氣壓力產生波動較大,進而影響空壓機容積流量、能源效率等性能指標的準確測量,因此如何提高壓縮氣體壓力自動調節的精確度始終是一個技術難題[2]。本文結合空壓機能源效率快速檢測的特點,并基于模糊PID控制原理,對空壓機能源效率快速檢測裝置的排氣壓力控制系統進行設計及仿真研究,以期實現對排氣壓力的精確控制。
1 模糊控制的基本原理
模糊控制是以模糊數學為理論依據的一種自動控制系統,能夠模擬人類的模糊推理以及決策過程。模糊控制并不需要建立具體的控制系統模型,只要將控制對象模糊化,再將專家的實際工作經驗編成模糊控制規則,然后根據這些規則來控制系統。模糊控制的原理框圖如圖 1所示[3]。
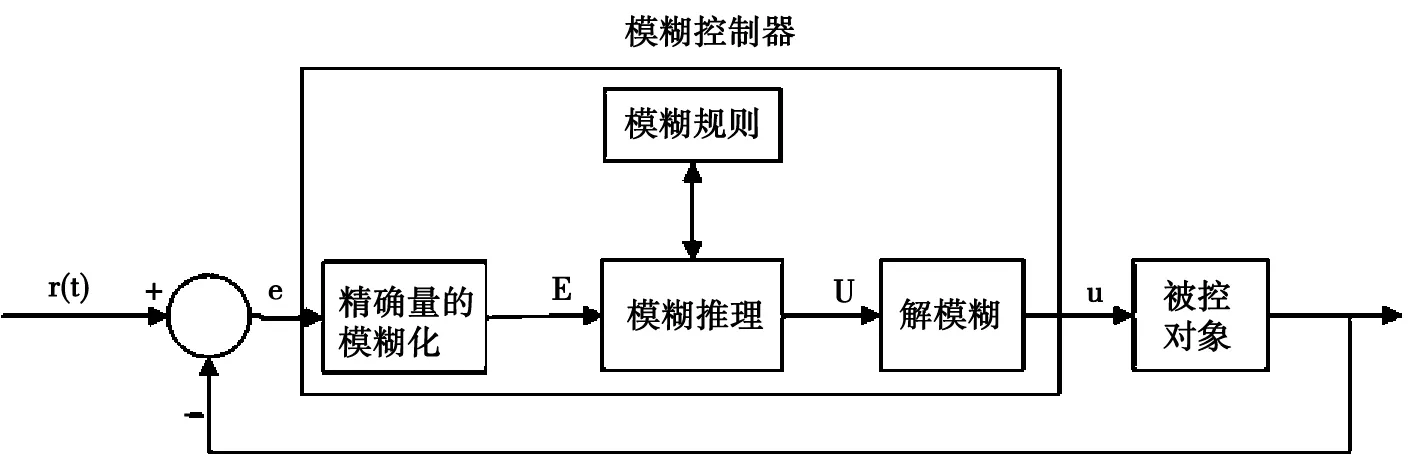
圖1 模糊控制原理圖
模糊控制器根據輸入變量的數量可以分為一維模糊控制器、二維模糊控制器以及三維模糊控制器等。模糊控制器輸入變量多則控制精度高,但是同時也會導致模糊控制規則增多,使控制程序變的復雜。因此,本文選擇二維模糊控制器(圖2),以誤差和誤差變化率作為模糊控制器的輸入。這樣既能獲得不錯的控制效果,也較容易在計算機上實現。
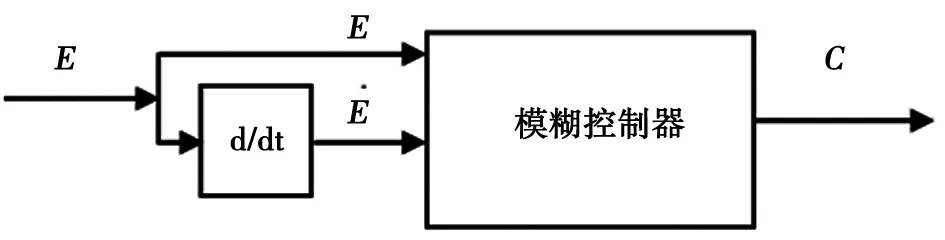
圖2 二維模糊控制結構簡圖
2 排氣壓力的控制問題
傳統PID控制技術具有結構簡單、易于實現等優點,所以目前多數工業過程控制中廣泛使用的還是傳統PID控制技術。但是由于空壓機排氣壓力控制是一種非線性系統,傳統PID控制技術的控制效果并不理想。模糊控制的優點是穩定性強,而且適應性較好,但是有對穩態誤差反應慢、控制精度低等缺點[4]。因此,為了兼顧以上兩種控制方法的優點,實現排氣壓力的精確控制,本文選擇了模糊PID 控制技術,模糊PID控制器由模糊控制器和PID控制器組成。
