基于道路照明燈罩機(jī)械臂式末端清洗系統(tǒng)研究
2021-07-12 00:47:44錢(qián)亞偉
現(xiàn)代機(jī)械 2021年3期
錢(qián)亞偉
(長(zhǎng)安大學(xué)工程機(jī)械學(xué)院,陜西 西安 710064)
0 引言
隨著路燈數(shù)量的快速增加,由于汽車(chē)尾氣和霧霾天氣等影響,大量路燈燈罩被污染物附著,影響照明效果。目前,對(duì)路燈燈罩的清洗作業(yè)主要依托高空作業(yè)平臺(tái)載人進(jìn)行清洗,效率低下且存在安全隱患[1]。在路燈燈罩清潔系統(tǒng)研究中,宋淑敏[2]提出了一種基于旋轉(zhuǎn)式LED路燈清洗裝置,通過(guò)舉升托盤(pán)至接近路燈時(shí),下拉拉環(huán)使托盤(pán)套在燈罩上進(jìn)行清洗,并通過(guò)萬(wàn)向輪移動(dòng)微調(diào)。該裝置穩(wěn)定性差,清洗效率低。Akifumi Shintaku[3]開(kāi)發(fā)了使用空化噴射技術(shù)的高速隧道照明設(shè)備清潔車(chē),并使用先進(jìn)的駕駛員輔助系統(tǒng)提高安全性,但不能廣泛適用于路燈清洗作業(yè)。本文設(shè)計(jì)了一種安裝在高空舉升平臺(tái)上的機(jī)械臂式路燈燈罩末端清洗系統(tǒng),可實(shí)現(xiàn)自動(dòng)化清洗,并提高清潔效率。
1 末端清洗系統(tǒng)模型建立
1.1 結(jié)構(gòu)設(shè)計(jì)
本文設(shè)計(jì)的搭載于高空舉升平臺(tái)上的機(jī)械臂式燈罩末端清洗裝置如圖1所示,末端清洗裝置主要由刷盤(pán)、電機(jī)、電機(jī)支座、四桿變幅機(jī)構(gòu)、連桿、閥控液壓缸和轉(zhuǎn)臺(tái)等組成。機(jī)械臂式末端清洗裝置共有三自由度,轉(zhuǎn)臺(tái)回轉(zhuǎn),連桿變幅和四桿變幅機(jī)構(gòu)角度調(diào)節(jié)。
以圖1中路燈末端清洗機(jī)構(gòu)為研究對(duì)象,通過(guò)機(jī)器人運(yùn)動(dòng)學(xué)方法分析臂架運(yùn)動(dòng)關(guān)系,采用改進(jìn)D-H參數(shù)法求解,并建立路燈燈罩末端清洗裝置D-H坐標(biāo)系如圖2。
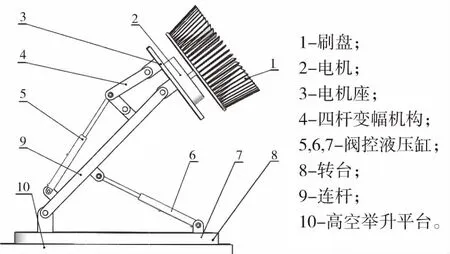
圖1 燈罩末端清洗機(jī)構(gòu)三維結(jié)構(gòu)圖
在燈罩末端清洗機(jī)構(gòu)參數(shù)中各變幅機(jī)構(gòu)旋轉(zhuǎn)角度θi為變量,根據(jù)圖2建立機(jī)械臂連桿參數(shù)表如表1。
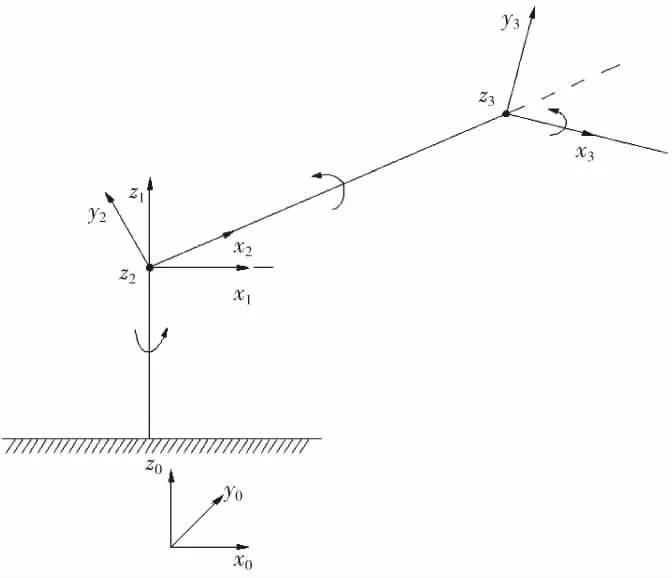
圖2 燈罩末端清洗機(jī)構(gòu)D-H坐標(biāo)系
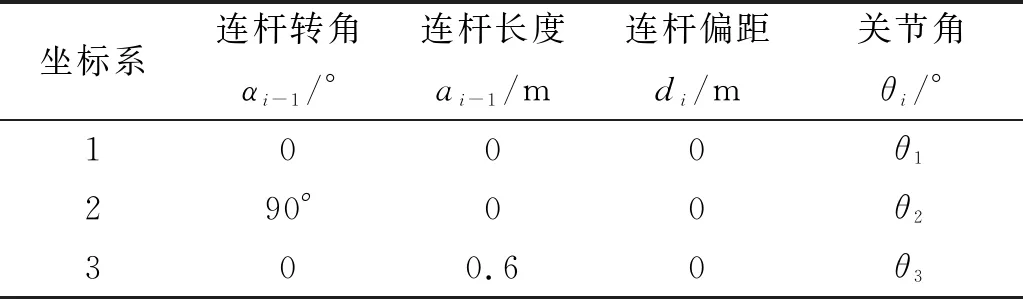
表1 燈罩末端清洗機(jī)構(gòu)連桿參數(shù)表
參數(shù)表定義如下:
3)紋理共享。紋理數(shù)據(jù)占模型存儲(chǔ)空間的絕大部分,并且也很大程度影響場(chǎng)景的顯示性能。在數(shù)字城市海量模型中,大量使用了重復(fù)的紋理數(shù)據(jù),紋理共享避免了反復(fù)加載相同紋理的數(shù)據(jù),減少了內(nèi)存使用量,并提升了渲染壓力。
首先,父母應(yīng)重視家庭教育對(duì)個(gè)體健康人格培養(yǎng)的作用。家庭環(huán)境的質(zhì)量通常被認(rèn)為是決定青少年行為的重要因素。弗洛伊德特別強(qiáng)調(diào),一個(gè)人的性格是由幼年的經(jīng)驗(yàn)所決定的,精神分析學(xué)派認(rèn)為家庭教育對(duì)人格的影響是潛移默化的,許多學(xué)生的問(wèn)題,主要來(lái)自于他所身處的原生家庭,更確切地說(shuō),是家庭的問(wèn)題引發(fā)了學(xué)生的心理或行為障礙。
αi—繞Xi軸,從Zi旋轉(zhuǎn)到Zi+1的角度,即連桿轉(zhuǎn)角;
pz=a2sθ2
θi—繞Zi軸,從Xi-1旋轉(zhuǎn)到Xi的角度,即關(guān)節(jié)角。
1.2 工作原理
清洗裝置的轉(zhuǎn)臺(tái)安裝在高空作業(yè)車(chē)舉升平臺(tái)支座上,當(dāng)舉升平臺(tái)舉升至燈罩下方時(shí),停止舉升并固定。轉(zhuǎn)臺(tái)內(nèi)的液壓缸調(diào)節(jié)角度使刷盤(pán)在燈罩正下方;鉸接在轉(zhuǎn)臺(tái)上的液壓缸控制連桿變幅和刷盤(pán)與燈罩間接觸壓力,并通過(guò)鉸接在連桿上的液壓缸控制四桿變幅機(jī)構(gòu)進(jìn)行刷盤(pán)的姿態(tài)調(diào)節(jié)。路燈燈罩的位置參數(shù)已通過(guò)傳感器測(cè)得作為主控制器輸入,通過(guò)正逆運(yùn)動(dòng)學(xué)求解轉(zhuǎn)臺(tái)、連桿以及四桿機(jī)構(gòu)的變幅角度,并通過(guò)電液比例閥控制液壓缸伸縮進(jìn)行角度調(diào)節(jié)和接觸壓力控制,盤(pán)刷角度和接觸壓力由傾角和壓力傳感器檢測(cè)作為反饋信號(hào)。當(dāng)刷盤(pán)和燈罩對(duì)準(zhǔn)且清洗壓力達(dá)到要求后,啟動(dòng)電機(jī)進(jìn)行清洗作業(yè)。連桿和四桿變幅機(jī)構(gòu)變幅角度為0~45°。燈罩清洗流程圖如圖3。
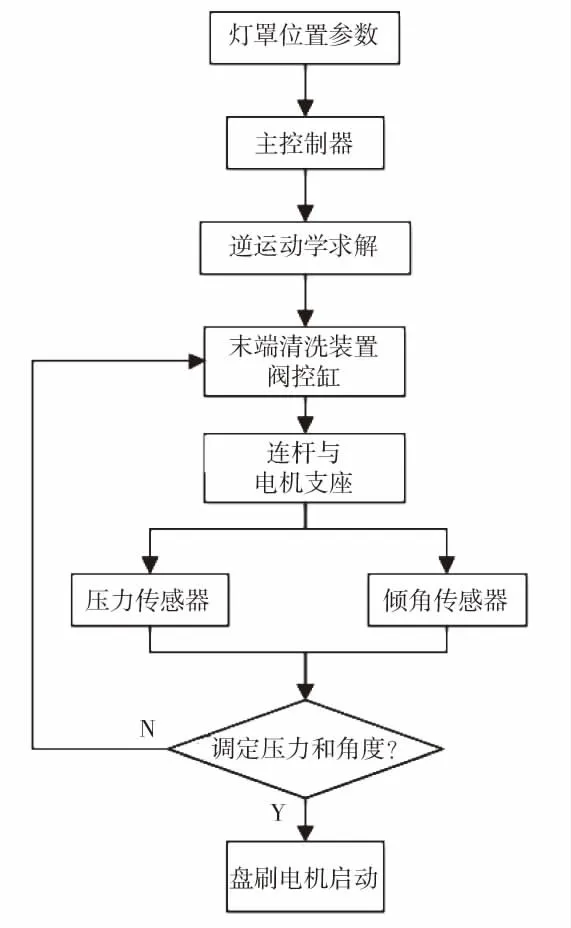
圖3 燈罩清洗流程圖
2 機(jī)械臂式清洗系統(tǒng)運(yùn)動(dòng)學(xué)分析
根據(jù)建立的機(jī)械臂式清洗系統(tǒng)D-H坐標(biāo)系和連桿參數(shù)表,對(duì)各轉(zhuǎn)動(dòng)關(guān)節(jié)進(jìn)行正逆運(yùn)動(dòng)學(xué)求解。
2.1 正運(yùn)動(dòng)學(xué)求解
對(duì)機(jī)械臂式末端清洗機(jī)構(gòu)刷盤(pán)位姿的求解即機(jī)械臂的運(yùn)動(dòng)學(xué)正解。由表1燈罩末端清洗機(jī)構(gòu)連桿參數(shù)表,通過(guò)計(jì)算得到相鄰坐標(biāo)系間變換公式[4]。
