超高速磁浮列車運行控制技術展望
2021-07-15 06:48:34陳玉泉
電氣化鐵道 2021年3期
陳玉泉
0 引言
目前,我國高鐵建設已經取得巨大成就,中低速磁浮交通已實現產業化,高速磁浮正在積極推進中,磁浮交通已經成為我國未來軌道交通的發展方向之一。我國于2018年正式啟動超高速磁浮技術發展研究項目,開始探索1 000 km/h以上速度范圍的超高速磁浮交通技術發展路線。本文結合我國超高速磁浮技術發展研究課題,對最高運行速度1 000~1 200 km/h的超高速磁浮列車運行控制關鍵技術進行分析和展望。
1 超高速磁浮交通的特點
課題組通過一系列調查和研究,將高溫超導真空管道方案作為超高速磁浮交通技術發展方向,該方案主要具有以下特點:
(1)超高速磁浮懸浮與導向采用超導永磁釘扎斥力懸浮技術,也可采用閉合線圈電動斥力懸浮技術。列車在運行過程中懸浮于軌道上方,與軌道不產生任何接觸。
(2)超高速磁浮驅動方式可采用空芯長定子單邊或雙邊永磁或超導同步直線電機、鐵心長定子單邊雙邊異步直線電機驅動。
(3)超高速磁浮采用高溫超導真空管道,列車在真空管道中運行。
(4)超高速磁浮列車最高運行速度可達1 000~1 200 km/h。
(5)超高速磁浮列車沒有動力,由地面牽引驅動系統推動列車運行;每個供電分區只能運行一列車。
2 超高速磁浮列車運行控制的需求和構想
2.1 超高速磁浮列車運行控制需求
(1)應遵循故障-安全原則。
(2)應滿足最高運行速度1 000~1 200 km/h的需求。
(3)自動化等級(GOA)不宜低于GOA3級。
(4)應滿足在真空管道內運行的需求。
(5)應按供電分區設置分區控制系統,并實現相鄰分區控制自動無縫切換。
(6)應通過與牽引和懸浮控制系統接口實現列車牽引和制動控制。
(7)應具備可靠的測速定位手段,基于準確的測速定位監控列車安全運行。
(8)應具備冒進防護功能。
(9)應具備進站、出站、折返聯鎖控制功能。
(10)應保證相鄰列車間足夠的安全追蹤間隔。
(11)應具備精確停車功能,并實現車門與站臺門精確對位,保證乘客上下車的安全和舒適。
(12)應具備車-地雙線通信功能。
(13)應具備對列車狀態的實時監測功能。
2.2 列車運行控制系統構想
超高速磁浮列車運行控制與傳統輪軌列車運行控制系統有所不同,主要體現在:(1)列車無動力,牽引和制動均由地面系統完成;(2)列車運行速度為超高速,對車-地通信的傳輸速率和可靠性要求較高;(3)超高速列車的加速和制動距離較長,適合超長的站間距和追蹤間隔;(4)超高速條件下,列車控制應具備更高的安全性、可靠性和自動化程度;(5)列車在真空管道內運行,列車控制系統應考慮軌旁設備的安裝條件以及與管道隔離系統的聯動控制。
基于超高速磁浮的特點,提出以下由傳統列車運行控制系統向列車自主運行控制方向發展的不同思路:將列車運行控制系統的重心放在地面設備上,全面提高地面系統的安全性和可靠性,車載系統主要完成列車完整性檢查和狀態監控,并精簡車載系統與地面系統的信息傳輸。主要理由有:
(1)列車的牽引和制動均由地面系統完成,雖然可以通過車-地通信的方式實現由車載系統向地面系統輸出控制指令實現列車自主運行控制,但是,超高速運行列車的車-地通信信息量增大,對無線通信的可靠性和安全性要求更高,暫時尚無可靠的手段予以保證;盡管未來通信技術發展能夠實現這一目標,但精簡車-地通信信息量能更好地完成車-地信息傳輸。
