應用LoRa 通信協(xié)議的松散式有界星群構(gòu)型設計
2021-07-18 08:53:12張曉杰趙靈峰
上海航天 2021年2期
張曉杰,張 璇,朱 野,趙靈峰
(中國科學院 微小衛(wèi)星創(chuàng)新研究院,上海 201203)
0 引言
近年來,隨著空間任務的逐漸復雜化(如空間衛(wèi)星分布式探測、衛(wèi)星編隊執(zhí)行合成孔徑雷達或干涉儀任務等),僅靠單顆衛(wèi)星完成一項飛行任務存在越來越多的局限性。采用低成本、短周期和高功能密度小衛(wèi)星構(gòu)建衛(wèi)星集群,成員衛(wèi)星之間通過信息流、能流和物流等進行互聯(lián),且具備一定的自組織能力,能為創(chuàng)新性的航天應用場景提供支持。
衛(wèi)星集群可分為衛(wèi)星編隊和衛(wèi)星星群[1]。衛(wèi)星編隊具有嚴格的隊形要求及控制要求[2],一般設計為同軌道高度、同軌道面的前后串聯(lián)式構(gòu)型,以降低軌道控制投入,例如美國“21 世紀技術(shù)衛(wèi)星”(TechSat21)計劃[3]和瑞典“棱鏡”(PRISMA)計劃[4]。衛(wèi)星星群無嚴格隊形要求,一般通過對航天器相對運動的建模及運動周期的研究,實現(xiàn)將衛(wèi)星控制在一定范圍內(nèi)保證星間的正常互聯(lián)[5],例如美國“未來、快速、靈活、模塊化、自由飛行”(F6)計劃[6-8]、“蟻群”(ANTS)計劃[9-11]及英國“天基鏡群”(Satellite Cluster with a Multi-mirror System for Asteroid Deflection)方案[12]。
無論是衛(wèi)星編隊還是衛(wèi)星集群,衛(wèi)星間均需按照一定空間自組織網(wǎng)絡進行數(shù)據(jù)互聯(lián),英國“基于航天智能的安全集成分布式可重構(gòu)傳感器網(wǎng)絡”(ESPACENET)項目對空間自組織網(wǎng)絡開展了一系列研究,主要開發(fā)基于皮納衛(wèi)星的分布式、靈活、可進化、可重構(gòu)、智能空間傳感器網(wǎng)絡。此外,葡萄牙航空防御公司TEKEVER 也曾提出將地面無線自組網(wǎng)技術(shù)(Ad hoc)引入空間,作為星間通信協(xié)議的方案,但Ad hoc 網(wǎng)絡對拓撲變化的高適應性也增加了網(wǎng)絡路由的維護成本[13],對網(wǎng)絡各節(jié)點的功耗提出較高要求,與低成本、低功耗的星群特性相違背。
LoRa(Long Rang)是一種非授權(quán)頻譜的LPWAN 無線技術(shù),具有遠距離、低功耗、低成本、覆蓋容量大等特點[14]。2013年8月,Semtech公司發(fā)布了首款LoRa 芯片,接收靈敏度可達—148 dBm,同時功耗極低,1 節(jié)5 號電池理論上可供終端設備工作10 a 以上。2018 年,南京郵電大學在分析地面物聯(lián)網(wǎng)中LoRa 性能的基礎上,對LoRa 在低軌衛(wèi)星物聯(lián)網(wǎng)下的性能進行了研究[15];2019 年英國開發(fā)了一種基于LoRa 協(xié)議的新型物聯(lián)網(wǎng)衛(wèi)星星座,該星座中每顆小衛(wèi)星上基于LoRa 的空間網(wǎng)關均可通LoRaWAN 通信協(xié)議從地面或海上的物聯(lián)網(wǎng)設備接收短數(shù)據(jù)消息[16];同年12 月,國防科技大學智能科學學院對基于LoRa 協(xié)議的衛(wèi)星應急通信的多普勒效應進行了研究,完成了基于LoRa 的衛(wèi)星與地面雙向?qū)崟r數(shù)據(jù)通信試驗,證明LoRa 信號能有效地應用于低軌道衛(wèi)星物聯(lián)網(wǎng)[17]。