施工圖是市政建設(shè)施工的關(guān)鍵,包含的內(nèi)容比較多,比如施工質(zhì)量、施工成本投入、工程量、施工進(jìn)度等,市政工程施工方案制定要采取公開(kāi)招標(biāo)形式,然后在所有的圖紙中進(jìn)行篩選,選出幾個(gè)較為滿(mǎn)意的圖紙,召開(kāi)施工圖審核大會(huì),邀請(qǐng)專(zhuān)家、工程師、圖紙?jiān)O(shè)計(jì)者參與,在大會(huì)上設(shè)計(jì)人員要進(jìn)行技術(shù)交底,相關(guān)人員討論施工圖的可行性,同時(shí)還要綜合考慮施工進(jìn)度、施工技術(shù)難度、施工成本等,然后選擇性?xún)r(jià)比最高的設(shè)計(jì)圖紙。另外,為了確保施工圖萬(wàn)無(wú)一失,要將圖紙交給專(zhuān)業(yè)機(jī)構(gòu)進(jìn)行審核,確保圖紙中沒(méi)有任何錯(cuò)誤,避免實(shí)際施工中頻繁出現(xiàn)圖紙更改,從而引發(fā)市政建設(shè)質(zhì)量問(wèn)題。
機(jī)械臂運(yùn)動(dòng)學(xué)變換矩陣為:
(5)
電液比例換向閥傳遞函數(shù):
r11=cθ1(cθ2cθ3-sθ2sθ3)
r12=-cθ1(cθ2sθ3+sθ2cθ3)
r13=sθ1
r21=sθ1(cθ2cθ3-sθ2sθ3)
隨著物聯(lián)網(wǎng)技術(shù)的推廣以及智能電網(wǎng)概念的興起,國(guó)內(nèi)外都在智能用電建設(shè)方面開(kāi)展了大量的理論研究與實(shí)際探索,并逐漸對(duì)智能電網(wǎng)概念在用電側(cè)體現(xiàn)出的特征內(nèi)涵和典型建設(shè)內(nèi)容形成了共識(shí);同時(shí),國(guó)務(wù)院“三網(wǎng)融合”的開(kāi)展對(duì)于促進(jìn)信息和文化產(chǎn)業(yè)發(fā)展,提高國(guó)民經(jīng)濟(jì)和社會(huì)信息化水平,滿(mǎn)足人民群眾日益多樣的生產(chǎn)、生活服務(wù)需求,拉動(dòng)國(guó)內(nèi)消費(fèi),形成新的經(jīng)濟(jì)增長(zhǎng)點(diǎn),因此智能小區(qū)的建設(shè)具有重要意義。
隨著中國(guó)經(jīng)濟(jì)與社會(huì)的高速發(fā)展,用電客戶(hù)對(duì)供電可靠性的要求不斷提高,大規(guī)模開(kāi)展10 kV配電網(wǎng)不停電作業(yè)已成為供電公司實(shí)現(xiàn)客戶(hù)“用好電、不停電”目標(biāo)不可或缺的手段之一。配電網(wǎng)不停電作業(yè)主要采用絕緣桿作業(yè)法、絕緣手套作業(yè)法兩種方式[1]。
r22=-sθ1(cθ2sθ3+sθ2sθ3)