(2)實現列車自主運行控制其中的一個目的是為了減少地面信號設備尤其是軌旁設備,而超高速磁浮列車是以供電分區作為閉塞分區,且運行時與地面系統未發生物理接觸,以地面系統為控制重心并不代表需要大量增加地面設備,而只是將控制的核心功能由地面設備來完成。
(3)列車懸浮控制、牽引控制和制動控制也是列車運行控制的關鍵,需要對上述控制系統的狀態進行監測,并將相關信息傳送至列車運行控制系統核心設備。若控制核心在列車上,車-地雙向通信數據量將較傳統方式大大增加,對車-地通信的帶寬、速率、時延、誤碼率的要求也會提高,并進一步加大車-地通信功能實現的難度。
超高速磁浮列車運行控制系統可分為中心控制系統、分區控制系統和車載控制系統三部分,如圖1所示。
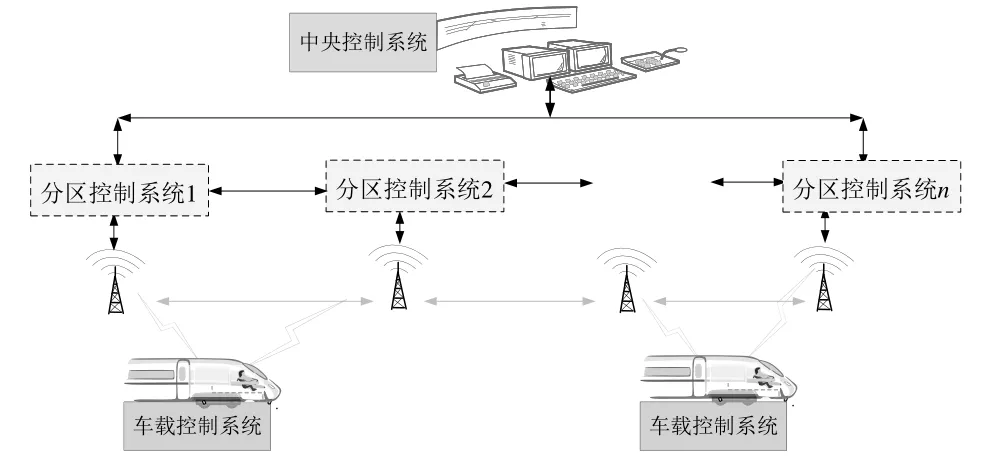
圖1 超高速磁浮列車運行控制系統架構
中央控制系統位于運營控制中心,負責全線超高速磁浮列車自動或人工的運行控制、調度管理與監控。與傳統方式的不同點在于超高速磁浮中央控制系統是一個安全系統,安全等級與分區控制系統、車載控制系統一致,均應采用高可靠、高速運算的計算機平臺,并滿足SIL4級要求。
根據供電分區的設置情況,分區控制系統通過有線骨干網與中央控制系統和相鄰的分區控制系統聯網,接收并執行來自中央控制系統的命令,實現對道岔和牽引制動系統等軌旁執行設備的控制、對本分區內列車進行控制和管理、向中央控制系統和相鄰分區控制系統報告本分區管內設備狀態等。
超高速磁浮列車兩端均設置一套車載控制系統設備,每套車載控制系統設備均能單獨與車-地通信系統聯系,形成相對獨立的雙套熱備系統。車載控制系統負責磁浮列車狀態的信息獲取和控制,向地面分區控制系統報告列車狀態信息,并與分區控制系統配合,共同控制列車安全運行。
3 超高速磁浮列車運行控制關鍵技術分析和展望
3.1 測速定位技術
列車測速定位技術是列車運行控制的關鍵技術之一,列車測速定位的精度和可靠性對列車安全防護至關重要,其將影響列車的運行追蹤間隔和運營效率。
傳統輪軌列車典型的測速定位方式是采用車輪測速傳感器測速,并通過絕對定位技術對其進行校正。在磁浮交通系統中,由于磁浮列車與軌道完全無接觸,不需要設置車輪,因而無法采用車輪測速手段。超高速磁浮列車定位測速應根據磁浮特點和速度等級選擇可行的測速定位技術甚至研究新型的測速定位技術。
3.1.1 已應用并可適應磁浮列車的測速定位技術
目前已應用并可適應磁浮列車的主要測速定位技術有:
(1)基于感應環線的測速定位技術。基于感應環線的測速定位目前在日本名古屋和山梨試驗線應用,通過在軌道上鋪設感應環線,并在車底安裝感應線圈,利用地面感應環線和車上感應線圈之間的電磁感應原理計算列車的相對位移,從而實現列車測速和定位。基于感應環線的測速定位方法可通過冗余設置感應線圈提高可靠性和抗干擾能力,但是軌旁設備較多,并且在道岔區域還需進行特殊處理,工程造價和維護工作量均較高。最關鍵的問題是基于感應環線的測速定位方法能否支持1 000 km/h以上的超高速運行仍存在不確定性。
(2)基于長定子齒槽檢測的測速定位技術。上海磁懸浮示范線應用了基于長定子齒槽檢測的測速和相對定位方法,并采用固定應答器的絕對定位方法進行校正。該方案基于列車采用長定子直線同步電機作為牽引驅動,列車上設置有固定頻率的激勵信號源和諧振電路驅動的感應線圈,當感應線圈在齒槽上方移動時,由于齒槽結構變化會導致磁路發生變化,通過檢測線圈自身的等效電感的周期性變化可計算列車單位時間內位移,從而實現列車的測速定位。基于長定子齒槽檢測的測速定位方法具有分辨力高、可靠性高、抗干擾能力強、造價相對較低等優點;但是只能應用于采用長定子直線電機驅動的磁浮系統,且能否支持1 000 km/h以上超高速運行同樣存在不確定性。
