一種軟體仿金槍魚機器人方案設計及分析
2021-07-12 00:47:42趙冬生李延斌趙文川
現代機械 2021年3期
關鍵詞:結構
趙冬生,張 禹,李延斌,趙文川,王 寧
(沈陽工業大學機械工程學院,遼寧 沈陽 110870)
0 引言
近年來,隨著仿生學和軟體材料的發展,科學家借鑒自然界中魚類的運動原理,利用硅橡膠材料的超彈性特征,在軟體驅動器設計中涌現了不同驅動方式的仿生機器人。由于軟體機器人本身用硅橡膠材料制成,具有高度多變能力和無限自由度[1]。與傳統剛性仿生機器魚相比,軟體機器人結構更加多變,且制造成本低,控制方法簡單可靠,軟體仿生魚類機器人無論在外形還是游動方式上與自然界的魚類完全相同,對海洋生態的影響很小[2]。
目前主流軟體仿生機器人有英國埃塞克斯大學(University of Essex)的Liu等人研制了MT系列和G系列的軟體仿生魚類機器人,G系列軟體仿生魚類實現了峰值轉速130度每秒,平均轉速70度每秒的較好轉向性能[3]。MIT的Marchese等人研制了一款采用流體高彈性驅動器(fluidic elastomer actuators,FEAs)的軟體仿生魚機器人,該機器魚在S形起動實際的實驗中,展現了軟體魚較高的機動性能[4]。國內中科院自動化所在對魚類深入觀察的基礎上,開發了多種軟體仿生魚類機器人[5]。
本文借鑒自然界“游泳冠軍”金槍魚高效運動特點,設計了一種以氣動驅動的軟體仿金槍魚機器人。根據尾部氣腔內的氣體壓力變化而使尾部產生不同程度的變形,以改變頻率和彎曲角度,來實現多種游動模式。
