基于菌群優化算法優化生產車間傳感網能耗
2021-07-07 02:43:08王海林張春光唐超塵
濟南大學學報(自然科學版) 2021年4期
關鍵詞:優化
王海林,張春光,唐超塵,劉 鑫
(1.廣州商學院 信息技術與工程學院,廣東 廣州 510555;2.北京科技大學 計算機與通信工程學院,北京 100083;3.西安電子科技大學 通信工程學院,陜西 西安 710071;4.桂林理工大學 信息科學與工程學院,廣西 桂林 541004)
隨著物聯網技術和傳感網技術的發展,智能化的生產車間得到了充分應用[1],將企業生產車間的生產環節、環境、工具和人員等進行數字化管理與監控,為車間的生產管理提供了有效保障。通過前端行使數據采集功能的傳感器獲取生產各步驟的數據,然后通過傳感器網絡將采集數據進行不斷轉發與路由,搜集至網關節點,最后通過網關節點發送至應用層網絡,在應用層實現數據的分析、監控與可視化管理等。
前端的數據采集和后端的數據分析實現方法比較常見,其中前端可以根據生產過程的需要布置傳感器節點[2],后端只要獲得有效數據就可以進行純上層應用開發。相比之下,中端的傳感網數據的傳輸部分最為關鍵,如果僅采用自組網的網絡方式,就會造成資源浪費或者因傳輸能耗不均衡而導致網絡不穩定[3],甚至不能傳輸數據。
本文中研究如何采用智能算法對傳感器網絡能耗進行分析,采用基于菌群優化的徑向基函數(RBF)神經網絡算法(簡稱本文算法)對傳感網數據進行融合,去除冗余感知數據并降低數據維度。首先分析傳感網節點的分簇及數據傳輸方式,然后建立基于徑向基函數神經網絡的生產車間傳感網數據融合模型,引入菌群算法,利用菌群算法的趨化、復制和遷徙操作對神經網絡的權重進行優化,獲得穩定的RBF神經網絡結構,以便能夠降低能耗,提高傳感網的使用強度,改善生產車間傳感網絡傳輸的穩定性。
1 傳感網能耗優化
傳感網絡的應用環境不同于一般網絡,在能源提供方面,大部分節點采用的是電池供電方式,當電池耗盡時,傳感節點將停止工作,與所連傳感網絡“脫網”。為了避免頻繁地更換電池,且考慮到生產車間一般需要的傳感器節點數目多、分布面積較廣等現狀,必須控制生產車間的傳感網能耗[4],提高傳感網能源利用率。目前,關于傳感網的能耗優化主要從以下2個方面考慮:一是傳感數據融合,通過將多個傳感器采集的數據進行有效融合,對原始數據及特征進行訓練,去冗余優化后獲取特征更強的數據,這種數據量的優化能夠降低傳感網能耗;二是通過智能算法優化傳感網節點的簇首及路徑,合理選擇簇首節點及路徑[5],控制擁塞,均衡處理網絡能耗。
目前主流的傳感網數據傳輸協議為低能耗自適應聚類分層協議算法(LEACH)結構,將傳感節點分為簇首和普通節點[6],節點分布如圖1所示。根據應用環境特點、場地分布以及需要獲取的傳感數據精度等,可以將需要分析的傳感節點進行分簇,降低整個傳感網絡的復雜度。傳感節點的傳輸方式主要是通過路由和轉發完成,工作方式如圖2所示。

圖1 低能耗自適應聚類分層協議算法(LEACH)節點分布
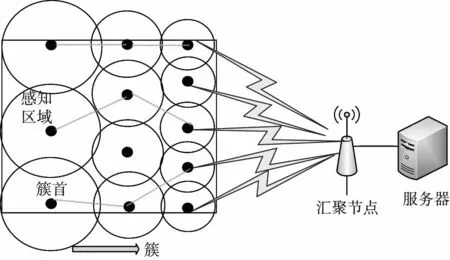
圖2 數據傳輸基本流程
在所有傳感節點傳輸到匯聚節點之前,經過有效數據融合,減少數據量,有效地提高了傳感節點能量使用效率。
2 菌群優化的RBF神經網絡
2.1 RBF神經網絡
設輸入樣本為Xi=(x1,x2,…,xn),i=1,2,…,m,其中m、n分別為樣本總量和單個樣本的特征總數。一般而言,輸入層神經元個數和特征總數相等,經過樣本特征篩選凈化后,輸入層神經元數量一般小于特征總數[7]。第k個樣本經過模型運算得到的輸出為Yk=(y1,y2,…,yN),N為輸出層神經元個數。
首先,輸入樣本經過權重到達隱藏層第1層的S1j[8]為
(1)
式中:Sij為隱藏層第1層第j個神經元的輸出;W1ij為隱藏層第1層第j個神經元與輸入層第i個節點的連接權重;θ1j為隱藏層第1層的第j個神經元的偏置向量;p為隱藏層第1層神經元總數。
S1j經過特征轉換函數[9]后可得
(2)

