中段彈道目標(biāo)分離過程動態(tài)散射特性分析
2021-07-05 11:30:48趙鋒徐志明吳其華艾小鋒
雷達(dá)學(xué)報 2021年3期
關(guān)鍵詞:特征
趙鋒 徐志明 吳其華 艾小鋒
(國防科技大學(xué)電子科學(xué)學(xué)院電子信息系統(tǒng)復(fù)雜電磁環(huán)境效應(yīng)國家重點(diǎn)實(shí)驗(yàn)室 長沙 410073)
1 引言
彈道導(dǎo)彈作為一款“殺手锏”武器,具有飛行距離遠(yuǎn)、作用范圍大、反攔截能力強(qiáng)等眾多優(yōu)點(diǎn)。面對彈道導(dǎo)彈的威脅,以美國為首的軍事強(qiáng)國開始著力發(fā)展彈道導(dǎo)彈攔截系統(tǒng)。彈道導(dǎo)彈中段飛行距離最長,為了延長預(yù)警時間,提高攔截成功率,目前各國發(fā)展彈道導(dǎo)彈攔截技術(shù)的重點(diǎn)均放在中段[1,2]。在中段飛行過程中,彈道導(dǎo)彈會經(jīng)歷整流罩分離、彈頭與母艙分離,釋放誘餌等事件。由于中段大氣阻力可以忽略不計,彈頭、母艙、誘餌、碎片等目標(biāo)會形成一個“目標(biāo)群”,給彈道目標(biāo)的跟蹤[3,4]、識別和攔截帶來了極大的挑戰(zhàn)。
當(dāng)彈頭、誘餌、母艙分別位于不同的距離單元,利用彈頭的雷達(dá)散射截面積(Radar Cross Section,RCS)序列[5],微動特性[2,6],高分辨率雷達(dá)圖像[7],極化特性[8,9]對目標(biāo)進(jìn)行分類識別的技術(shù)已經(jīng)較為成熟。當(dāng)多個目標(biāo)位于同一個距離單元,在對目標(biāo)進(jìn)行識別之前,多個目標(biāo)的分離是至關(guān)重要的。目前,針對中段彈道群目標(biāo)的目標(biāo)分離、參數(shù)估計和識別已經(jīng)展開初步研究。針對中段群目標(biāo)的分離,空軍工程大學(xué)張群教授團(tuán)隊(duì)[10,11]提出了在距離像序列構(gòu)成的圖像域上利用形態(tài)學(xué)濾波、骨骼提取和滑窗跟蹤技術(shù)分別提取群目標(biāo)微多普勒曲線的方法。西安電子科技大學(xué)劉宏偉教授團(tuán)隊(duì)[12]將時頻分布上微多普勒曲線看作運(yùn)動航跡,并利用航跡追蹤算法分離出了多分量的微多普勒曲線。馮存前教授團(tuán)隊(duì)[13–16]研究了基于離散正弦調(diào)頻變換、時頻圖像背景差分、正交匹配追蹤算法、時頻域聯(lián)合濾波等多微動目標(biāo)的時頻曲線分離方法。涂世杰等人[17]將獨(dú)立成分分析與模糊支持向量機(jī)相結(jié)合,對群目標(biāo)的雷達(dá)回波進(jìn)行分離并實(shí)現(xiàn)了真實(shí)彈頭的有效識別。