1 金槍魚推進方式分析
1.1 金槍魚推進模式分析
金槍魚模式游動魚類前2/3身體部分基本是不產生推進動力,且后身體部分的擺動也有限,在尾柄處達到最大幅度,如圖1所示。細小的尾柄帶動尾鰭一起運動,尾鰭提供了90%以上的游動推力[6]。因此,如今很多有關研究關注金槍魚模式,許多仿魚類水下推進裝置也采用金槍魚模式魚類的外形[7]。
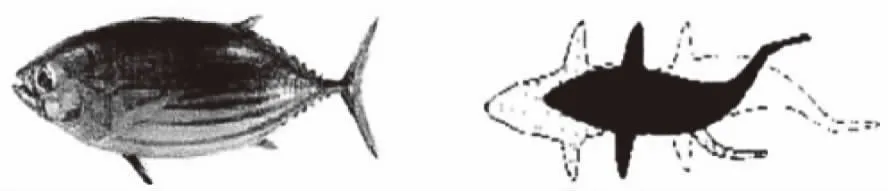
圖1 金槍魚推進模式
1.2 金槍魚尾鰭推進機理分析
在T=0 s時刻,尾鰭沒有運動,兩側無水流還沒有產生波動;在T=0.01 s時,尾部肌肉帶動尾鰭開始擺動,在該時刻尾鰭向逆時針擺動擊打水流,尾鰭上面水壓變大,下面水壓變小。
T=0.375 s時,擺動尾鰭使擺幅達到峰值,在經過峰值位置后,尾鰭變為順時針方向擺動。
T=0.75 s時,當產生的第二個漩渦完全脫離尾鰭,這時魚尾擺幅到中間位置,尾鰭水壓髙低壓區域再次發生變化。
T=1.125 s時,由尾鰭所在前端低壓區開始產生貼身渦流。T=1.12 s時逐漸脫離,該時刻的漩渦旋轉方向變成順時針方向。完成一個周期的運動。

圖2 金槍魚尾鰭一周期運動
2 軟體仿金槍魚機器人結構設計
基于上述對金槍魚推進機理分析,本文設計了一種以氣動驅動的軟體仿金槍魚機器人來模擬金槍魚的運動,其結構如圖3所示。主要由3部分組成,詳細介紹如下。
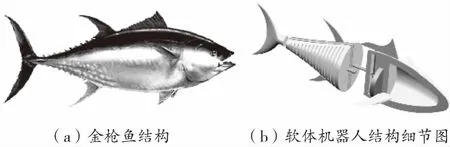
圖3 整體結構模型
2.1 尾部變腔驅動器結構設計
