基于CATIA-DMU四連桿懸架不同運動副仿真對比研究
2021-07-10 02:20:36王永衛韓權武
科技與創新 2021年12期
王永衛,韓權武
(北京汽車股份有限公司汽車研究院,北京 101300)
1 概述
本文以某車輛上所采用的四連桿后懸架為研究對象,對空間四連桿機構進行自由度分析,運用CATIA-DMU模塊建立四連桿懸架的運動仿真模型,通過對懸架的不同約束進行仿真,對比輪心點間隙誤差,結合實際懸架運動方式,確認較合適的四連桿懸架DMU運動仿真校核。
2 四連桿懸架自由度分析[1-2]
空間連桿機構常用的運動副類型有轉動副、圓柱副、移動副、球面副、螺旋副、平面副、曲面副等。
自由度為f=1、2、3、4、5的運動副,相應地稱為Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ類運動副;第i類運動副允許i個相對自由度,同時也就有Ci=6-i個約束度。
一般空間機構自由度計算公式分為以下兩類。
2.1 空間機構單封閉環自由度的公式
空間機構單封閉環自由度的公式為:

式(1)中:F為機構自由度;m為各構件在運動時所受到的公共約束數;n為機構活動構件數;p為運動副的級別,由運動副所產生的約束數來決定;fi為機構i類運動副數量。
2.2 開鏈機構的自由度計算公式
開鏈機構的自由度計算公式為:

空間機構不含公共約束的自由度的計算公式為:

式(3)中:n-1為可動構件數;P1~P5為I~V級運動副的數目。
3 四連桿懸架DMU仿真模型建立
四連桿后懸架的結構如圖l所示。CATIA-DMU仿真模塊中,懸架硬點設置點、線、面元素,建立運動副,對于四連桿懸架彈性元件襯套簡化為剛體,不考慮彈性變形。
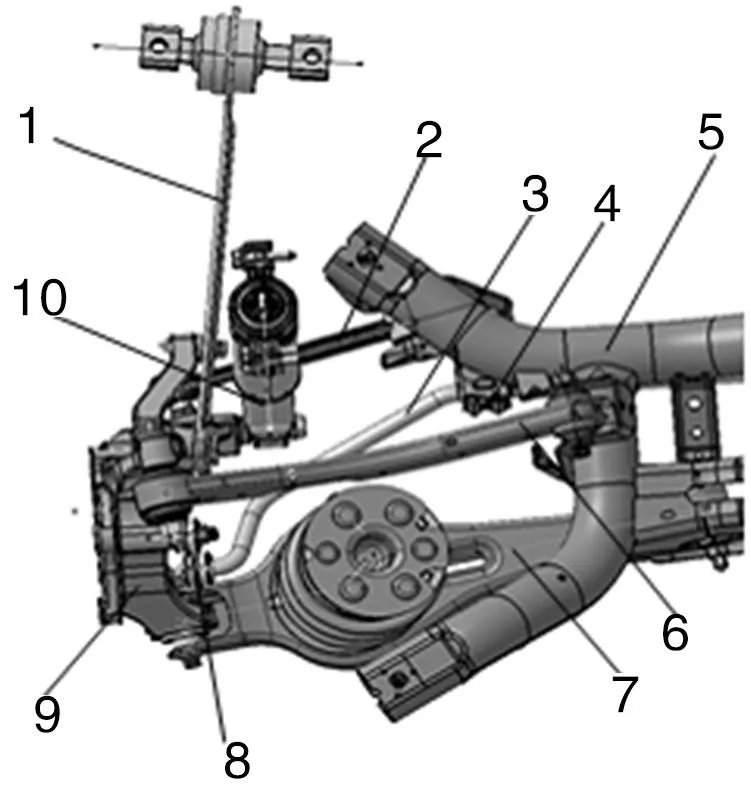
圖1 四連桿懸架結構圖
懸架運動建立輪心點上、下跳模擬實車運動,需要對輪心處進行驅動,建立驅動副如圖2所示。后副車架總成為固定座基礎,在靠近輪心外側處建立一條平行整車Z向直線1,過該直線平行整車坐標平面YZ面1;再新建一個PART作為中間傳遞運動副,做出平行整車Z向直線2,過該直線平行整車YZ面2,同時過輪心做垂直直線2的XY平面2,后副車架與PART建立的面和線運動副滑動副,并作為驅動;過輪心面與輪心點建立點曲面運動副。設置驅動行程為輪心上、下跳行程(﹣62 mm,130 mm)。
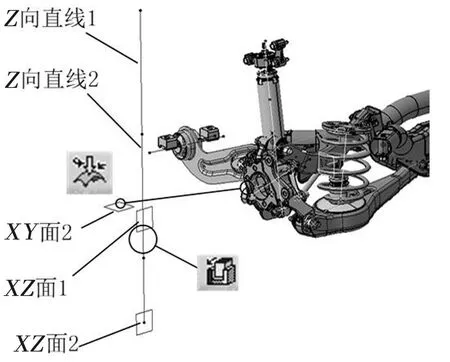
圖2 驅動副建立示意圖
四連桿懸架拖曳臂運動副建立方案1如圖3所示。從圖3中可看出,若相關四連桿桿系與后副車架連接為U型結合,與轉向節連接為球面結合,拖曳臂與轉向節固聯,與車身采用球絞結合。按照公式(3)中,W=﹣1,約束過多,無法進行運動。與DMU仿真報錯提示“機械命令過多”一致,因此,需要對某桿件進行約束放開,保證自由度為0。以下是建立兩種放開不同點約束的方法。