上述研究均將群目標(biāo)看作多個獨(dú)立目標(biāo)的組合,未考慮目標(biāo)之間的電磁耦合現(xiàn)象。實(shí)際場景中,如圖1所示,在彈頭與母艙的分離過程前期,兩目標(biāo)距離較近構(gòu)成緊鄰結(jié)構(gòu),電磁耦合現(xiàn)象明顯,不能簡單看作兩個獨(dú)立目標(biāo)的組合。如果將電磁耦合看作目標(biāo)分離的“信標(biāo)”,就可以及時集中雷達(dá)資源,檢測、跟蹤和識別由于分離過程產(chǎn)生的多個目標(biāo),篩選威脅系數(shù)較大的中段彈道目標(biāo),避免“跟丟”和“跟錯”現(xiàn)象。因此,動態(tài)散射特性的研究對于中段彈道目標(biāo)分離過程至關(guān)重要。本文針對窄帶預(yù)警雷達(dá)探測背景下中段彈道目標(biāo)3種分離方式的動態(tài)散射特性進(jìn)行了深入分析,總結(jié)出了一般規(guī)律,優(yōu)選出RCS均值、極化比、特征角、對稱角等可以判斷目標(biāo)分離事件發(fā)生的特征量,為以后針對中段彈道目標(biāo)分離過程動態(tài)散射特性的研究奠定了基礎(chǔ)。
2 中段彈道目標(biāo)動態(tài)散射計算模型
如圖2所示,本文選取的電磁計算模型為錐柱組合結(jié)構(gòu),錐體和柱體的高度分別為0.5m和0.6m,底面半徑為0.15m,材料為金屬。為了實(shí)現(xiàn)中段彈道目標(biāo)分離過程的動態(tài)計算,控制柱體結(jié)構(gòu)沿z軸的負(fù)方向移動。每移動一次,利用多層快速多極子(Multi-Level Fast Multipole Algorithm,MLFMA)進(jìn)行靜態(tài)電磁計算。錐柱組合體為旋轉(zhuǎn)對稱目標(biāo),目標(biāo)的散射響應(yīng)與方位角無關(guān),因此電磁計算的角度掃描設(shè)置為:方位角φ=0°;俯仰角θ=0°~30°,角度步進(jìn)θ為0.2°。其中方位角定義為與x軸的夾角,俯仰角定義為與z軸的夾角。電磁計算的頻率設(shè)置為3GHz。電磁波入射方向的極化基(H,V)定義為式(1)。

圖2 中段彈道目標(biāo)結(jié)構(gòu)示意圖Fig.2 Structure of mid-course ballistic targets
其中,‘×’代表向量的叉乘運(yùn)算;ki為電磁波入射方向的單位向量;‖?‖2為向量的模。
如圖3所示,為了模擬中段彈道目標(biāo)實(shí)際的分離過程,分別采用3種方式控制柱體向后移動。分離方式A:錐體與柱體分離,柱體單純往下平移;分離方式B:錐體與柱體分離,柱體往下平移過程中,以y軸為旋轉(zhuǎn)軸勻速旋轉(zhuǎn),在該分離過程中,xOz平面一直為錐體和柱體的對稱平面;分離方式C:錐體與柱體分離,柱體往下平移過程中,以x軸為旋轉(zhuǎn)軸勻速旋轉(zhuǎn),在該分離過程中,xOz平面僅在特殊時刻同時是錐體和柱體的對稱平面。3種分離方式柱體向下移動的距離單位均為0.05m,分離方式B和分離方式C中柱體每次旋轉(zhuǎn)的角度單位均為9°,旋轉(zhuǎn)中心為柱體軸線的中點(diǎn)。3種分離方式共執(zhí)行移動201次,對應(yīng)的距離變化范圍為0~10m,柱體共旋轉(zhuǎn)5圈。