軟體仿金槍魚機器人尾部變腔驅動器單側采用2個獨立氣腔,用于實現軟體機器人的多種運動模式。該尾部變腔驅動器由氣壓驅動,根據充入氣腔內氣壓壓力不同產生不同的彎曲變形角度。為了產生足夠的推力,尾翼被添加在軟體仿金槍魚機器人的末端。尾翼采用金槍魚特有的月牙形,這種翼型相對較為柔軟,經常在水的阻力作用下被動地彎曲,再增加推進力的同時,又能減小側向力,擺動對重心影響也非常小。
單側采用2個獨立長度不同氣腔設計變腔驅動器來制作軟體仿金槍魚尾鰭,不僅更好的符合金槍魚骨骼的特征,也能夠是實現巡游、轉彎、快速應急游動的多種模式。
該軟體仿金槍魚機器人尾部結構主要分為3部分:1)左側變腔驅動器有一大一小2個獨立氣腔,大氣腔有12個連通氣囊,小氣腔有4個連通氣囊;2)位于中間封閉氣腔的約束層;3)右側變腔驅動器有一大一小2個獨立氣腔,大氣腔有12個連通氣囊,小氣腔有4個連通氣囊,具體結構如圖4。各部位尺寸數值如表1。
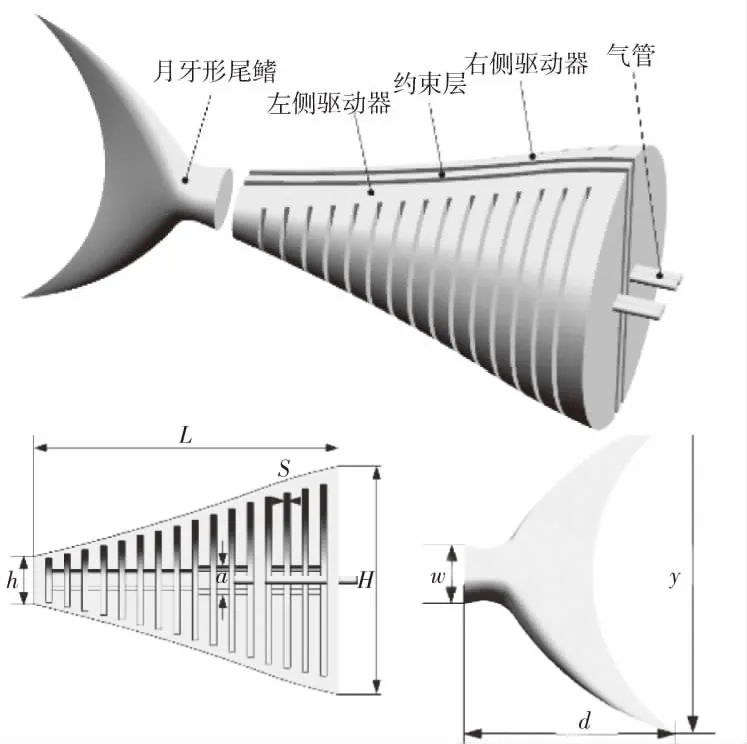
圖4 尾部設計模型
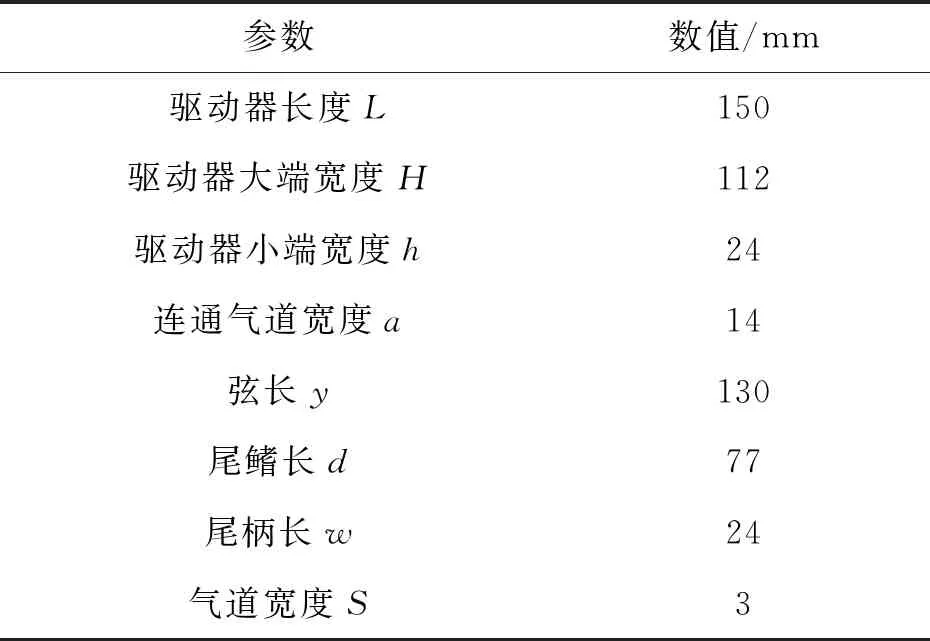
表1 尾部設計參數
2.2 前身結構設計
軟體仿金槍魚機器人的前身采用硅膠材料,前身做成空腔,來實現平衡前后質量,方便氣管在軟體仿金槍魚機器人內部走線,在重心位置增加重心機構,改變密度,增加下沉重力,前身結構設計主要由3部分組成:1)硅膠外殼;2)傳感器固定結構;3)重心結構。模型參數如圖4、表2所示。其中硅膠外殼為通氣結構和重心結構提供密閉空間;通氣結構是為尾部驅動器提供通氣管道,保證氣泵通氣時氣體通過無阻礙;重心結構改變浮心和軟體仿生機器人的密度來確保仿金槍魚機器人能定深。