經過所有隱藏層的輸出結果[10]為
(3)
式中:Lt為t時刻的隱藏層輸出值;Vj t為t時刻的第j個神經元的權重。
以此類推,經過Gaussian函數求解得到整個模型的輸出結果。
2.2 菌群算法
設菌群個體總數為S,個體的優化維度為ρ,通過不斷的趨化(次數為j)、復制(次數為k)和遷移(次數為l)操作,獲得適應度值大的優良個體[11]。主要參數如下:da為引力深度;ωa為引力寬度;ωr為斥力高度;hr為斥力寬度;Pe為遷移驅散概率;Nc為總趨化次數;C(i)為趨化更新步長;Nr為總復制次數;Ne為總遷徙次數。
設第i個個體θ(i)(j,k,l)的趨化位置更新方法[12]為
θ(i)(j+1,k,l)=θ(i)(j,k,l)+C(i)。
(4)

(5)


P=Amin+rand(Amax-Amin),
(6)
式中:Amin和Amax分別為邊界最小值和最大值;rand(·)為在(0,1)范圍內隨機取值的函數。
2.3 菌群優化的RBF神經網絡
RBF神經網絡的優化主要有以下2種途徑:一是通過算法不斷優化RBF神經網絡的各層權重,通過權重優化,使RBF神經網絡的輸出結果與實際結果更接近;二是通過算法不斷調整RBF神經網絡的節點數以及節點分布,使得RBF神經網絡的輸出結果與實際結果更接近。在實際操作中,也可以將這2種途徑混合使用,從而能夠得到全局最優解。
本文中采用菌群算法對RBF神經網絡權重進行優化,根據初始權重及隨機預設節點生成的網絡模型結構,把該網絡結果進行數學表示及編碼,數學表示為矩陣的形式,將多個權重矩陣作為菌群算法的輸入集合,選擇誤差函數較小的網絡結構模型進行算法優化。
菌群混合優化得到的最優個體的過程,實際就是求解RBF神經網絡權重最優解的過程,獲得了權重最優解就能夠確定RBF神經網絡的生產車間傳感網能耗降低模型[14]。菌群算法訓練的最優結果為最優RBF神經網絡結構模型。經過混合菌群優化的RBF神經網絡降低生產車間傳感網能耗的大致流程如下:
1)采集傳感網能耗樣本,然后進行初始化及向量化;
2)建立基于RBF神經網絡的傳感網能耗降低模型,由S個節點組成;
3)隨機產生RBF神經網絡權重;

5)根據菌群算法進行迭代和遷移過程,并判斷是否滿足截止條件,滿足則跳轉下一步,否則繼續迭代操作;

7)得到優化后的RBF神經網絡結構模型,可有效降低各個傳感網節點的能耗。
具體流程如圖3所示。
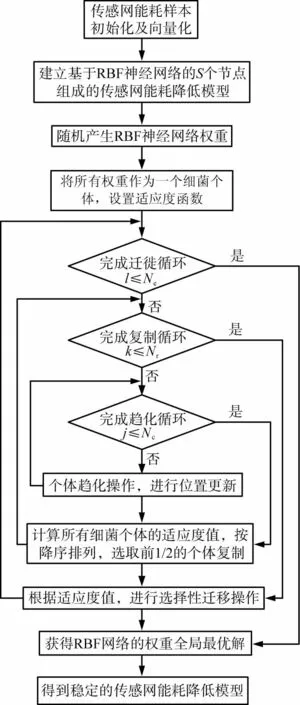
l—個體遷移次數;k—個體復制次數;j—個體趨化次數;Nr—總復制次數;Nc—總趨化次數;Ne—總遷徙次數。圖3 菌群優化徑向基函數(RBF)神經網絡的傳感網能耗降低流程
3 實例仿真
為了驗證菌群優化RBF神經網絡在生產車間傳感網能耗降低的性能,采用MATLAB軟件和NS2軟件進行仿真,將常用的傳感網能耗優化方法,如能量感知非均勻分簇(EAUC)、LEACH和自組織特征映射數據算法(SOFMDA),與本文算法進行能耗性能對比[15-16]。仿真環境主要參數見表1。在仿真過程中,RBF神經網絡的輸入和輸出傳感節點個數分別為1 012和15,隱藏層神經元個數為20。