圖3 錐柱組合體目標(biāo)3種分離方式示意圖(紙面代表圖2中的xOz平面)Fig.3 Three types of separation movements for cone-cylindershaped ballistic targets(xOzplane in Fig.2coincides with the paper)
3 中段彈道目標(biāo)分離過程動態(tài)散射特性分析
本節(jié)首先分析了中段彈道目標(biāo)分離過程動態(tài)RCS分布的“形態(tài)”以及直觀的規(guī)律,然后從RCS均值、極化比、特征角、對稱角幾個參數(shù)的角度分析了其在分離過程中的變化規(guī)律,為以后的分離過程提供判別的量化指標(biāo)。
3.1 動態(tài)RCS分布
圖3中3種分離方式下,錐柱組合體的動態(tài)RCS分別如圖4—圖6所示。圖中三維的坐標(biāo)分別是電磁波入射角度,錐柱組合體分離距離和RCS的對數(shù)值。
從圖4可以看出,在分離方式A條件下,錐柱組合體的動態(tài)RCS變化在電磁波方向維度波動較大,而隨著目標(biāo)的分離,RCS的起伏較小。此時,錐柱組合體的RCS改變主要取決于中段彈道目標(biāo)的運(yùn)動引起相對雷達(dá)的姿態(tài)角變化。根據(jù)雷達(dá)極化學(xué)可知,由于隨著目標(biāo)的分離,極化參考平面xOz同時是錐體和柱體的對稱平面,因此交叉極化一直很弱,理論值為0。
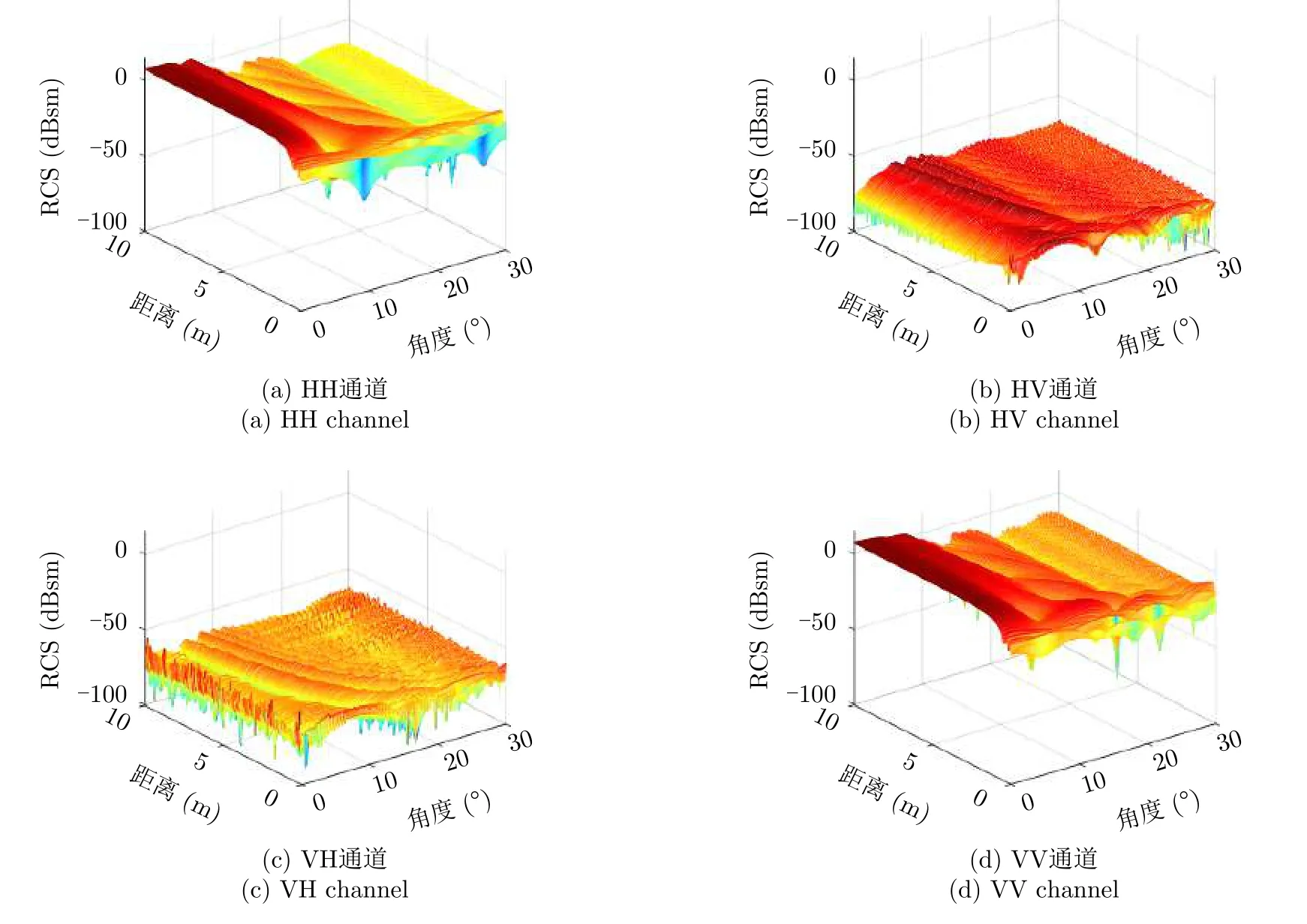
圖4 錐柱組合體分離方式A動態(tài)RCS分布Fig.4 Dynamic RCS distribution of cone-cylinder-shaped targets with separation movement A
從圖5可以看出,在分離方式B條件下,由于柱體在向后的運(yùn)動過程中還存在翻滾運(yùn)動,錐柱組合體RCS隨著目標(biāo)分離起伏劇烈,而此時目標(biāo)相對于雷達(dá)姿態(tài)改變引起的RCS改變則相對顯得“平緩”。雖然柱體在向后的分離過程中引入了翻滾運(yùn)動,但是與分離方式A相同,極化參考平面xOz同時是錐體和柱體的對稱平面,因此交叉極化響應(yīng)仍很弱,理論值為0。
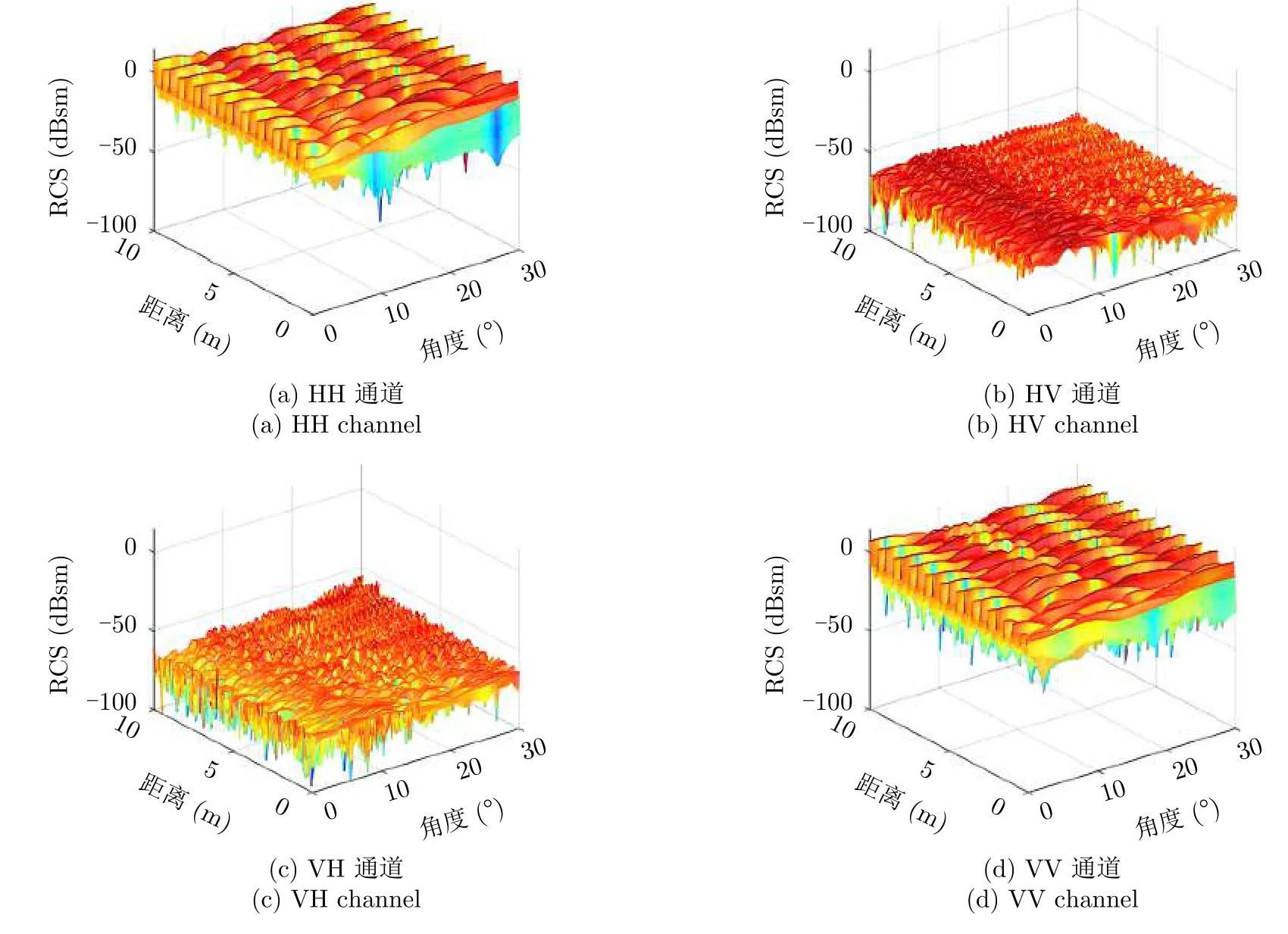
圖5 錐柱組合體分離方式B動態(tài)RCS分布Fig.5 Dynamic RCS distribution of cone-cylinder-shaped targets with separation movement B