空壓機能源效率快速檢測裝置的排氣壓力控制系統原理如圖 3所示。
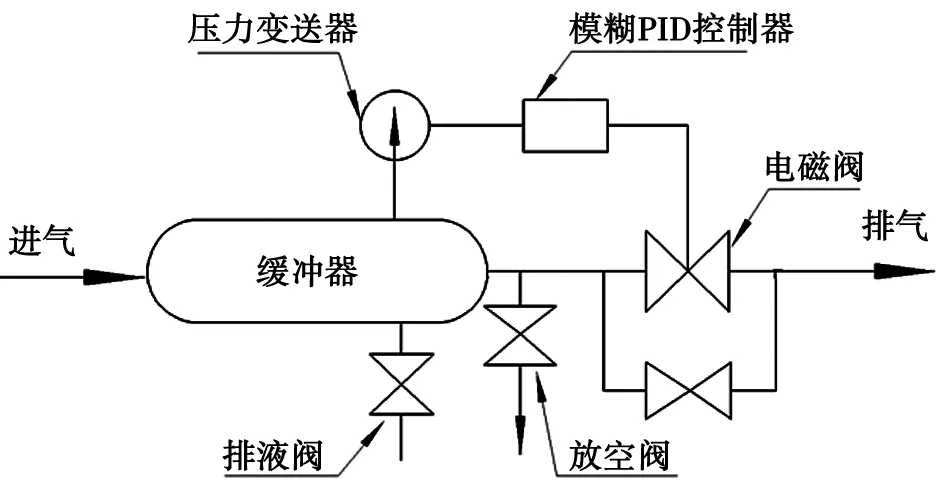
圖3 排氣壓力控制系統原理圖
緩沖器中壓縮氣體的壓力值由壓力變送器測得后傳輸到模糊PID控制器中,后者先計算出測量壓力和設定壓力之間的差值E以及差值變化率EC,然后再根據模糊控制規則控制電磁閥動作,從而實現對排氣壓力精確實時控制。
3 模糊PID 控制器設計
壓力變送器測量到的壓力與設定壓力之間的差值E以及差值的變化率EC作為模糊PID控制器的兩個輸入值,其取值范圍均為[-3,3],模糊子集為{NB,NM,NS,Z,PS,PM,PB}。模糊PID 控制器的輸出量為Δkp、Δki、Δkd,它們的模糊子集同樣為{NB,NM,NS,Z,PS,PM,PB}[5]。在控制排氣壓力的過程中,模糊PID控制器持續監測差值E以及差值的變化率EC,然后根據模糊控制規則(表 1、表 2、表 3)以及式(1)~式(3),動態調整kp、ki、kd的數值[4]。模糊PID 控制器的結構原理如圖 4所示[3]。
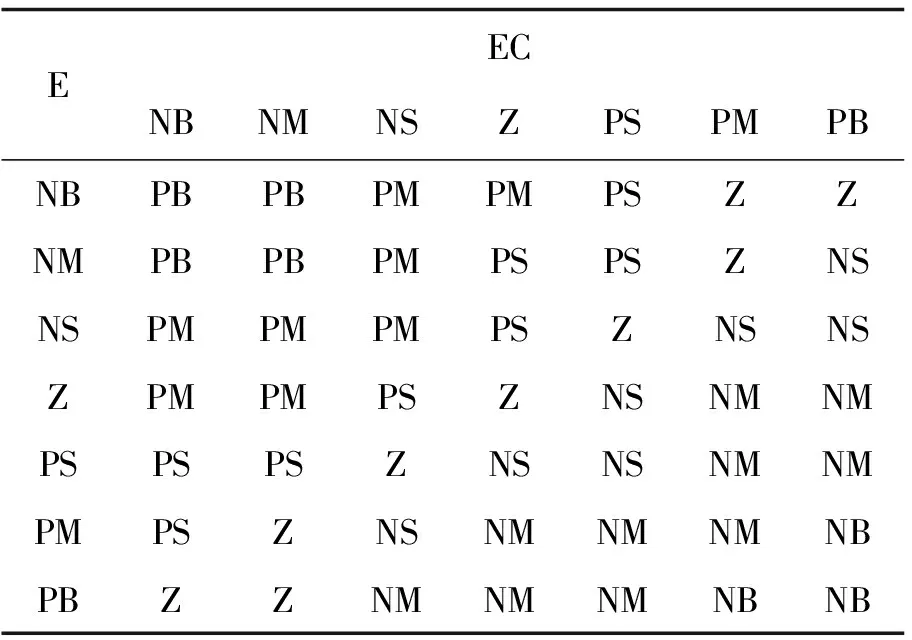
表1 Δkp的模糊控制規則表
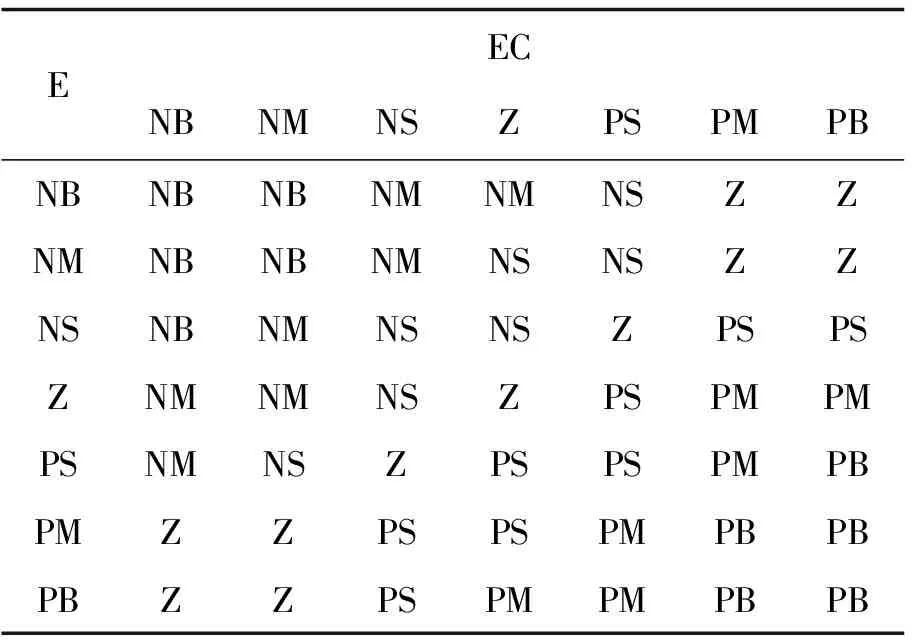
表2 Δki的模糊控制規則表

