
SCC12000TM履帶式起重機(jī)機(jī)電液聯(lián)合仿真結(jié)果與分析*
2021-07-14 08:34:28彭繼文廖建國魏玉蘭
機(jī)電工程技術(shù) 2021年4期
關(guān)鍵詞:模型
彭繼文,廖建國,康 濱,王 停,魏玉蘭※
(1.浙江三一裝備有限公司,浙江湖州 313000;2.湖州師范學(xué)院工學(xué)院,浙江湖州 313000)
0 引言
隨著我國基本建設(shè)的規(guī)模越來越大,需要吊運(yùn)的物品質(zhì)量、體積以及起升高度也都隨之增大,履帶起重機(jī)憑借自身的優(yōu)越性,被廣泛地應(yīng)用于港口、風(fēng)力發(fā)電機(jī)、鐵路、核電站、石油化工等大型工程項(xiàng)目中[1]。履帶式起重機(jī)是集機(jī)械、電子、液壓、控制等多個(gè)領(lǐng)域子系統(tǒng)于一體的復(fù)雜系統(tǒng)[2]。為了提高其設(shè)計(jì)效率,縮短設(shè)計(jì)周期,越來越多的研究采用仿真建模的方法,利用建模分析發(fā)現(xiàn)設(shè)計(jì)中的不足,方便進(jìn)一步改進(jìn),以檢驗(yàn)是否達(dá)到預(yù)期設(shè)計(jì)目標(biāo)。王凱等[3]在Ansys中建立了臂架系統(tǒng)的有限元模型,在應(yīng)力分析的基礎(chǔ)上,提出了強(qiáng)度、剛度及穩(wěn)定性評(píng)定方案,從而實(shí)現(xiàn)對(duì)該履帶起重機(jī)臂架的評(píng)定。紀(jì)緒[4]利用AMESim軟件開發(fā)出了履帶起重機(jī)起升系統(tǒng)、行走驅(qū)動(dòng)系統(tǒng)、回轉(zhuǎn)系統(tǒng)等系統(tǒng)的液壓仿真模型。但大部研究在仿真分析時(shí)采用單一的仿真軟件,這很難得到多個(gè)子系統(tǒng)之間的相互作用[5-6]。馬長林等[7]構(gòu)建了基于Simulink環(huán)境的機(jī)電液耦合系統(tǒng)的集成化建模與仿真平臺(tái),研究了軟件間聯(lián)合的組織內(nèi)部協(xié)同仿真方法,并以液壓驅(qū)動(dòng)的大型起豎系統(tǒng)仿真實(shí)例驗(yàn)證了該平臺(tái)的有效性。姜棟等[8]以汽車起重機(jī)變幅系統(tǒng)為例,驗(yàn)證了基于Simulink環(huán)境搭建的機(jī)電液一體化系統(tǒng)仿真平臺(tái)的可行性和有效性。這表明該方法能便捷地將機(jī)械、液壓、控制系統(tǒng)仿真模型有機(jī)集成。但目前還未有針對(duì)履帶起重機(jī)的機(jī)電液聯(lián)合仿真的研究。本文以SCC12000TM履帶式起重機(jī)為例,進(jìn)行移動(dòng)超起配重機(jī)構(gòu)機(jī)電液聯(lián)合仿真,模擬履帶起重機(jī)吊裝風(fēng)機(jī)的全過程工況,包括起臂工況、起升重物工況和變幅工況,并對(duì)仿真結(jié)果進(jìn)行分析,以3種工況下的主拉板力、回轉(zhuǎn)支承載荷及彎矩最大值為指標(biāo),驗(yàn)證超起配重過程平穩(wěn)性。
1 機(jī)電液聯(lián)合仿真模型
1.1 Adams多體動(dòng)力學(xué)模型
Adams具有強(qiáng)大的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)分析功能,其建模仿真的精度和可靠性很高,可方便地建立參數(shù)化的模型并進(jìn)行動(dòng)力學(xué)分析[9-11]。故本文采用Adams軟件建立SCC12000TM整機(jī)多體動(dòng)力學(xué)仿真模型,如圖1所示,該模型包括履帶架、底座、上車、中央配重、后配重、主臂、超起桅桿、主桅桿、超起配重和超起配重?fù)渭堋T撃P涂梢月?lián)合其他軟件進(jìn)行仿真,實(shí)現(xiàn)起臂、起升重物和變幅過程的仿真,并得到各工況下的拉板力。