從圖6可以看出,分離方式C最明顯的特征是交叉極化響應(yīng)增強(qiáng)。錐柱組合體的交叉極化和主極化響應(yīng)的強(qiáng)度均隨著錐體和柱體的分離起伏劇烈,且交叉極化響應(yīng)的峰值與主極化響應(yīng)的峰值交錯分布。

圖6 錐柱組合體分離方式C動態(tài)RCS分布Fig.6 Dynamic RCS distribution of cone-cylinder-shaped targets with separation movement C
3.2 目標(biāo)分離事件特征
(1)RCS均值
為了衡量中段彈道目標(biāo)RCS在分離過程中的動態(tài)變化,對每次分離狀態(tài)下俯仰角θ=0°~30°范圍內(nèi)的RCS進(jìn)行數(shù)學(xué)平均,RCS均值的定義為
其中,N為總的角度點(diǎn)數(shù)。
3種分離方式的RCS均值在中段彈道目標(biāo)分離過程中的動態(tài)變化如圖7所示。圖7(a)中分離方式A的RCS均值變化較為“緩和”,從目標(biāo)分離開始到錐體與柱體相距20λ,主極化RCS均值整體趨勢是變大,增幅約20dB;錐體與柱體相距20λ~100λ以后,兩個目標(biāo)之間的電磁耦合效應(yīng)可以忽略不計,因此總的RCS趨于穩(wěn)定。符合隨著目標(biāo)結(jié)構(gòu)變復(fù)雜,RCS增大的認(rèn)知。
引入柱體的翻滾運(yùn)動后,分離方式B主極化RCS均呈現(xiàn)較大的起伏。分離方式B中存在兩種“特殊”目標(biāo)狀態(tài):“狀態(tài)1”是當(dāng)柱體旋轉(zhuǎn)到母線與電磁波方向垂直時,柱體的側(cè)面發(fā)生鏡面反射,RCS很大;“狀態(tài)2”是當(dāng)柱體的軸線和錐體的軸線共線時,狀態(tài)相當(dāng)于分離方式A,由于錐體和柱體的邊緣繞射,RCS較大。柱體旋轉(zhuǎn)1圈,會存在2次“狀態(tài)1”和2次“狀態(tài)2”。在本文的中段彈道目標(biāo)動態(tài)散射計算模型中,柱體共旋轉(zhuǎn)了5圈。因此,圖7(b)中出現(xiàn)了20個RCS峰值,其中高的峰值對應(yīng)“狀態(tài)1”,矮的峰值對應(yīng)“狀態(tài)2”。
分離方式C的RCS變化規(guī)律與分離方式B類似,也存在同樣的兩種“特殊”目標(biāo)狀態(tài)。不同的是分離方式C中極化參考平面xOz僅在特殊時刻才同時是錐體和柱體的對稱平面,因此分離方式C的交叉極化響應(yīng)不再是0。兩種特殊的狀態(tài)對應(yīng)共極化RCS的峰值,交叉極化的零點(diǎn)。
(2)極化比
從RCS均值的分析中可以看出,極化信息可以反映目標(biāo)分離的豐富信息。其中共極化與交叉極化響應(yīng)的幅度之比是目標(biāo)的一個重要極化特征。本小節(jié)主要分析了極化比隨目標(biāo)分離的變化過程。如圖7所示,后向散射滿足互易性,即SVH≈SHV;中段彈道目標(biāo)表面光滑不存在類似偶極子這種具有極化取向的結(jié)構(gòu),主極化通道近似相等,即SHH≈SVV。所以,極化比由SHH/SVH計算得到