3.1 托曳臂襯套中心設置點曲線運動副
圖3 中,托曳臂襯套中心在后副車架數模中建立襯套軸線,建立點曲線結合,托曳臂一端與轉向節固聯,后前束調連桿與后副車架建立通用結合,與后轉向節建立球面結合。
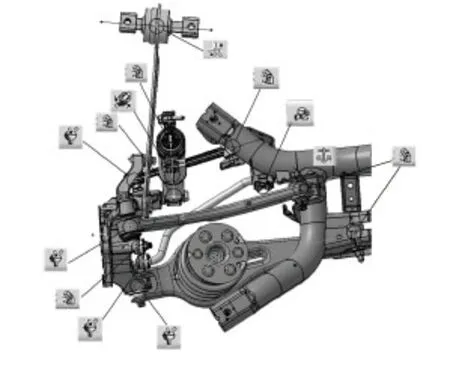
圖3 四連桿懸架拖曳臂運動副建立方案1
3.2 后前束調整桿內點設置點曲線運動副
四連桿懸架后調整桿運動副建立方案2如圖4所示。圖4中,托曳臂襯套中心在后副車架數模中建立襯套中心點,兩者球面結合,與轉向節固聯結合;后前束調整桿內點中心點處后副車架數模中建立一條水平線,后前束調整桿與后副車架設置點曲線結合,與轉向節通用結合。
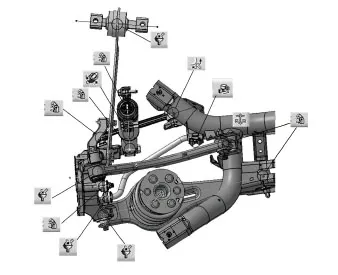
圖4 四連桿懸架后調整桿運動副建立方案2
以上兩種建立不同運動副方法完成后,建立機械運動1和機械運動2,進行仿真模擬。
4 輪心點運動仿真對比
對比以下輪心點運動軌跡位移,比較兩者在整車坐標系X、Y、Z方向位移的差異,分別如圖5、圖6、圖7所示。
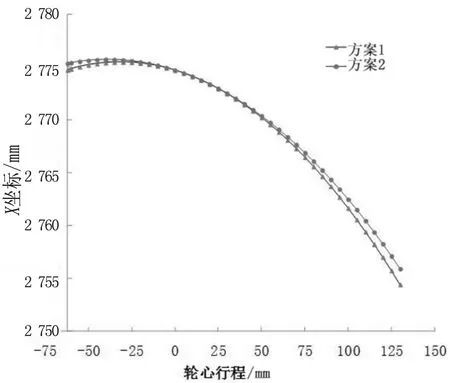
圖5 輪心在X向位移對比曲線
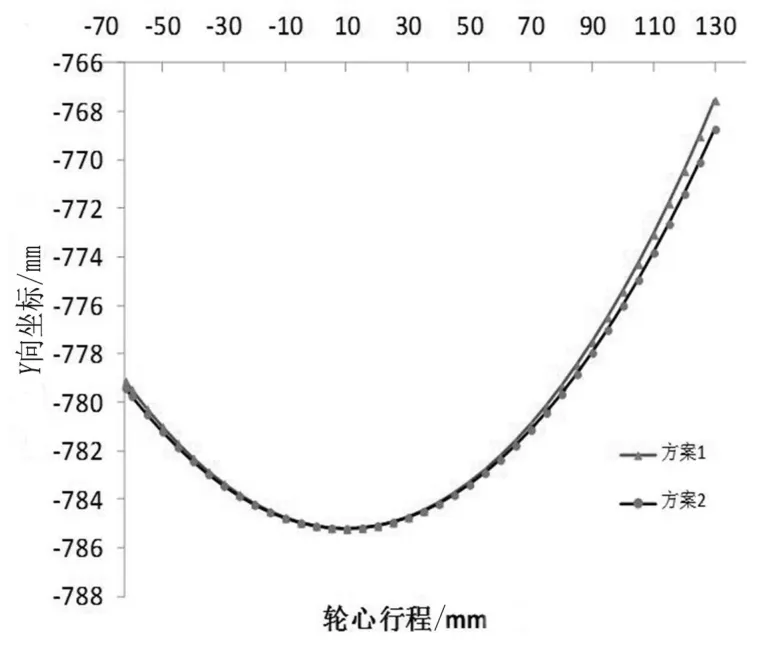
圖6 輪心在Y向位移對比曲線