工程管理效益的提高不僅在工程規(guī)范施工方面,同時(shí)對(duì)工程的合理化分配也起到一定的輔助作用,從而達(dá)到控制工程施工成本目的。現(xiàn)代工程建設(shè)對(duì)于建筑施工功能性要求較高,施工項(xiàng)目種類(lèi)繁復(fù),對(duì)施工流程的控制極為重要,是解決工程施工材料及資源浪費(fèi)問(wèn)題的重要根據(jù)。BIM技術(shù)應(yīng)用能夠根據(jù)現(xiàn)有的施工條件對(duì)相關(guān)的施工內(nèi)容進(jìn)行準(zhǔn)確判斷,并合理的規(guī)劃施工流程,以工程成本節(jié)約為基礎(chǔ),選用時(shí)間最短、效率更高及質(zhì)量更好的施工管理方案,從而在多個(gè)方面對(duì)工程施工的質(zhì)量與成本問(wèn)題進(jìn)行解決。
r23=-cθ1
r31=sθ2cθ3+cθ2sθ3
r32=-sθ2sθ3+cθ2cθ3
r33=0
采用全收糞法。試驗(yàn)選用60只成年公雞,隨機(jī)分成5組,每個(gè)處理組6個(gè)重復(fù),每個(gè)重復(fù)2只雞。其中一組為內(nèi)源組,其他4組分別為正對(duì)照組、負(fù)對(duì)照組、復(fù)合酶A組、復(fù)合酶B組。用試驗(yàn)飼糧預(yù)飼3 d,然后連續(xù)收集4 d糞樣。糞樣收集后按每100 g鮮樣加10%硫酸5 ml、滴加5滴甲苯防腐,混勻并置于-20℃冰柜中保存,用于干物質(zhì)代謝率、能量代謝率和粗蛋白質(zhì)代謝率測(cè)定。
二是在資金績(jī)效評(píng)價(jià)環(huán)節(jié),制定了《贛州市財(cái)政專(zhuān)項(xiàng)扶貧資金績(jī)效考評(píng)辦法》,圍繞資金規(guī)范管理、脫貧成效等方面,對(duì)統(tǒng)籌整合資金使用績(jī)效進(jìn)行評(píng)價(jià)監(jiān)督。2017年,贛州委托第三方機(jī)構(gòu)對(duì)8個(gè)扶貧開(kāi)發(fā)重點(diǎn)縣的統(tǒng)籌整合財(cái)政涉農(nóng)扶貧資金實(shí)施了績(jī)效評(píng)價(jià),并將評(píng)價(jià)結(jié)果作為市財(cái)政分配扶貧專(zhuān)項(xiàng)資金的重要依據(jù)。
聯(lián)立公式(5)、(6),令兩邊對(duì)應(yīng)矩陣元素相等,計(jì)算求得各轉(zhuǎn)動(dòng)關(guān)節(jié)角度θi:
py=a2sθ1cθ2
di—沿Zi軸,從Xi-1移動(dòng)到Xi的距離,即連桿偏距;
2.2 逆運(yùn)動(dòng)學(xué)求解
(6)
px=a2cθ1cθ2
θ2=arcsin2(pz,a2)
老師在家長(zhǎng)群中擁有更多的權(quán)力,所以老師一發(fā)言,總有家長(zhǎng)附和,甚至有一些所謂的“戲精”家長(zhǎng)會(huì)在群里賣(mài)力地表演。在微信群的場(chǎng)域之中,時(shí)刻展開(kāi)著身份、地位和話(huà)語(yǔ)權(quán)的博弈與角逐,與現(xiàn)實(shí)生活的場(chǎng)景相似。所不同的是,微信群里并沒(méi)有一套明晰、嚴(yán)格的秩序與規(guī)則,所以不確定因素以及顯得不那么靠譜的事兒也更多。
θ1=arctan2(py,px)

ai—沿Xi軸,從Zi移動(dòng)到Zi+1的距離,即連桿長(zhǎng)度;
3 電液控制系統(tǒng)仿真分析