圖8給出了錐柱組合體中段彈道目標(biāo)3種分離方式下極化比的統(tǒng)計結(jié)果。從圖8(a)可以看出分離方式A的極化比隨著目標(biāo)的分離成遞增趨勢,與圖7(a)中RCS的均值變化規(guī)律相吻合,極化比的增大主要得益于主極化RCS的增大,而交叉極化隨著目標(biāo)的分離近似不變;同樣的道理,圖8(b)的極化比變化規(guī)律也是與圖7(b)相對應(yīng)的。由于分離方式3中交叉極化響應(yīng)不再是0,所以極化比的下限小于前兩種分離方式20dB。在特殊狀態(tài)下,共極化的峰值對應(yīng)于交叉極化響應(yīng)的零點(diǎn),所以極化比形成“尖峰”,使得極化比的變化規(guī)律呈現(xiàn)獨(dú)特的“梳子型”。可以利用極化比的這種變化規(guī)律判斷中段彈道目標(biāo)分離事件是否發(fā)生。

圖7 錐柱組合體RCS均值隨著目標(biāo)分離的變化Fig.7 Mean variation of RCS for cone-cylinder-shaped targets with separation movements
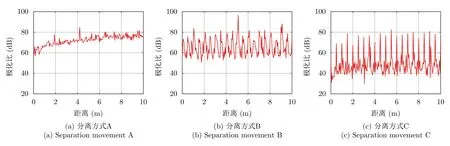
圖8 錐柱組合體極化比(SHH/SVH)隨著目標(biāo)分離的變化Fig.8 Polarization ratio variation of cone-cylinder-shaped targets with separation movements
(3)對稱角和特征角
根據(jù)Huynen經(jīng)典的雷達(dá)極化學(xué)理論,散射矩陣S可以對角化為
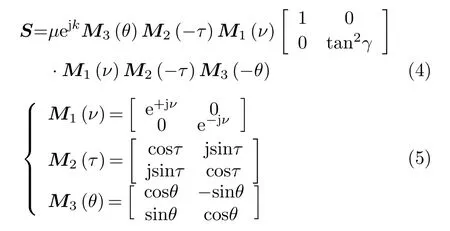
θ取向角,τ對稱角,ν跳躍角和γ特征角是Huynen目標(biāo)參數(shù)集。μ和k分別代表幅度和絕對相位,與目標(biāo)的極化散射特性無關(guān)。τ對稱角,ν跳躍角和γ特征角是與目標(biāo)繞雷達(dá)視線旋轉(zhuǎn)無關(guān)的物理量。τ反映了目標(biāo)的對稱性,當(dāng)τ=0時,目標(biāo)關(guān)于某個平面是對稱的;ν反映了目標(biāo)的奇偶次散射情況,ν=0對應(yīng)奇次散射機(jī)理,ν=π/4對應(yīng)偶次散射機(jī)理;γ衡量了目標(biāo)的“變極化”能力,γ=0時,目標(biāo)的散射波極化與入射波極化無關(guān)(例如偶極子結(jié)構(gòu));γ=π/4時,目標(biāo)的散射波極化與入射波極化相同。Huynen目標(biāo)參數(shù)集取值范圍為