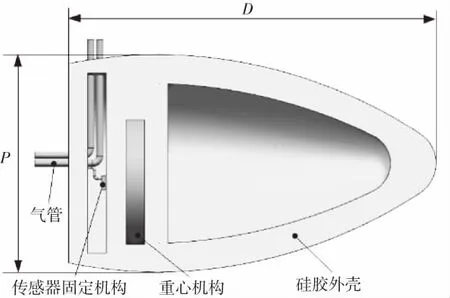
圖5 前身結構模型

表2 前身結構參數
2.3 平衡鰭結構設計
在軟體仿金槍魚機器人游動時,尾部變腔驅動器的往復運動會使軟體仿金槍魚機器人的本體發生旋轉,故應加一些平衡機構進行抑制。軟體仿金槍魚機器人增加第二背鰭與臀鰭以平衡尾鰭推進是對本體產生的力矩;增加胸鰭以提高俯仰控制性能,通過增大第二背鰭與臀鰭,可以平衡胸鰭;第一背鰭用來增加偏航控制性能。
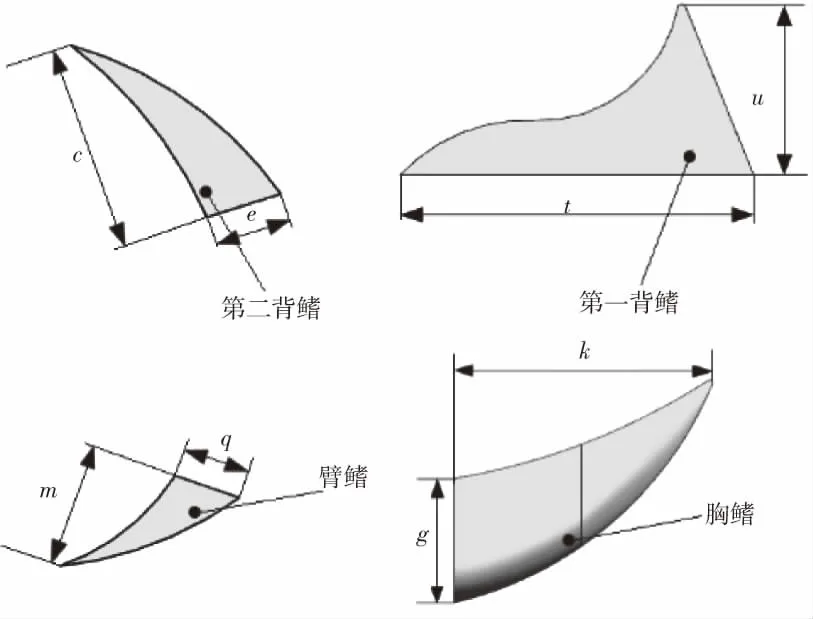
圖6 各平衡鰭結構模型
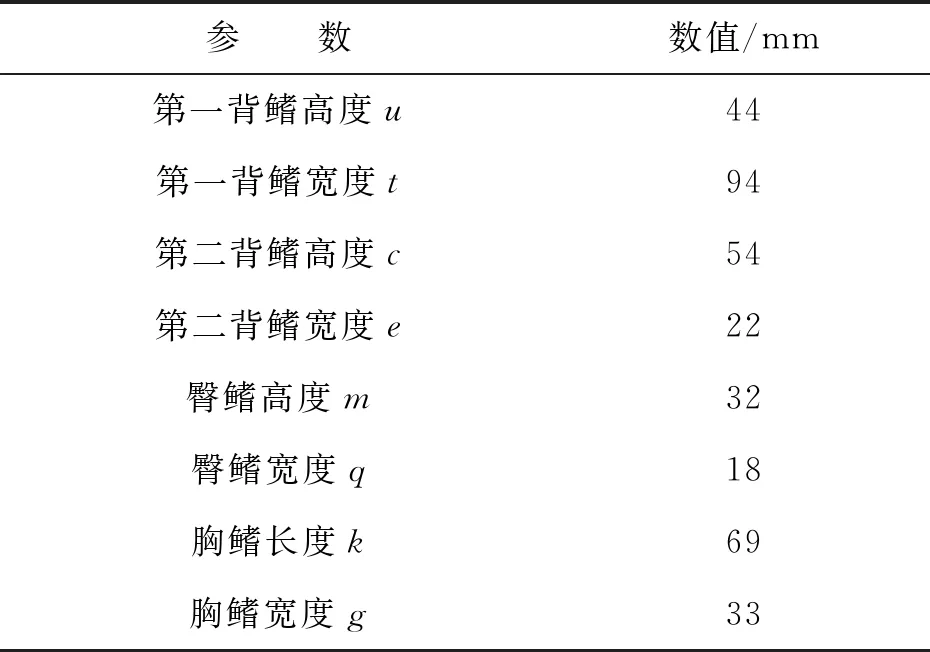
表3 各平衡鰭結構參數
3 軟體仿金槍魚機器人變腔驅動器的力學建模
3.1 本構模型建立
尾部變腔驅動器是由硅橡膠材料利用3D打印模具澆筑而成,基于Yeoh模型理論建立的硅橡膠材料本構關系,用E表示應變能力密度函數,E=E(I1,I2,I3),定義如下:
(1)
設第三不變量I3=1,λ3=1,代入方程(1)可得:
(2)
(3)
代入帶2階Yeoh模型可得:
(4)
式中,C1、C2為系數,C1=0.11和C2=0.02,對方程(4)求偏導得到該應力值化簡方程:
σ=8C1(λ1-1)
(5)
3.2 尾部驅動器的力學模型