(3)基于計數軌枕的測速定位技術。長沙磁浮快線和北京S1線中低速磁浮系統采用基于計數軌枕的測速定位方案。該方案在車底設置具有固定間距的電渦流接近開關傳感器,對軌道的金屬軌枕進行檢測。當列車以一定的速度行駛時,軌枕觸發接近開關傳感器形成一系列脈沖,通過測定脈沖頻率即可計算出列車速度和相對位移。該方法具有裝置簡單、造價低、維護簡單、抗干擾能力強等優點,但對線路上軌枕安裝間距的精度有較高要求。
(4)基于多普勒雷達的測速定位技術。通過在車底安裝多普勒雷達,向軌道的金屬軌枕發射電磁波,由于列車與軌枕存在相對運動,根據多普勒頻移效應,通過檢測發射波和反射波之間的頻移就可以計算列車的運行速度。該技術方案不需要安裝軌旁設備,造價低,維護簡單,且由于超高速磁浮在真空管道內運行,不易受外部條件影響導致誤差。但該方案對線路上軌枕或軌旁固定設施安裝間距的精度同樣有較高要求,可以進一步研究軌旁具有高安裝精度的設施作為參照物。
(5)基于全球導航衛星系統測速定位技術。基于全球導航衛星系統(Global Navigation Satellite System,GNSS)的定位方法是一種成熟的技術,目前已廣泛應用于航空航天、鐵路、公路等領域。隨著北斗衛星導航系統的建設,我國可以在各領域充分利用純自主的衛星導航系統。北斗衛星導航系統在定位精度上目前可達到2.5 m,且通過設置差分基站可以精確至厘米級;對于超高速的適應性方面也具有明顯優勢;唯一受限的是隧道內的信號覆蓋問題。
(6)SAR-INS組合測速定位技術。由于超高速磁浮時速大于1 000 km,因此也可以從速度等級角度考慮借鑒飛機的測速定位技術。飛機采用SAR-INS組合測速定位技術。合成孔徑雷達(SAR)為主動式微波成像傳感器,可在能見度極低的氣象條件下得到高分辨率雷達圖像、高精度的觀測距離信息和多普勒信息。慣性導航系統(INS)采用陀螺儀和3個互相垂直的加速度計測量速度和位置變化,由于不需要發送和接收信號,自主性和抗干擾能力都非常強。通過SAR技術和INS技術結合,優勢互補,既能提高測速定位的精確度,又能增強抗干擾能力。
3.1.2 引用新技術應用于超高速磁浮測速定位
(1)RFID射頻識別技術實現測速定位。通過在軌旁固定間距處設置RFID射頻電子標簽,列車通過時掃描RFID射頻電子標簽獲取絕對位置信息實現絕對定位,還可以根據列車通過固定間距的時間計算列車速度。為提高測速定位系統的可靠性,可在磁浮軌道兩側冗余設置固定間距的RFID射頻電子標簽,在車載裝置列車上設置2套電子標簽探測器,如圖2所示。該技術的缺點是不能實時測速定位,更適合于絕對定位。

圖2 RFID射頻識別技術測速定位示意圖
(2)采用激光掃描技術實現列車定位。激光掃描技術可以快速、大量地采集空間點位信息,具有快速、無接觸、實時、動態、主動、高密度、高精度、數字化、自動化等特性。掃描速度由最初1 000點/秒發展到目前的120萬點/秒。因此,可通過在列車上設置激光掃描設備,地面設置便于激光掃描設備辨認且不易誤認的設施,按固定間距設置,可實現絕對定位或根據列車通過固定間距的時間計算列車速度,如圖3所示。在地面設置激光掃描設備對列車進行辨認在技術上可行,但是需要設置大量激光掃描儀,工程造價較高,因此只考慮在列車上設置激光掃描儀。
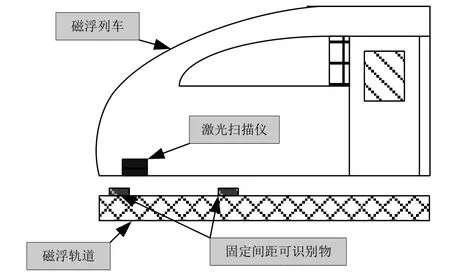