本文基于LoRa 協(xié)議在提高通信距離、消除干擾、擴展系統(tǒng)容量等方面的優(yōu)勢[18],提出將LoRa 技術(shù)應用于衛(wèi)星星群,實現(xiàn)星群衛(wèi)星間的信息互聯(lián),并依據(jù)LoRa 協(xié)議的特點提出了一種與之匹配的松散式有界星群構(gòu)型的設計方法。該星群構(gòu)型可在一定空間內(nèi)容納多顆小衛(wèi)星(100~1 000 kg),且在軌構(gòu)型維護簡單,能有效降低構(gòu)型維持成本,進一步實現(xiàn)星群低功耗的設計需求。另外,該星群構(gòu)型適用范圍廣泛,對于其他通信協(xié)議下無特殊隊形要求的、有界星群系統(tǒng)同樣適用。
1 基于LoRa 協(xié)議的星群衛(wèi)星通信
LoRa協(xié)議與Wi-Fi、藍牙、ZigBee等現(xiàn)有成熟商用的無線技術(shù)相比,具有遠距離、低功耗、低成本、覆蓋容量大等優(yōu)點,適合于在長距離發(fā)送小數(shù)據(jù)量且使用電池供電方式的物聯(lián)網(wǎng)終端設備。基于貨架終端節(jié)點傳感器及開放的LoRaWAN 協(xié)議的支持,可實現(xiàn)低成本、短周期和高功能密度小衛(wèi)星集群的構(gòu)建。
根據(jù)LoRa 的網(wǎng)絡架構(gòu)及星群的應用需求,設計一主星攜多輔星的星群架構(gòu),每顆輔星攜帶1 片內(nèi)置LoRa 芯片,自成一獨立終端節(jié)點。主星集成了網(wǎng)關/集中器、網(wǎng)絡服務器及應用服務器功能,通過觸發(fā)傳輸方式實現(xiàn)對每顆輔星探測數(shù)據(jù)及位置信息的周期性獲取,完成探測結(jié)果預判及下傳,接收地面任務指令,自主完成任務分解及規(guī)劃,生成輔星任務控制指令及軌控需求。輔星節(jié)點攜帶特定傳感器,實現(xiàn)任務數(shù)據(jù)的采集,并采用Class A 工作模式(觸發(fā)式終端模式,本身不會主動發(fā)送數(shù)據(jù),在接收到網(wǎng)關的觸發(fā)指令或數(shù)據(jù)后,進行兩次短時間的下發(fā)數(shù)據(jù)[14]),接收主星任務指令及軌控指令,將任務數(shù)據(jù)及本星位置信息傳輸給主星,并按照軌控指令完成軌道維持。星群拓撲構(gòu)型數(shù)據(jù)流示意圖如圖1 所示。
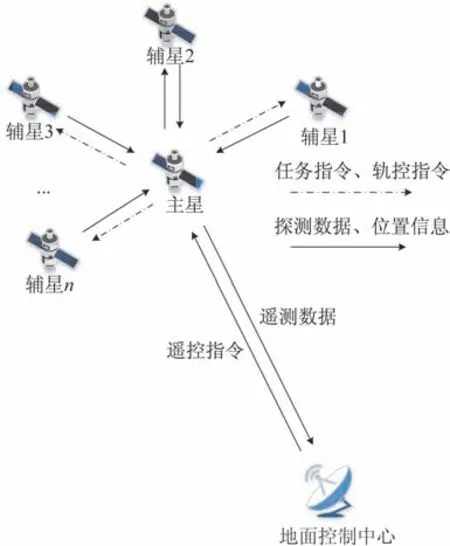
圖1 星群拓撲構(gòu)型數(shù)據(jù)流示意圖Fig.1 Data flow diagram of satellite cluster topolpgy configuration
由于遙控資源約束,任務規(guī)劃及星群拓撲構(gòu)型維持或重構(gòu)需星群系統(tǒng)在軌自主完成,尤其是星群拓撲構(gòu)型維持或重構(gòu),是系統(tǒng)安全、穩(wěn)定運行的基礎。根據(jù)LoRa 協(xié)議對于節(jié)點間位置的約束,設計一種簡化的在軌星群拓撲構(gòu)型及軌道保持策略是將LoRa 協(xié)議應用到空間星群系統(tǒng)的關鍵環(huán)節(jié)。
2 基于LoRa 協(xié)議的星群拓撲構(gòu)型
LoRa 協(xié)議對于節(jié)點位置的要求主要在于通信距離的約束,目前地面距離約束為50 km,考慮空間環(huán)境特點,距離約束值可考慮放寬,如500 km。據(jù)此,設計一種一主星攜多輔星的松散式有界星群,將所有輔星節(jié)點均安全穩(wěn)定地控制在主星節(jié)點有效通信范圍內(nèi),且設計碰撞規(guī)避策略,實現(xiàn)對LoRa通信協(xié)議的支撐。
首先,分析軌道參數(shù)對兩星相對運行距離的影響。設置主星為一確定軌道參數(shù),輔星軌道通過改變主星軌道參數(shù)的某一個量獲得,通過仿真主、輔星距離變化的關系,找到軌道參數(shù)對于兩星相對位置關系的影響。
主星初始軌道參數(shù)見表1。調(diào)整某一個軌道參數(shù),其他軌道參數(shù)均相同,可得到6 組輔星軌道參數(shù),見表2。