經(jīng)過篩選,對稱角和特征角兩個極化特征隨目標(biāo)分離會出現(xiàn)有規(guī)律的變化,將每個分離時刻所有視線的對稱角和特征角進(jìn)行平均得到圖9和圖10。如圖9所示,3種分離方式下,特征角均接近π/4,反映了中段彈道目標(biāo)結(jié)構(gòu)簡單、表面光滑,不存在類似偶極子結(jié)構(gòu)等類型的部件。分離方式B和分離方式C中當(dāng)電磁波視線與柱體母線垂直時會發(fā)生鏡面反射,對于鏡面散射機(jī)理,特征角會接近π/4,因此在圖9(b)和圖9(c)中特征角隨目標(biāo)分離均出現(xiàn)離散的峰值。分離方式A僅作理論對比分析,實(shí)際場景中不會存在分離方式A的情況,更多是分離方式B和分離方式C的組合,因此利用特征角的這種“梳子型”變化規(guī)律可以判斷分離事件是否發(fā)生。
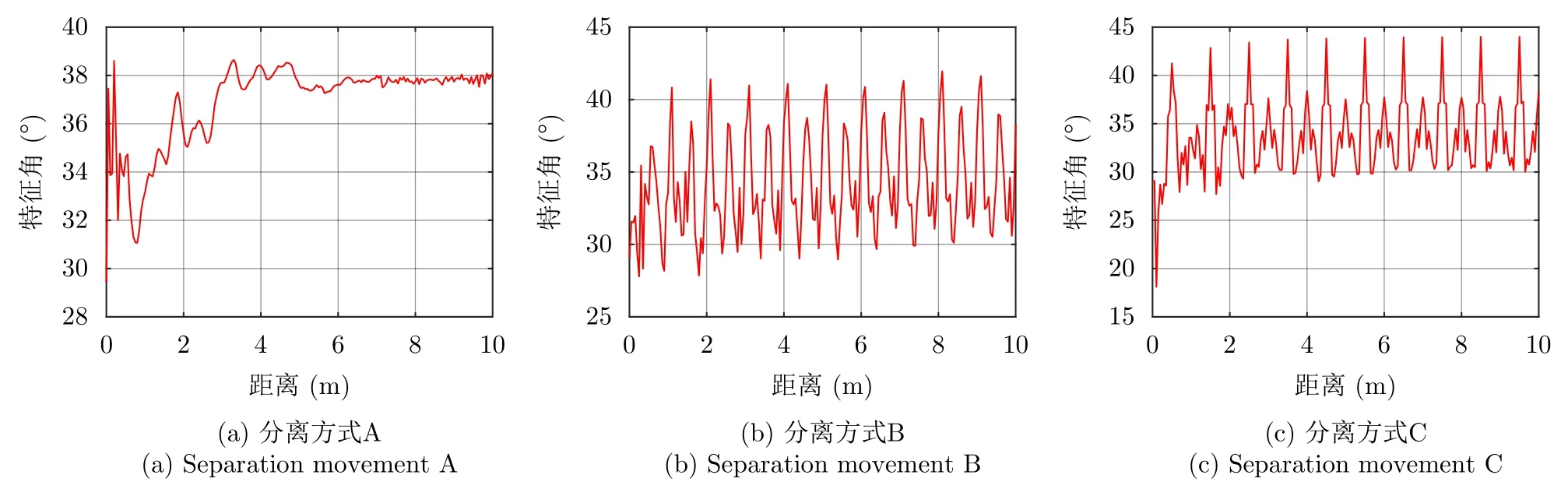
圖9 錐柱組合體特征角隨著目標(biāo)分離的變化Fig.9 Characterization angle variation of cone-cylinder-shaped targets with separation movements
對稱角反映了目標(biāo)的對稱性,對稱目標(biāo)對應(yīng)τ=0。錐柱組合體目標(biāo)是旋轉(zhuǎn)對稱的,因此,對稱角的理論值應(yīng)為0。分離過程中,分離方式A和分離方式B中雷達(dá)視線一直位于錐體和柱體的共同對稱平面內(nèi),因此提取的對稱角τ=0,如圖10(a)和圖10(b)所示。分離方式C中雷達(dá)視線僅在特殊時刻會同時位于錐體和柱體的對稱平面內(nèi),提取的對稱角τ開始偏離0。由于考慮空氣動力學(xué)等因素,中段彈道目標(biāo)通常會設(shè)計成近似旋轉(zhuǎn)對稱結(jié)構(gòu),因此分離前對稱角通常會接近0;當(dāng)分離事件發(fā)生后,母艙、誘餌等目標(biāo)缺乏姿態(tài)控制結(jié)構(gòu),分離產(chǎn)生的多目標(biāo)結(jié)構(gòu)很難滿足τ=0的條件,開始在0附近震蕩,可以當(dāng)作判斷分離事件發(fā)生的特征。
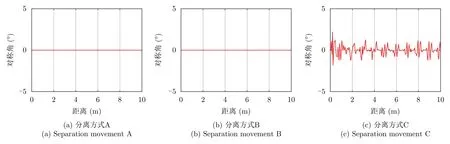
圖10 錐柱組合體對稱角隨著目標(biāo)分離的變化Fig.10 Symmetry angle variation of cone-cylinder-shaped targets with separation movement
為了驗(yàn)證所提出的分離事件特征在噪聲條件下的魯棒性,對入射角度(θ=15°)時空間目標(biāo)分離過程中的動態(tài)RCS數(shù)據(jù)添加噪聲,然后從噪聲背景下的RCS序列中提取分離事件特征,并進(jìn)一步比較噪聲背景下每項(xiàng)分離事件特征表征空間目標(biāo)分離事件能力的強(qiáng)弱。從空間目標(biāo)分離過程中的動態(tài)RCS分布可知,空間目標(biāo)RCS的起伏隨著視線角的變化是慢變的,所以僅選取θ范圍的中值15°進(jìn)行分析。