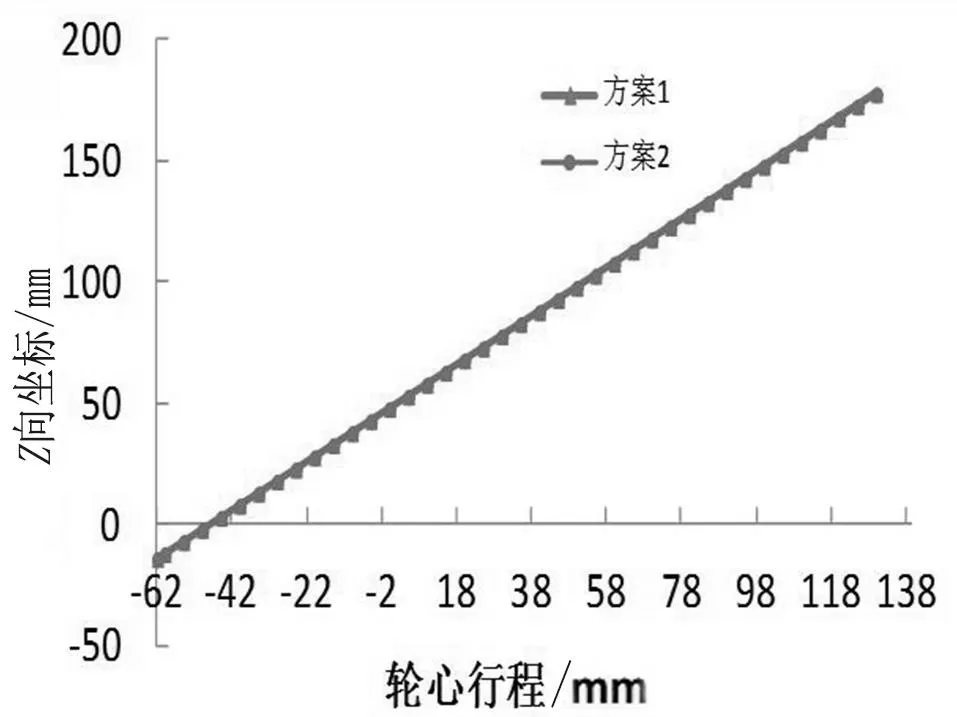
圖7 輪心在Z向位移對比曲線
方案1和方案2輪心行程(﹣62 mm,130 mm),X向兩者差值在1.5 mm以內;Y向兩者差值在1.2 mm以內;Z向運動軌跡重合。方案1和方案2輪心在相同懸架行程范圍內誤差量在整個間隙校核過程中較小,基本忽略,兩者不同約束運動副建立不影響間隙校核。
拖曳臂襯套軸向剛度曲線如圖8所示。在實際過程中,方案2保持拖曳臂襯套不動,但實際托曳臂襯套屬于大襯套,相關襯套剛度比后調整連桿襯套剛度各向較小,托曳臂襯套在X、Y、Z運動幅度較大。放開拖曳臂襯套中心點與實際受力情況分析:拖曳臂襯套在實際各種載荷工況下,提取載荷力,縱向沖擊2.0 g中拖曳臂襯套Y向受力最大,本開發車型載荷約930 N,方向朝整車中心面;圖8中,拖曳臂襯套軸向剛度取值Y向約5 mm左右,方案1拖曳臂襯套中心運動軌跡Y向朝整車中心面運動量有7 mm,拖曳臂襯套設置點曲線運動副產生方向與實際襯套軸向受力方向一致。方案1托曳臂襯套運動更符合實際運動。
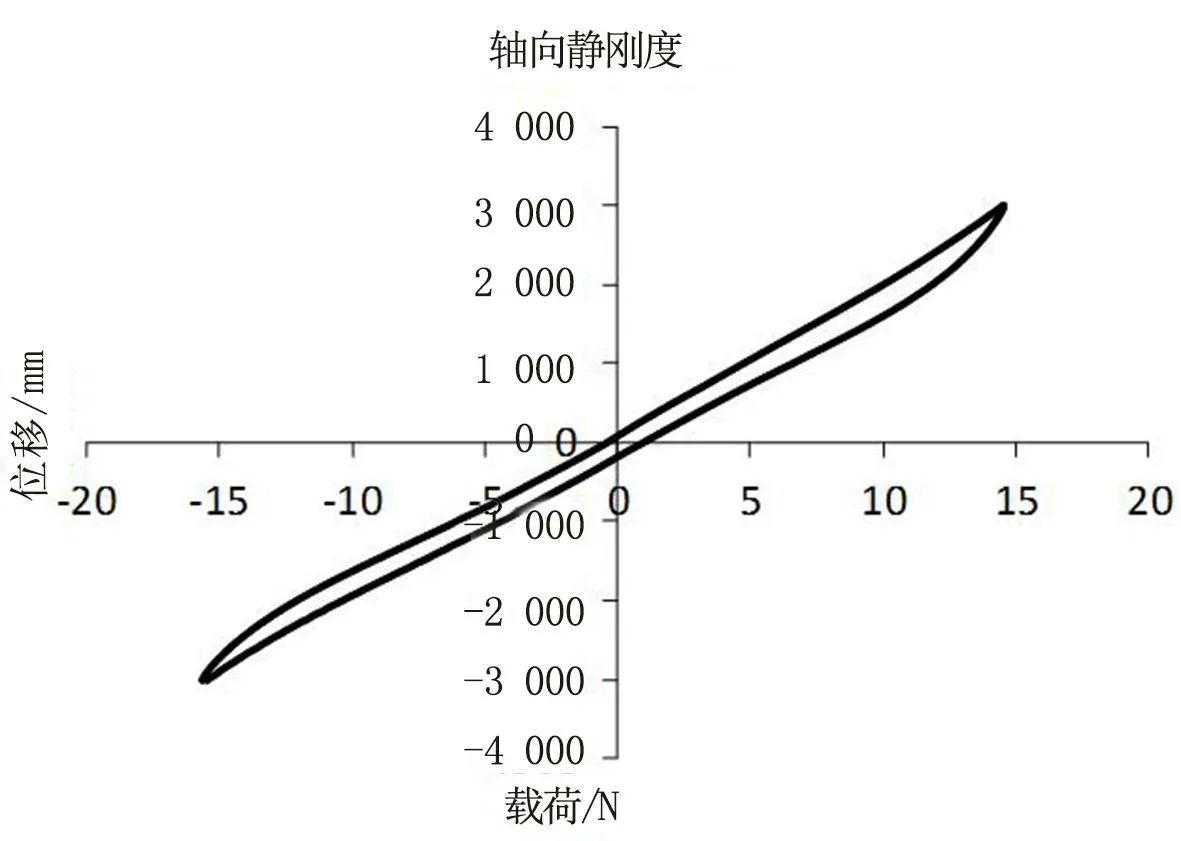
圖8 拖曳臂襯套軸向剛度曲線
5 結束語
以上對比分析,CATIA-DMU校核四連桿運動,桿系運動副建立方式不同,但兩者產生間隙誤差較小,都可應用;實際運動符合情況不考慮襯套彈性變形,拖曳臂襯套設置點曲線運動副約束,更符合實際運動情況,有利于懸架間隙校核。