表1 主星初始軌道參數(shù)Tab.1 Initial orbital parameters of the principal satellite

表2 6 種輔星的初始軌道參數(shù)Tab.2 Six groups of initial orbital parameters of auxiliary satellites
選用HPOP 模型,假設主、輔星面質(zhì)比相同,仿真分析衛(wèi)星的6 個軌道參數(shù)單獨對兩星間距離的影響,如圖2 所示。
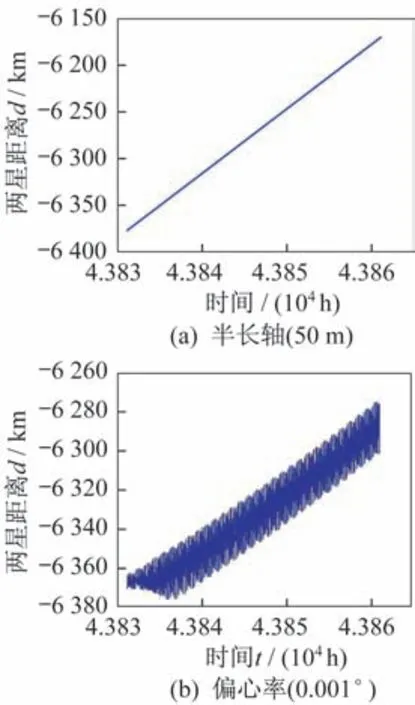
圖2 某一初始軌道參數(shù)不同的兩顆衛(wèi)星間距離1 個月(31 d)的變化情況Fig.2 Variations in the distance between two satellites with different initial orbital parameters within one month(31 days)
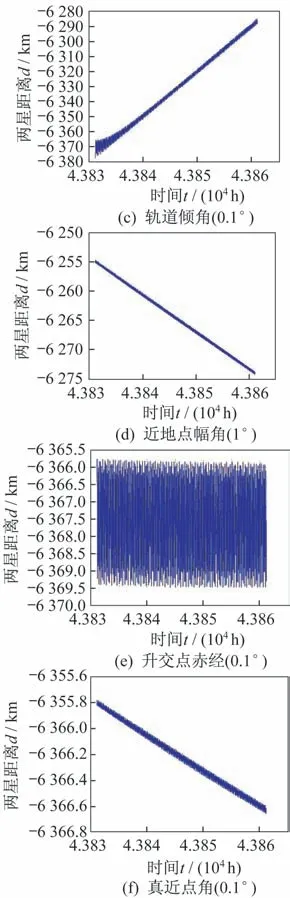
續(xù)圖2 某一初始軌道參數(shù)不同的兩顆衛(wèi)星間距離1 個月(31 d)的變化情況Continued fig.2 Variations in the distance