對入射角θ=15°,錐柱組合體分離過程中的動態(tài)RCS序列添加SNR=15dB的白噪聲,得到全極化RCS、極化比、特征角和對稱角如圖11—圖14所示。從圖11—圖14可以看出,噪聲對于提出的分離事件特征具有一定的影響。圖11中對應(yīng)于“狀態(tài)1”的RCS峰值由于數(shù)值較大,仍然保持了較大程度的起伏;對應(yīng)于“狀態(tài)2”的RCS峰值則淹沒在了噪聲中。圖12中對應(yīng)于分離方式B的極化比由于受到噪聲的影響不再像圖8中具有明顯的“梳子型”形狀特征,而變得雜亂。同樣,圖13中對應(yīng)于分離方式B和分離方式C的特征角的“梳子型”形狀特征也被破壞,只是隨著柱體的翻滾運(yùn)動而快速起伏變化。與前三者比較而言,對稱角表現(xiàn)得受噪聲影響較小,對應(yīng)于分離方式A和分離方式B仍然保持?jǐn)?shù)值0;分離方式C的對稱角較圖10中的結(jié)果起伏更加劇烈,更好地反映了其分離規(guī)律。
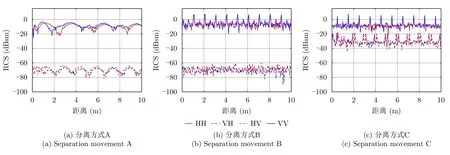
圖11 錐柱組合體RCS隨著目標(biāo)分離的變化(θ=15°)Fig.11 RCS variation of cone-cylinder-shaped targets with separation movements(θ=15°)
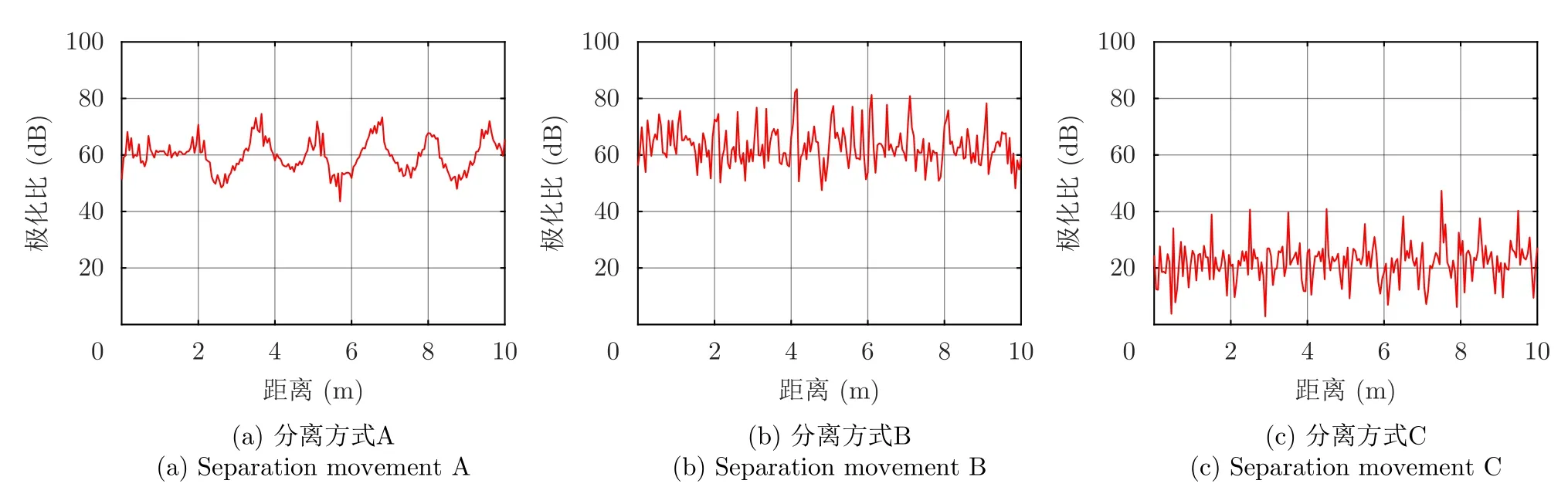
圖12 錐柱組合體極化比隨著目標(biāo)分離的變化(θ=15°)Fig.12 Polarization ratio variation of cone-cylinder-shaped targets with separation movements(θ=15°)
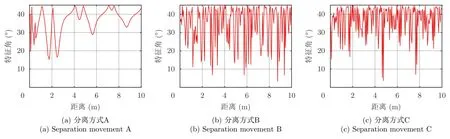
圖13 錐柱組合體特征角隨著目標(biāo)分離的變化(θ=15°)Fig.13 Characterization angle variation of cone-cylinder-shaped targets with separation movements(θ=15°)
為了定量衡量4種特征表征空間目標(biāo)分離特性的強(qiáng)弱,采用序列的7個指標(biāo)均值、極差、標(biāo)準(zhǔn)差、變異系數(shù)、平滑度、偏度系數(shù)、峰度系數(shù)[18]構(gòu)建分離事件特征序列的特征向量其中i表示分離方式i=A,B,C;p為分離事件特征索引,p={RCS、極化比、特征角、對稱角}。分別求得圖11—圖14中3種分離方式的4個分離事件特征序列的特征向量如表1所示。
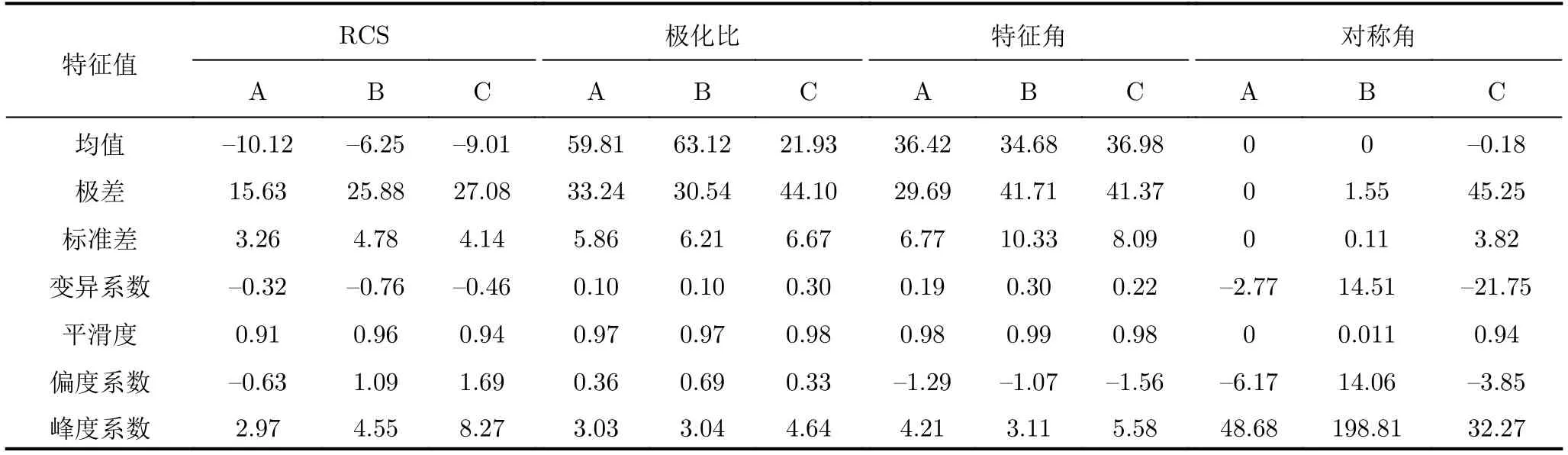
表1 空間目標(biāo)分離事件特征的定量化表征Tab.1 Separation accident features characterization for space targets
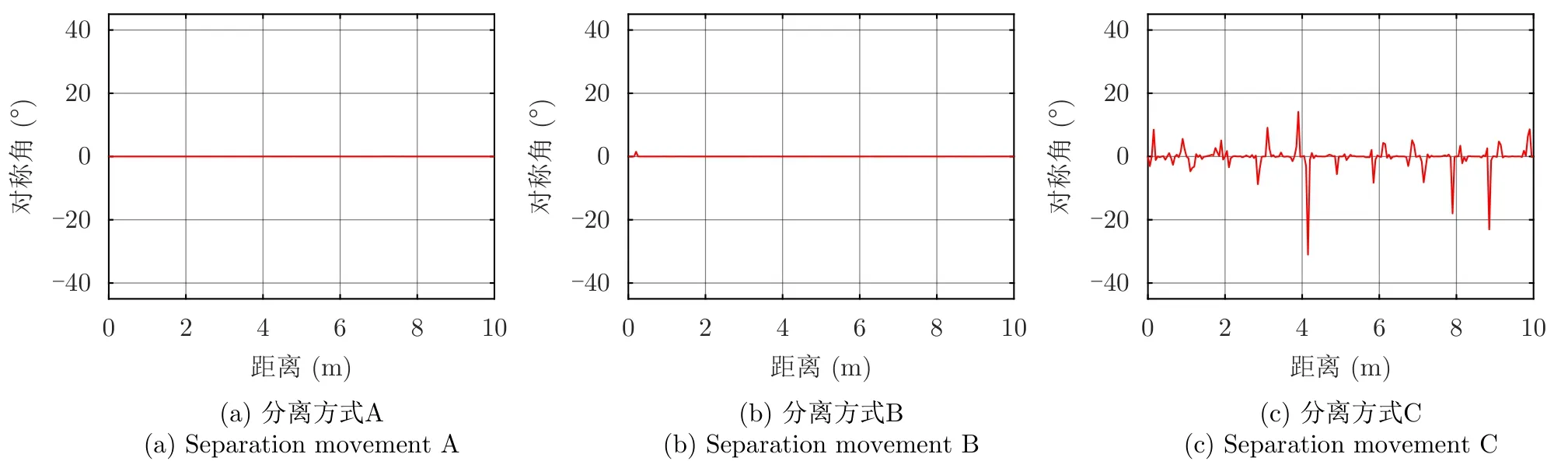