圖1 Adams多體動(dòng)力學(xué)仿真模型
1.2 AMESim移動(dòng)超起配重機(jī)構(gòu)液壓模型
AMESim軟件提供了豐富的液壓、機(jī)械元件模型庫和液壓元件設(shè)計(jì)庫(HCD),為液壓系統(tǒng)模型的搭建提供了便利[12-13]。根據(jù)液壓原理圖,采用AMESim軟件建立移動(dòng)超起配重機(jī)構(gòu)的液壓系統(tǒng)仿真模型,其中液壓泵、電磁換向閥、油缸和溢流閥采用液壓庫中的標(biāo)準(zhǔn)模型,平衡閥采用液壓元件設(shè)計(jì)庫(HCD庫)進(jìn)行建模,實(shí)現(xiàn)液壓系統(tǒng)的壓力、流量等仿真,將在AMESim生成的液壓系統(tǒng)模型S-Function調(diào)入Simulink中。
1.3 Matlab/Simulink控制模型
在軟件Matlab/Simulink中建立移動(dòng)超起配重離地和移動(dòng)的控制模型,對(duì)Simulink進(jìn)行邏輯控制和控制參數(shù)輸出,控制移動(dòng)超起配重油缸和提升油缸泵比例閥電流。
控制目標(biāo):(1)整機(jī)不傾翻;(2)回轉(zhuǎn)支承等結(jié)構(gòu)安全;(3)拉板力、回轉(zhuǎn)支承壓力及彎矩滿足要求;(4)控制邏輯滿足要求。
1.4 機(jī)電液聯(lián)合仿真模型
各軟件的數(shù)據(jù)交換流程如圖2所示。首先基于Ad?ams構(gòu)建多體動(dòng)力學(xué)仿真模型,AMESim建立移動(dòng)超起配重機(jī)構(gòu)液壓模型,將Adams機(jī)械動(dòng)力學(xué)模型和AMESim液壓模型分別導(dǎo)入至Simulink進(jìn)行數(shù)據(jù)互通,通過軟件之間的數(shù)據(jù)互通,實(shí)現(xiàn)移動(dòng)超起配重機(jī)構(gòu)機(jī)電液聯(lián)合仿真,機(jī)電液聯(lián)合仿真模型如圖3所示。
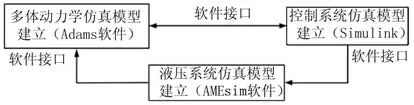
圖2 軟件數(shù)據(jù)交換流程
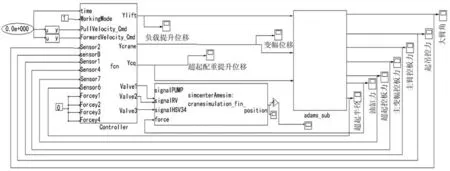
圖3 機(jī)電液聯(lián)合仿真模型
2 整機(jī)多體動(dòng)力學(xué)仿真工況
SCC12000TM主要是針對(duì)風(fēng)電吊裝工況設(shè)計(jì)的履帶起重機(jī),本文利用Adams軟件模擬履帶起重機(jī)吊裝風(fēng)機(jī)的全過程工況,包括起臂工況、起升重物工況和變幅工況。
(1)起臂工況
初始條件:工況HDB60,后配重230 t,中央配重90 t,超起配重100 t,初始超起配重半徑為22 m,超起配重落在地上。
起臂過程:主臂從0°起臂到最大角度85°,超起配重實(shí)現(xiàn)離地,并由22 m移動(dòng)到16 m。
(2)起升重物工況
初始狀態(tài):工作半徑9 m,起升重物300 t,超起配重半徑16 m,超起配重100 t,重物和超起配重均落在地面。
起升重物過程:緩慢起升載荷直至離地10 m,其他機(jī)構(gòu)均未動(dòng)作。
(3)變幅工況
初始狀態(tài):起升重物后,工作半徑由9 m開始變幅。