尾部驅動器彎曲是由激勵層、約束層和對立層三者相互作用來實現的,如圖7,當氣體通入時,嵌入在彈性激勵層的氣道膨脹,并且第二不可延伸但柔性的約束層用于約束由沿著一側的膨脹通道產生的軸向張力,將彈性體中的橫向應力轉化為彎矩。
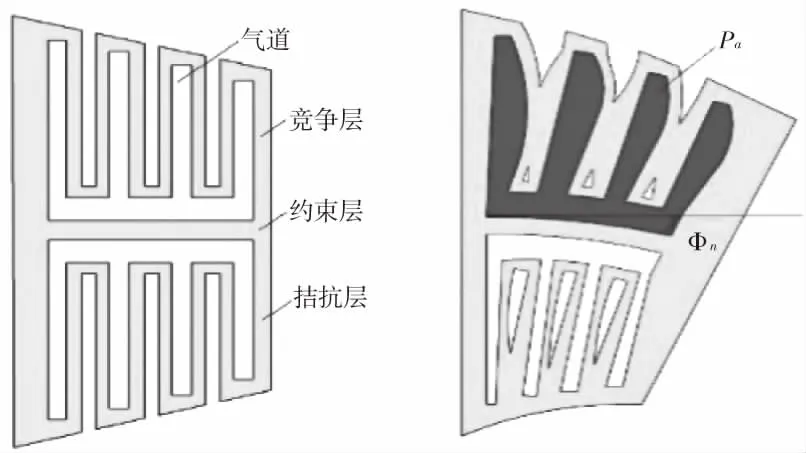
圖7 橫截面分析示意圖
根據通道的物理特性和內部致動器壓力描述了矩形有限元分析的總彎曲角。
(6)
(7)
式中,n是通道數,x是通道寬度,ε是材料應變和材料應力σ的非線性函數,ya和yc是致動器和通道的高度。然而,因為執行器與矩形致動器略有不同,優化得到了一種新的力學模型。在給定的嵌入通道n之后,沿著致動器長度的累積角度θn,θn的物理特性可以用Pa的函數來估計。
(8)
(9)

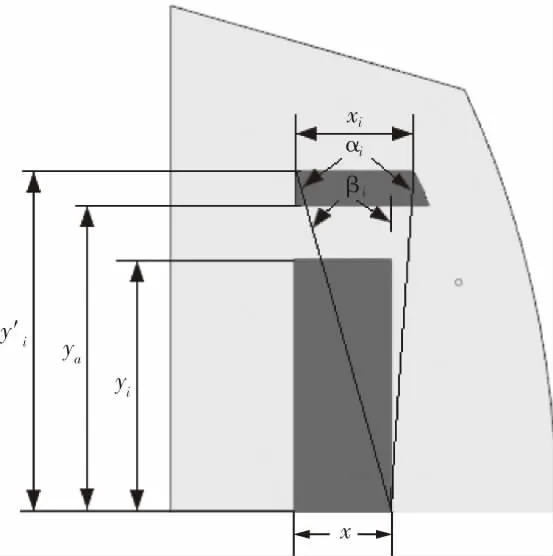
圖8 橫截面膨脹彎曲分析圖
4 軟體仿金槍魚機器人變腔驅動器運動分析及仿真
4.1 變腔驅動器運動分析
本文方案設計的變腔驅動器結構為變高度變體積的兩腔。以氣泵為主要動力源,所需要通入不同的氣壓來對2個變腔體產生彎曲變形。左邊變腔體充氣實現向右彎曲,右邊變腔體充氣實現向左彎曲。軟體機器人在巡游狀態下需要兩變腔體都通氣,左右對稱結構的變腔體通過規律性的充放氣,實現較大擺動角度進行向前游動。當機器人有障礙需要加速躲避時,靠近尾鰭的型腔充氣,尾鰭遠端的型腔不充氣,通過加快擺動頻率,減小擺動角度,來提升瞬間的加速度。
4.2 變腔驅動器仿真分析