表3 Δkd的模糊控制規則表

圖4 模糊PID 控制器結構原理圖
(1)
(2)
(3)

4 控制系統的Matlab仿真
本文使用Matlab軟件的simulink模塊對排氣壓力控制系統進行仿真,建立模糊PID控制仿真模型如圖 5所示。

圖5 模糊PID控制仿真模型
在Matlab命令窗口輸入“fuzzy”,打開模糊邏輯編輯窗口,設置模糊控制器為2輸入3輸出的二維模糊控制結構,如圖 6所示。
將模糊控制規則表 1、表 2、表 3輸入到模糊邏輯編輯窗口中,編輯好模糊控制規則,得到Δkp、Δki、Δkd的輸出曲面圖如圖6、圖7、圖8、圖9所示。
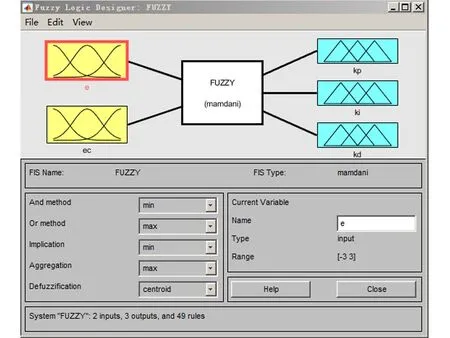
圖6 模糊邏輯編輯窗口
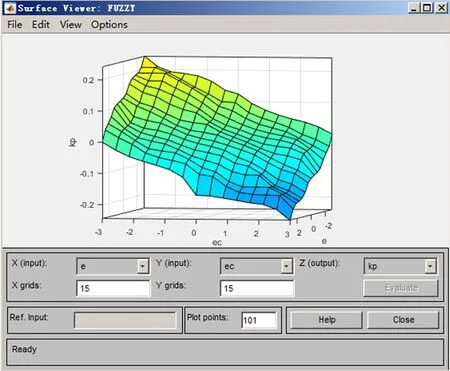
圖7 Δkp輸出曲面圖

圖8 Δki輸出曲面圖

圖9 Δkd輸出曲面圖
5 結果與討論
設置采樣時間為20 s,并在第10 s時輸入一個干擾信號,表示排氣過程中出現的壓力脈動現象。Simulink仿真結果如圖 10所示。

圖10 普通PID控制和模糊PID控制對比圖
從仿真結果可以看出模糊PID控制的效果要優于普通PID控制。模糊PID控制不僅超調量小,而且能更快的達到平衡狀態。當排氣壓力出現脈動的時候,模糊PID的控制效果也要優于普通PID控制。因此,空壓機能源效率快速檢測裝置的排氣壓力控制系統采用模糊PID控制技術可以實現排氣壓力的動態穩定。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
海峽科技與產業(2016年3期)2016-05-17 04:32:12