變幅過程:工作半徑由9 m增大到15.5 m,實(shí)現(xiàn)超起配重離地控制,超起半徑由16 m移動(dòng)到18.7 m。
根據(jù)以上3種工況參數(shù),對(duì)起臂、起升重物和變幅過程進(jìn)行機(jī)電液聯(lián)合仿真。
3 機(jī)電液聯(lián)合仿真結(jié)果
3.1 起臂仿真結(jié)果
起臂過程中的拉板力如圖4所示。圖中,0~40 s時(shí),變幅卷揚(yáng)勻加速轉(zhuǎn)動(dòng),速度由0增大到3.75 r/s;40~120 s時(shí),變幅卷揚(yáng)勻速轉(zhuǎn)動(dòng);120~160 s時(shí),變幅卷揚(yáng)勻減速轉(zhuǎn)動(dòng),速度由3.75 r/s減小到0,臂架起臂到85°夾角。

圖4 起臂過程中各拉板的拉板力
3.2 起升重物和變幅仿真結(jié)果
圖5 所示為起升重物和變幅過程中各拉板的拉板力。圖中可以看出,0~2 s時(shí)重物不動(dòng),2~5 s超起配重,5~10 s起升重物,10~80 s變幅,主變幅拉板的拉板力在62 s達(dá)到約800 kN。超起配置由最初位置16.0 m,開始向后移動(dòng),到80 s時(shí),移動(dòng)到18.7 m。
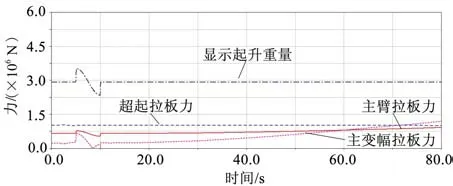
圖5 提升重物和變幅過程中各拉板的拉板力
圖6 ~7所示為回轉(zhuǎn)支承所受壓力及彎矩變化曲線示意圖,由圖可知其所承受壓力及彎矩都在允許范圍內(nèi)。
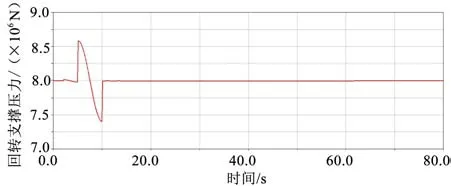
圖6 回轉(zhuǎn)支撐壓力
3.3 仿真結(jié)果
在起臂、起升重物和變幅過程中,各工況下的拉板力最大值如表1所示,回轉(zhuǎn)支承壓力及彎矩最大值如表2所示。

圖7 回轉(zhuǎn)支撐彎矩
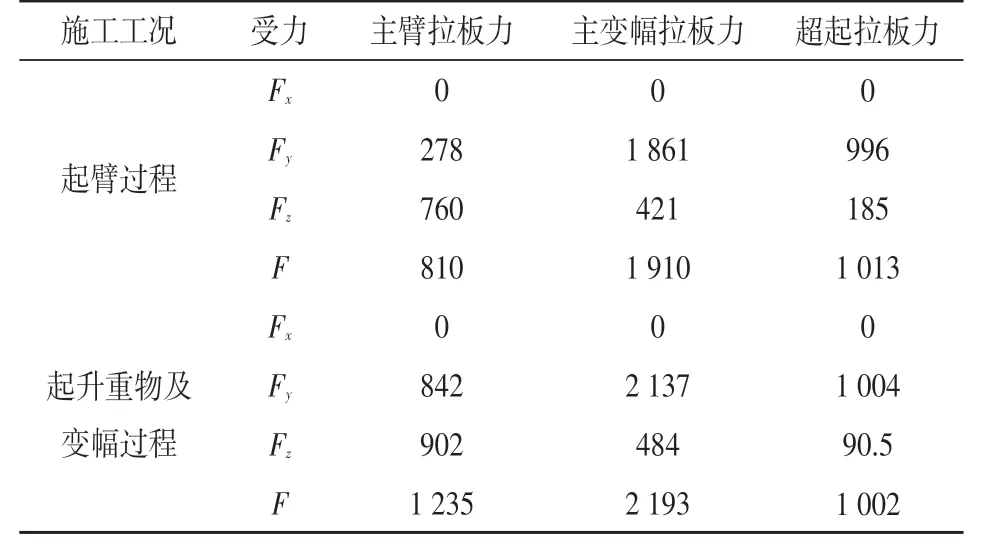
表1 各工況下的拉板力最大值 kN
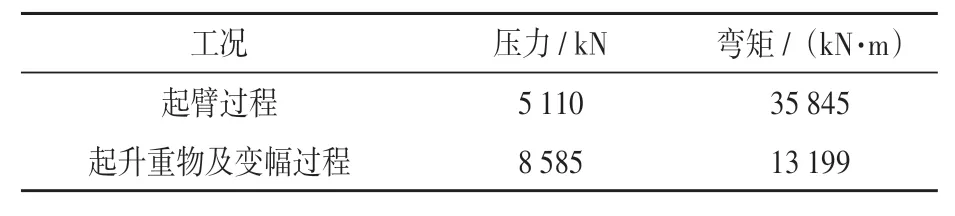
表2 回轉(zhuǎn)支承壓力及彎矩最大值
仿真結(jié)果表明,在起臂、起升重物和變幅過程中拉板力仿真結(jié)果與理論吻合,最大值滿足總體設(shè)計(jì)要求。機(jī)電液聯(lián)合仿真驗(yàn)證了控制邏輯和控制參數(shù)設(shè)計(jì)合理,超起配重離地和移動(dòng)過程較平穩(wěn),主拉板力、回轉(zhuǎn)支承載荷及彎矩最大值均滿足要求,驗(yàn)證了超起配重過程平穩(wěn)性。
4 結(jié)束語
本文以SCC1200TM履帶式起重機(jī)為研究對(duì)象,基于Adams實(shí)現(xiàn)了SCC12000TM的整機(jī)多體動(dòng)力學(xué)仿真,聯(lián)合AMESim與Simulink之間的數(shù)據(jù)交互實(shí)現(xiàn)移動(dòng)超起配重機(jī)構(gòu)機(jī)電液聯(lián)合仿真,分別對(duì)起臂、起升重物和變幅3種工況進(jìn)行機(jī)電液聯(lián)合仿真,得到了各工況下的拉板力、回轉(zhuǎn)支承載荷及彎矩最大值。仿真結(jié)果表明,超起配重過程平穩(wěn),拉板力、回轉(zhuǎn)支承載荷及彎矩最大值均滿足總體設(shè)計(jì)要求。由此可以看出,本文所提出的基于Adams、AMESim與Simulink的機(jī)電液聯(lián)合仿真方案是可行的,該方案還可為履帶式起重機(jī)整機(jī)總體設(shè)計(jì)和有限元分析提供荷載。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