在ANSYS軟件中模擬氣體通入變腔驅動器,對變腔驅動器的彎曲變形能力進行仿真分析。由于變腔驅動器是通過硅橡膠材料澆筑成型,本身變形具有非線性,本文通過Yeoh本構方程為計算模型,在不考慮水中阻力和自身重力的理想條件下,對變腔驅動器大小端氣壓仿真分析,不同氣壓變腔驅動器彎曲變形如圖9所示
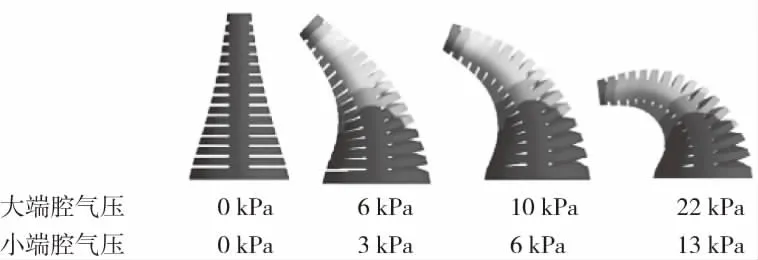
圖9 不同氣壓彎曲形態
4.3 軟體仿金槍魚機器人水動力仿真分析
應用fluent對軟體仿金槍魚機器人本體進行水動力仿真分析,仿真結果如圖10所示。在不同的速度下,由速度云圖可知,軟體仿金槍魚軟體機器人是z軸對稱體結構,所以周圍水流流動有對稱性。由壓力云圖可知,機器人前身前端和胸鰭前端受水流沖擊壓力明顯大于其他位置壓力,機器人會受到與前進方向相反的阻力。
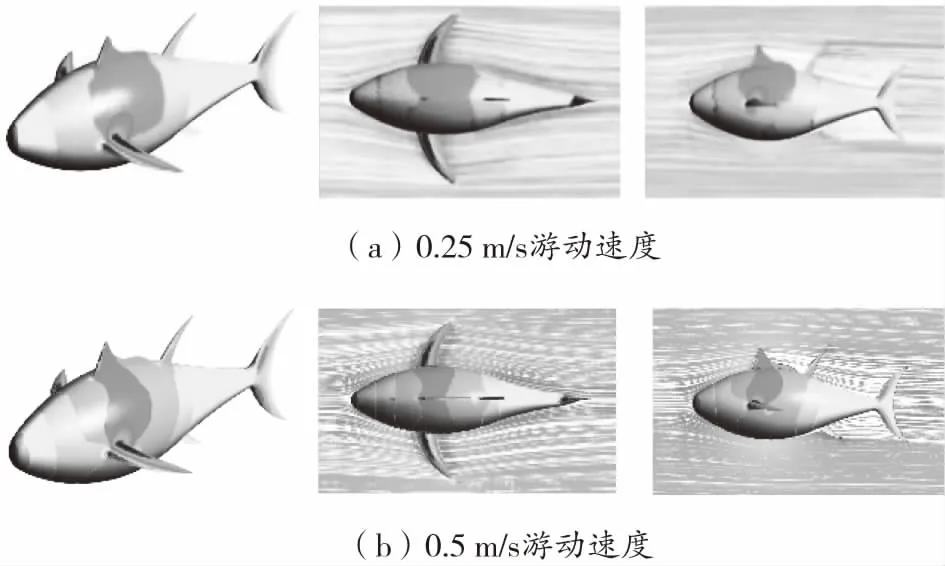
圖10 軟體仿生機器人壓力云圖和流線圖
5 結論
本文設計和分析了一種軟體仿金槍魚機器人來模擬金槍魚的游動,與單通道單氣管通氣型腔結構的驅動器相比,本文設計的是兩通道兩氣管通氣的變體積型腔結構的驅動器,該軟體變高變體積腔體機器人具有響應時間達1.5 s、彎曲極限角度大、推進時效比高的優點。同時仿真結果驗證了軟體仿金槍魚機器人多型腔驅動器滿足彎曲變形需要,整體結構符合水動力特性。
下一步繼續優化機器人整體尺寸結構和型腔結構,設計氣動回路與電控系統來實現軟體仿金槍魚機器人在水下場景的游動。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