當(dāng)機(jī)械臂按計(jì)算角度變幅后,刷盤(pán)與路燈燈罩接觸,接觸壓力由鉸接在轉(zhuǎn)臺(tái)上的液壓缸產(chǎn)生,并通過(guò)電機(jī)支座上的壓力傳感器反饋到控制器與設(shè)定接觸壓力進(jìn)行比較并作為反饋信號(hào)對(duì)系統(tǒng)輸入進(jìn)行控制。
由于對(duì)任意i=1,2,...,10,j=1,2,3,4,y=1,有因此,令c=c+1,進(jìn)一步計(jì)算與SD(DEy(0)D(0))(y=1,2,...,10)。經(jīng)過(guò)288次迭代后,計(jì)算結(jié)果表9所示。
3.1 仿真模型
電液比例控制系統(tǒng)主要有放大器、電液比例換向閥、液壓缸、四桿變幅機(jī)構(gòu)以及壓力和傾角傳感器等組成。
其中,
(7)
式中,Ksc—比例閥流量增益;ωs—比例閥固有頻率;ξs—比例閥阻尼比。
閥控缸活塞對(duì)閥芯位移的傳遞函數(shù)[5]:
(8)
式中,Kq—流量增益;Ap—負(fù)載流量等效面積;ωh—液壓固有頻率;ξh—液壓阻尼比。
系統(tǒng)的開(kāi)環(huán)傳遞函數(shù)為:
學(xué)生在實(shí)驗(yàn)時(shí)配置6種質(zhì)量分?jǐn)?shù)的殺蟲(chóng)劑溶液:1.25%、2.5%、5%、10%、20%、40%。學(xué)生在實(shí)驗(yàn)時(shí)配置4種質(zhì)量分?jǐn)?shù)的洗滌劑溶液:2.5%、5%、10%、20%。
(9)
式中,K—開(kāi)環(huán)增益,K=KaKfKscKq/Ap。
對(duì)機(jī)械臂式路燈燈罩末端清洗機(jī)構(gòu)建立MATLAB/Simulink仿真模型,如圖4所示。仿真模型對(duì)應(yīng)參數(shù)取表2中數(shù)據(jù)。
傳統(tǒng)的節(jié)日和節(jié)俗歷史悠久,源遠(yuǎn)流長(zhǎng),集中體現(xiàn)了中華傳統(tǒng)文化的核心價(jià)值,生動(dòng)展示了中國(guó)人豐富多彩的精神世界,是民族特色和民族個(gè)性的具體反映。 同時(shí),它們與民眾生活密切相連,深具活力和影響力,是活態(tài)的傳統(tǒng)文化表現(xiàn)形式,并在世代傳承中起到加強(qiáng)血緣和社會(huì)紐帶、促進(jìn)團(tuán)結(jié)與文化認(rèn)同的作用。 它們記錄著中華民族數(shù)千年的歷史,凝聚了民眾的生活和情感,以全民參與的方式傳承文化血脈、提振民族精神、強(qiáng)化歷史記憶,具有深刻的意義和深遠(yuǎn)的影響。 絢麗多彩的節(jié)日,是我國(guó)人民代代傳承的珍貴文化,也是世界文明的瑰寶。 它們照亮了五千年的歷史,也照耀著未來(lái)的天空。
表2 系統(tǒng)參數(shù)
圖4 燈罩末端清洗系統(tǒng)仿真模型
3.2 仿真結(jié)果分析