圖3 激光掃描技術測速定位示意圖
為提高測速定位系統的可靠性,可在列車上設置2套激光掃描儀,通過冗余結構實時進行比對,保證測速定位的準確性。如果磁浮軌道設施的尺寸是固定的,也可以直接采用磁浮軌道設施作為識別物,以避免在軌道上安裝其他設施,且更容易實現連續的測速定位功能。
通過對上述測速定位技術的分析和展望,并考慮真空管道和國內長距離運輸橋隧比較高的應用環境,在上述多種測速定位技術中,目前已在中低速和高速磁浮系統應用的技術對超高速磁浮系統的適應性上還有所欠缺,新技術如RFID射頻識別技術和激光掃描技術目前尚未在軌道交通領域得到應用,仍待進一步的研究和實驗室試驗。SARINS組合測速定位技術已有多年的應用經驗,技術相對較為成熟,缺點在于測速定位精度不足,需要加以絕對定位校正。基于全球衛星導航系統測速定位技術具有很好的運用前景,但存在隧道內信號覆蓋問題。
在不具備成熟的超高速磁浮測速定位技術前提下,對不同測速定位方法進行結合,使之優勢互補,顯著提高測速定位的精度和可靠性,將是未來重要的研究方向。例如,在非隧道和地上區段采用衛星定位技術結合SAR-INS組合測速定位技術,在隧道和地下區段采用SAR-INS組合測速定位技術并結合RFID射頻識別技術實現絕對定位校正。
3.2 車-地通信技術
超高速磁浮列車運行控制系統的車-地信息通道涉及行車安全,應滿足超高速運行、高可靠性、低延時、低誤碼率等要求。
超高速磁浮車-地通信技術面臨的最大問題是超高速帶來的多普勒頻移問題和頻繁越區切換問題。目前在軌道交通領域應用成熟的車-地無線通信系統支持的最高速度約為400 km/h,需要根據超高速磁浮運行控制的特定需求及真空管道的材料及結構特點,重點研究對多普勒頻移不敏感的新型調制解調技術和新的越區切換算法,以適應列車超高速移動時無線通信系統能夠穩定可靠工作。
雖然目前還沒有成熟可靠的車-地通信技術能夠滿足超高速磁浮運行控制的需求,但隨著無線通信技術的飛速發展,5G技術已經開始商用,其未來發展可期。當前,部分研究人員也提出采用C-RAN和免切換移動蜂窩技術來滿足超高速磁浮的運行控制需求。
超高速磁浮車-地通信技術的前景是樂觀的,由于超高速磁浮列車運行速度極快,對信息的實時性和誤碼率要求很高,為了增強系統可靠性,可以通過優化列車運行控制系統的架構和功能,簡化車-地通信的信息量,從而提高信息傳輸的可靠性。
3.3 其他配套關鍵技術
列車懸浮、牽引和制動技術在超高速磁浮列車運行控制中同樣起著至關重要的作用。列車運行控制系統不僅需要通過與列車懸浮、牽引和制動控制系統接口實現聯動和控制,列車懸浮、牽引和制動技術還需要具有與超高速磁浮列車運行控制系統相當的可靠性、可用性和安全性,才能保證超高速磁浮列車安全、可靠運行。
4 結語
最高運行速度1 000~1 200 km/h的超高速磁浮系統目前仍處于戰略研究階段,部分研究機構已經逐步開展系統設備的研制,并取得了一些成果,但是,超高速磁浮列車運行控制關鍵技術目前仍缺乏成熟、可靠的技術作為支撐。本文僅對超高速磁浮列車運行控制關鍵技術做出一些展望,未來還有待廣大科研機構共同努力研究,逐步攻克目前存在的瓶頸問題,實現超高速磁浮列車運行控制關鍵技術的突破。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
少先隊活動(2021年4期)2021-07-23 01:46:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16