between two satellites with different initial orbital parameters within one month(31 days)
圖中可見,不同軌道參數(shù)對于兩星相對位置變化關系的影響不同。近地點幅角和真近點角,即相位不同的2 顆星,距離的周期性變化及累計變化相對緩慢;升交點赤經(jīng)不同的兩顆星,相對距離的周期性變化較大,累計變化相對緩慢;半長軸、偏心率、軌道傾角不同的2 顆星,相對距離的周期性變化及累計變化均較大,見表3。
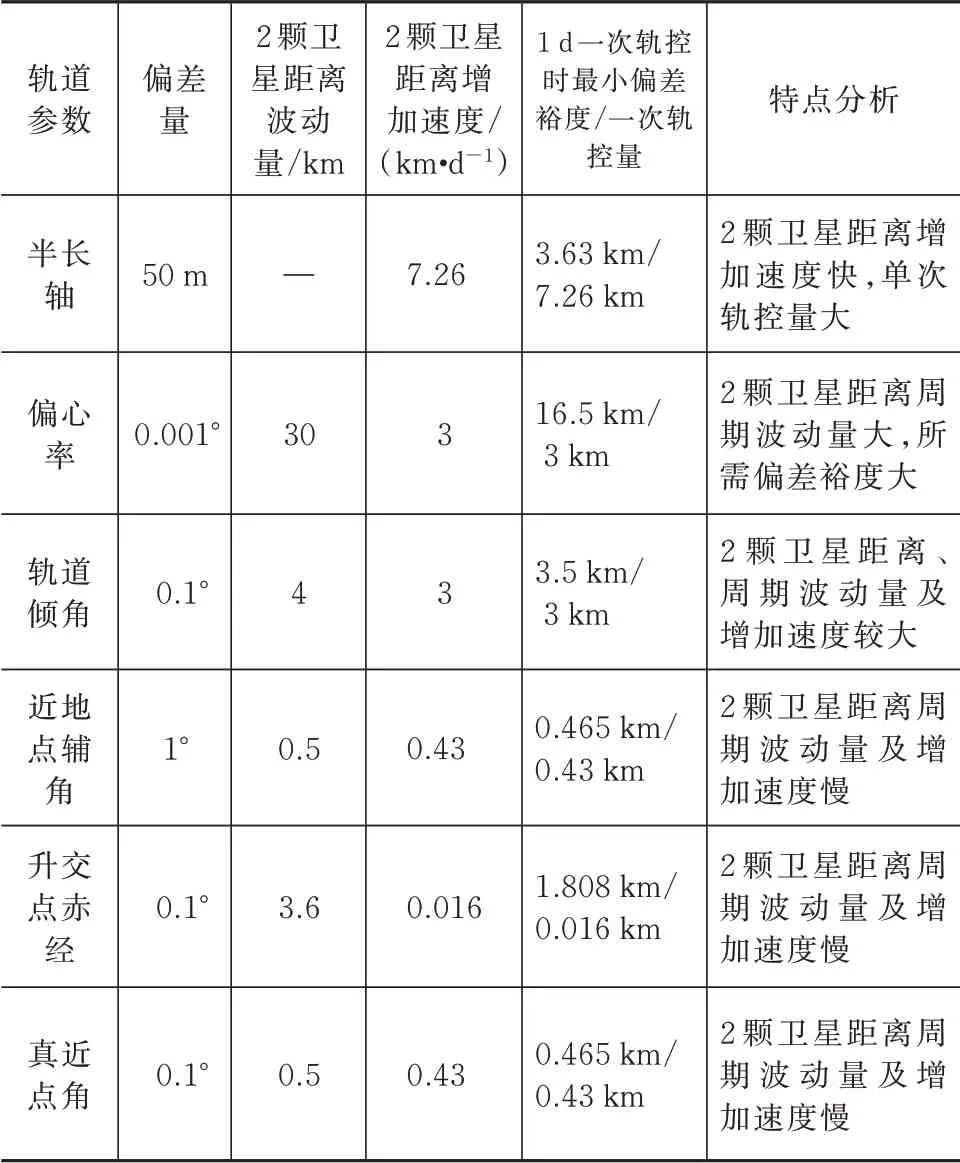
表3 不同軌道參數(shù)偏差對兩星位置變化關系的影響Tab.3 Effects of different orbit parameter deviations on the position change of two satellites
因此,為了構(gòu)型維持簡單,一般選用設計不同相位或升交點赤經(jīng)的方式設計星座構(gòu)型。設兩星標稱距離為R,輔星位置偏差裕度為ε,建立輔星虛擬星,輔星實際在以虛擬星為中心、半徑為ε的圓內(nèi)運動。若軌控周期為T,2 顆衛(wèi)星間距的波動量Δd和2 顆衛(wèi)星間距增加速度V的關系,如圖3 所示。