表1 仿真環境參數
3.1 不同算法的傳感網能耗優化
3.1.1 傳感網存活節點數
不同算法的傳感網存活節點數如圖4所示。從圖中可看出,隨著訓練輪次的增加,訓練時間增加,而存活節點數減少,EAUC、LEACH和SOFMDA算法在運行時間為400 s時開始出現傳感網節點電池耗盡的情況,而本文算法在運行時間為520 s左右開始有節點“脫網”。在運行時間為400~800 s時,經過EAUC、LEACH和SOFMDA算法優化的傳感網節點數量減少速度快,其中EAUC算法的性能最差。在運行1 100 s時,EAUC、LEACH和SOFMDA算法的在網節點數為0,而運行1 400 s時,本文算法的在網節點數才開始趨0。
3.1.2 網絡節點平均能耗
初始設置共有1 012個網絡節點,每個節點初始能量為1 J,因此全網所有節點共有能量1 012 J。通過不斷地分簇和路由傳輸,對4種算法在不同運行輪數的能耗進行仿真,結果如表2所示。

表2 不同算法的節點能耗比較
由表中數據可以看出,隨著運行輪次不斷增加,生產車間的傳感網能耗不斷增大。當運行輪次為200~800時,4種算法的能耗均增加較快;而當運行輪次達到1 100時,EAUC、LEACH和SOFMDA算法的能耗趨于穩定值,約為999 J,此時網絡中的節點能量大部分均已消耗。由于本文算法的網絡存活節點數減少緩慢,因此能量消耗持續的時間較長。在運行輪次達到1 500時,4種算法優化的傳感網所有節點均停止工作,能耗總量達到1 012 J。
3.1.3 數據包接收結果
對匯聚節點接收的數據包進行仿真。從普通節點開始定時、定量上行發包,統計在網絡所有節點能耗耗費完之前匯聚節點接收的數據量,結果如圖5所示。由圖可以看出,所有節點能量消耗完畢后,本文中提出的算法的傳感網匯聚節點收到的數據包個數最多約為5.5×104,EAUC算法的最差,約為4.5×104。在運行時間為200~1 000 s的快速增長期內,相比其他3種算法,本文算法匯聚節點收到的數據包優勢明顯,獲得更好的數據通信效果。

EAUC—能量感知非均勻分簇;LEACH—低能耗自適應聚類分層協議算法;SOFMDA—自組織特征映射數據算法;本文算法—基于菌群優化的徑向基函數神經網絡算法。圖4 不同算法的傳感網存活節點數量
3.2 菌群優化性能
為了進一步驗證改進的菌群算法對傳感網能耗降低的影響,對菌群優化RBF神經網絡的能耗進行優化。

EAUC—能量感知非均勻分簇;LEACH—低能耗自適應聚類分層協議算法;SOFMDA—自組織特征映射數據算法;本文算法—基于菌群優化的徑向基函數神經網絡算法。圖5 不同算法的匯聚節點接收的數據包數量
結合表1,菌群算法的主要參數設置值為S=100,Nc=100,Nr=10,Ne=5,Pe=0.2,C(i)=0.1,da=hr=0.01,ωa=ωr=10。
3.2.1 菌群優化算法性能提升
RBF神經網絡算法和本文算法的存活節點數如圖6所示。通過對比可以看出,經過菌群優化的RBF神經網絡能減慢傳感網節點數的“脫網”速度,而且網絡節點數減少的速度更平緩。

RBF—徑向基函數;本文算法—基于菌群優化的徑向基函數神經網絡算法。圖6 菌群優化對傳感網存活節點數的影響
3.2.2 不同趨化步長的降耗性能
為了進一步分析菌群優化算法對傳感網能耗降低的優化性能,選擇運行輪次數為800,對趨化步長差異化設置,驗證趨化步長對傳感網的影響,仿真結果如表3所示。對比發現,趨化步長為0.12時,存活節點數和匯聚節點接收的數據包數均取得了最優值,對傳感網能耗優化更明顯。

表3 菌群趨化步長對傳感網能耗影響
4 結語
本文中采用菌群優化RBF神經網絡進行生產車間傳感網能耗優化,實驗證明,該方法能夠有效延緩傳感網節點“脫網”速度,在有限能量內有效匯聚節點,從而接收到更多的數據。后續研究將進一步差異化調整菌群算法參數,不斷降低傳感網能耗,提高生產車間數字化管理水平。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