建立燈罩末端清洗系統(tǒng)仿真模型后,采用PID控制器對(duì)Simulink仿真模型進(jìn)行分析[6]。轉(zhuǎn)臺(tái)液壓缸7將機(jī)械臂架調(diào)整到與燈罩同一平面內(nèi),液壓缸6控制連桿舉升和接觸壓力控制,液壓缸5控制四桿變幅機(jī)構(gòu)完成刷盤(pán)姿態(tài)調(diào)節(jié)。液壓缸6控制接觸壓力,為提高末端清洗系統(tǒng)的動(dòng)態(tài)品質(zhì),對(duì)比不同增益下系統(tǒng)性能,單位階躍響應(yīng)下,仿真結(jié)果如圖5所示。在單位階躍信號(hào)輸入下,通過(guò)調(diào)整控制轉(zhuǎn)臺(tái)、連桿和四桿變幅機(jī)構(gòu)的閥控缸PID控制器的Kp、Ki、Kd參數(shù),對(duì)末端清洗系統(tǒng)整體動(dòng)態(tài)特性進(jìn)行分析,仿真結(jié)果如圖6所示。
圖5 液壓缸6不同增益下單位階躍響應(yīng)
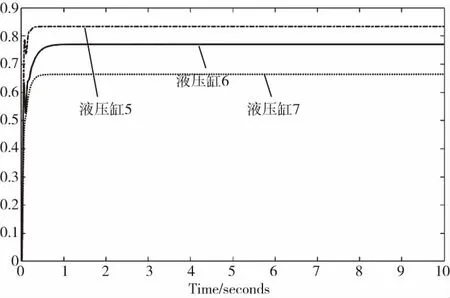
圖6 PID控制下單位階躍響應(yīng)
仿真結(jié)果表明,在單位階躍信號(hào)下,液壓缸6取不同增益值,K值越大,穩(wěn)定性越差,振蕩越明顯,為提高系統(tǒng)穩(wěn)定性和動(dòng)態(tài)響應(yīng)性能,K值取相對(duì)較小值,K=29時(shí),液壓缸6使刷盤(pán)對(duì)燈罩表面的接觸壓力響應(yīng)速度較快。采用PID控制算法,系統(tǒng)中3個(gè)液壓缸在0~1 s時(shí)恢復(fù)穩(wěn)定,超調(diào)量小,保證液壓缸穩(wěn)定完成連桿變幅,驗(yàn)證了姿態(tài)調(diào)節(jié)和刷盤(pán)對(duì)燈罩壓力控制的合理性。
4 結(jié)論
1)本文設(shè)計(jì)一種路燈燈罩末端機(jī)械臂式清洗機(jī)構(gòu),并通過(guò)運(yùn)動(dòng)學(xué)正逆求解,計(jì)算轉(zhuǎn)臺(tái)、連桿以及四桿機(jī)構(gòu)變幅角度,并驗(yàn)證姿態(tài)調(diào)節(jié)與壓力控制的合理性。
2)采用3個(gè)閥控液壓缸和連桿機(jī)構(gòu)進(jìn)行機(jī)械臂式清洗裝置姿態(tài)調(diào)節(jié)與壓力控制,并建立MATLAB/Simulink仿真模型。采用PID控制算法,抑制超調(diào)量,提高了姿態(tài)調(diào)節(jié)與接觸壓力控制的響應(yīng)速度和穩(wěn)定性。
猜你喜歡
建材發(fā)展導(dǎo)向(2022年10期)2022-07-28 03:04:36
建材發(fā)展導(dǎo)向(2021年18期)2021-11-05 09:19:50
建材發(fā)展導(dǎo)向(2021年9期)2021-07-16 07:11:36
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(bào)(2019年40期)2019-09-10 07:22:44
小溪流(畫(huà)刊)(2017年12期)2018-01-10 16:07:29
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
中國(guó)房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
