三維多點交會點位空間分布優化與精度分析
2021-07-03 07:00:22丁克良靳婷婷蔣志強陳昊旻
光學精密工程 2021年4期
關鍵詞:測量
丁克良,靳婷婷,蔣志強,李 甜,陳昊旻
(1.北京建筑大學 測繪與城市空間信息學院,北京102616;2.中國科學院 上海高等研究院,上海201210;3.北京普達迪泰科技有限公司,北京100083)
1 引言
隨著大型科學工程的不斷發展,大尺寸精密工程三維控制網的測量精度越來越高[1-2]。為了保證布設的點位可以完全控制建筑的施工和移動模塊的安裝,測量點數量要達到數萬個,而常用的三點交會法已不能滿足大規模復雜工程的測量精度要求,需要對測量點和測站進行加密處理。多點交會法卻可以選取有利的點位位置,有效地提高點位交會精度,從而提高整體網型的測量精度。
近年來,國內外研究人員就空間三維坐標測量精度進行了多方面的研究。張皓琳等根據最小二乘不等精度估計理論,分析得出坐標轉換精度主要受測量精度及點位幾何分布的影響[3]。劉湛基等提出結合最小二乘法的RANSAC快速轉換算法構建公共點擬合變換模型,再利用評判模型選定最優的公共點分布結構[4]。李輝等分析了激光跟蹤儀受公共點分布影響的系統誤差,構建了轉站參數誤差補償模型,提高了多基站轉站精度[5]。王強和Bergen等利用精度因子(Dilu?tion Of Precision,DOP)分別研究了到達角交匯定位系統(Activity On Arrow,AOA)基于距離測量和角度測量時儀器的最佳布設位置和數量[6-7]。熊芝等比較分析了基于空間測量定位系統(workshop Measurement Positioning System,w MPS)網絡布局中幾種經典測站布局方式對測量精度的影響,獲得了最佳站位分布結構[8]。周娜等根據激光雷達及iGPS系統的測量特性,對飛機數字化測量網絡的布站進行了優化設計,有效提高了測量精度[9]。賈慶蓮等基于三維幾何分布 模 型(Geometrical Dilution of Precision,GDOP)分析了多個布站模式下周視搜索系統對目標的定位誤差及分布規律,選定了最佳的布站模式[10]。