圖14 錐柱組合體對稱角隨著目標(biāo)分離的變化(θ=15°)Fig.14 Symmetry angle variation of cone-cylinder-shaped targets with separation movements(θ=15°)
利用式(7)分別求得用每一個分離事件特征表征3種分離方式時兩兩之間的“隔離度”,如表2所示。從表2可以看出,任何一個分離事件特征都難以將3種分離方式完全劃分清楚。例如,由極化比隔離度可以看出,利用極化比特征可以很好地區(qū)分分離方式C和分離方式A或B,卻難以區(qū)分分離方式A和B;利用主極化RCS序列可以很好地區(qū)分分離方式A和分離方式B或C,卻對區(qū)分分離方式B和分離方式C的能力較弱。這說明對于判斷空間目標(biāo)分離事件的發(fā)生,不能依賴單一的特征,需要綜合利用多種特征。由于引入噪聲的影響,圖13中的特征角序列呈現(xiàn)的“梳子型”規(guī)律發(fā)生較大變化,對于表征3種分離方式的差異性能力較弱。相比之下,噪聲背景下的對稱角仍然保持未加噪聲時的變化規(guī)律,因此對于區(qū)分分離方式C和分離方式A或B的能力較強(qiáng)。
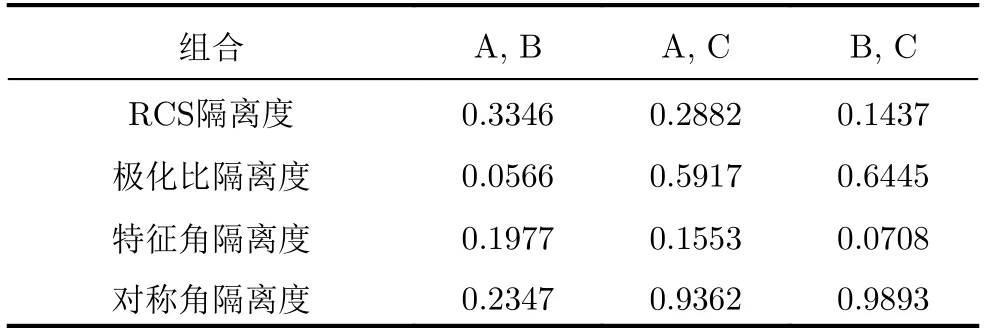
表2 不同分離方式之間的隔離度Tab.2 Isolation measurement between separation movements characterization features
4 結(jié)論
本文重點(diǎn)關(guān)注了中段彈道目標(biāo)分離階段前期,多個目標(biāo)之間在分離過程中的電磁耦合散射特性分析。在此基礎(chǔ)上,分析了優(yōu)選的RCS均值、極化比、特征角和對稱角4個特征量在目標(biāo)分離過程中的動態(tài)變化,為判斷中段彈道目標(biāo)分離事件是否發(fā)生提供依據(jù)。目前,該研究關(guān)注的僅是早期預(yù)警雷達(dá)對中段彈道目標(biāo)進(jìn)行預(yù)警探測時的窄帶場景,后續(xù)研究會進(jìn)一步討論寬帶情況下中段彈道目標(biāo)分離過程的動態(tài)散射特性,并進(jìn)一步豐富與分離事件關(guān)系緊密的特征量。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2022年3期)2022-04-26 14:04:16
數(shù)學(xué)年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學(xué)學(xué)報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(xué)(2019年8期)2019-11-25 01:38:14
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:38