圖3 偏差裕度分析Fig.3 Analysis of the deviation margin
輔星相對于主星的運動包括周期性位置波動和長時間位置變化積累,在以T為周期控制的約束下,周期性波動和長時間累積位置偏差必須在偏差裕度范圍內(nèi),因此,其偏差裕度必須滿足如下關系:

以上單獨考慮了2 顆衛(wèi)星間的相對距離的變化關系,并未考慮2 顆衛(wèi)星的相對方位角的變化關系,實際上2 顆星的相當方位角也是按不同規(guī)律變化的。因此,輔星必存在于以主星為中心、主星與輔星虛擬星距離為半徑、偏差裕度的2 倍為厚度的球形殼體內(nèi)。根據(jù)單一軌道參數(shù)偏差,設計星群構(gòu)型,其星群切面如圖4 所示。其中,主星偏差裕度為εmain,輔星偏差裕度為ε。

圖4 星群系統(tǒng)構(gòu)型Fig.4 Configuration of the satellite cluster system
主星與每顆輔星的距離dn的求解公式為

式中:n為整數(shù),表示輔星序號,若該星群布置N顆輔星,則滿足0 <n≤N。
該星群拓撲構(gòu)型的優(yōu)點:只需周期性控制每顆輔星相對于虛擬星位置即可,無需再考慮任意兩星的碰撞問題,當軌控裕度一定時,則軌控周期確定。
星群系統(tǒng)構(gòu)型的設計步驟如下:
步驟1通過星群系統(tǒng)有界要求及偏差裕度要求,求得主星周圍最多可布置的輔星數(shù)目;
步驟2根據(jù)任務要求確定實際發(fā)射輔星數(shù);
步驟3求得每顆輔星虛擬星到主星的初始軌道根數(shù)偏差,即得到實際主、輔星分層結(jié)構(gòu);
步驟4通過各輔星虛擬星與主星的初始軌道參數(shù)偏差計算得到每顆輔星的軌道控制周期。
3 實例應用
建立軌道高度700 km、軌道傾角45°為主星的星群構(gòu)型,采用LoRa 技術(shù)作為星間通信協(xié)議,有效通信距離為200 km。
不同近地點幅角偏差兩星初始距離、兩星距離波動量、兩星距離增加速度的變化情況,如圖5所示。

圖5 主、輔星初始距離,距離波動量,距離增加速度隨近地點幅角初始偏差的變化曲線Fig.5 Variations of the initial distance,the fluctuation quantity,and the distance increase velocity between the principal and auxiliary satellites with the initial deviation of the argument of perigee
隨著初始近地點幅角偏差的增大,主星與輔星初始距離線性增大,線性增大系數(shù)k為123.34 km/(°)。通過調(diào)整近地點幅角偏差的初始偏差值來對輔星位置進行布局,離主星越近的球形殼體內(nèi)的輔星,其初始近地點幅角偏差越小,離輔星越遠的球形殼體內(nèi)的輔星,其初始近地點幅角偏差越大(如圖4 所示),必須存在如下關系:

根據(jù)任務要求,通信距離約束為200 km,設主星偏差裕度εmain和輔星的偏差裕度ε均為10 km,按照此方法布局輔星能夠布局的最大數(shù)量為n,則必滿足dn=L?ε,得到最多可布局衛(wèi)星數(shù)為9 顆,即星群系統(tǒng)規(guī)模最大為10 顆,其中,1 顆主星,9 顆輔星。
得到星群布局架構(gòu):主星為中心,9 顆輔星按照初始近地點幅角相對主星依次遞減約0.016 2o進行均勻布局,其中,最里層輔星與主星初始近地點幅角偏差Δγ1=d1/k≈0.162°,最外層輔星與主星初始近地點幅角偏差Δγ9=d9/k≈1.459°。星群系統(tǒng)軌控周期見表4。

表4 所設計星群架構(gòu)的擴散特性及軌控周期要求Tab.4 Diffusion characteristics and orbit control period requirements of the designed cluster architecture
最內(nèi)層(第1 層)輔星軌控周期為1 422 d,最外層(第9 層)軌道控制周期為747 d。衛(wèi)星在軌只需要根據(jù)每顆輔星的軌控周期,定期根據(jù)該輔星與主星的相對位置關系進行軌道維持,以將該輔星控制在相應“殼層”內(nèi)即可。
4 結(jié)束語
本文針對當前衛(wèi)星星群項目規(guī)模的擴大化以及對低功耗、低成本要求的逐步增加,提出了一種基于LoRa 無線通信技術(shù)的星群系統(tǒng)架構(gòu)。根據(jù)LoRa 通信協(xié)議的特點,進一步提出了一種適應于該衛(wèi)星系統(tǒng)架構(gòu)的松散式星群拓撲構(gòu)型。該星群拓撲構(gòu)型克服了當前簡單的串聯(lián)式星群架構(gòu)的設計約束,具有衛(wèi)星相對位置松散多樣、設計方便、后續(xù)構(gòu)型維持簡單等優(yōu)點,且適用于其他通信協(xié)議下無特殊隊形要求的松散式有界星群系統(tǒng),應用范圍廣。本文通過對應用實例的分析,證明了該方法的實際可操作性和簡便性。后續(xù)研究的方向為偏差裕度的最優(yōu)化選取,在特定的有界范圍實現(xiàn)盡可能大的衛(wèi)星容量,以在當前星間通信體制的約束下滿足不斷增大的星群規(guī)模需求。