Konchenko等通過DOP和圓誤差概率(Circular Error Probability,CEP)優化了機場多邊監測系統的儀器布設位置[11]。范百興等通過構建激光干涉測量三維點坐標的幾何精度因子(Position Dilution of Precision,PDOP)模型,有效避免了測量點及測站的不利測量位置[12-14]。此外,研究人員還針對全球導航定位系統中衛星分布的空間三維坐標測量精度進行了研究[15-17]。所以,對多種測量方法的點位空間分布結構的研究,是提高空間三維坐標測量精度的重點。
由于測量點的數量和空間位置分布是影響測量精度的主要因素,本文基于激光跟蹤儀測量系統,在分析三維平差模型的基礎上,對測量點數據進行量化分析,構建了加權精度因子模型(Weighted Dilution Of Precision,w DOP),通過多方向多距離的點位交會插點精度實驗分析,選取有利的點位位置,獲得了滿意的測量精度。
2 多點交會的計算方法
2.1 函數模型
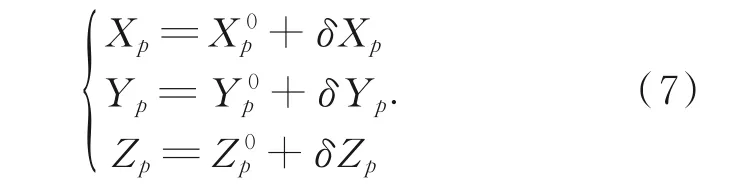
如圖1所示,多點交會的觀測值為待定點P點到n個測量點的斜距S1~Sn,天頂距β1~βn,水平方向α1~αn,觀測值個數為3n,必要觀測數為6。其中n為測量點個數,測量點T i的坐標為(X i,Y i,Zi),假 定 待 定 點P改 正 坐 標 為(X p,Y p,Zp),近似坐標為(X0p,Y0p,Z0p),近似坐標的改正數為(δXp,δY p,δZp)。經推導,各觀測值的誤差方程如下[18-19]:
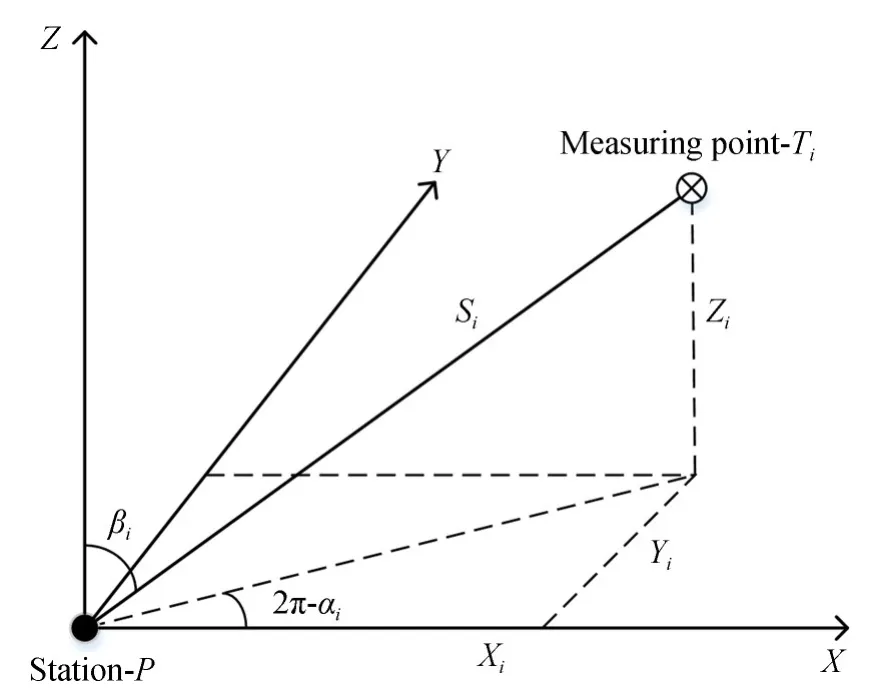
圖1 激光跟蹤儀測量原理Fig.1 Measurement principle of laser tracker
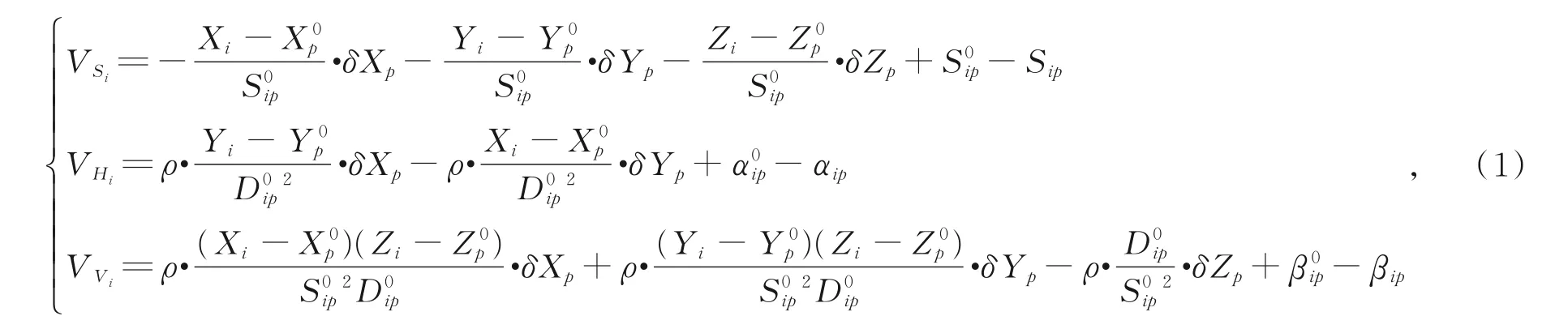
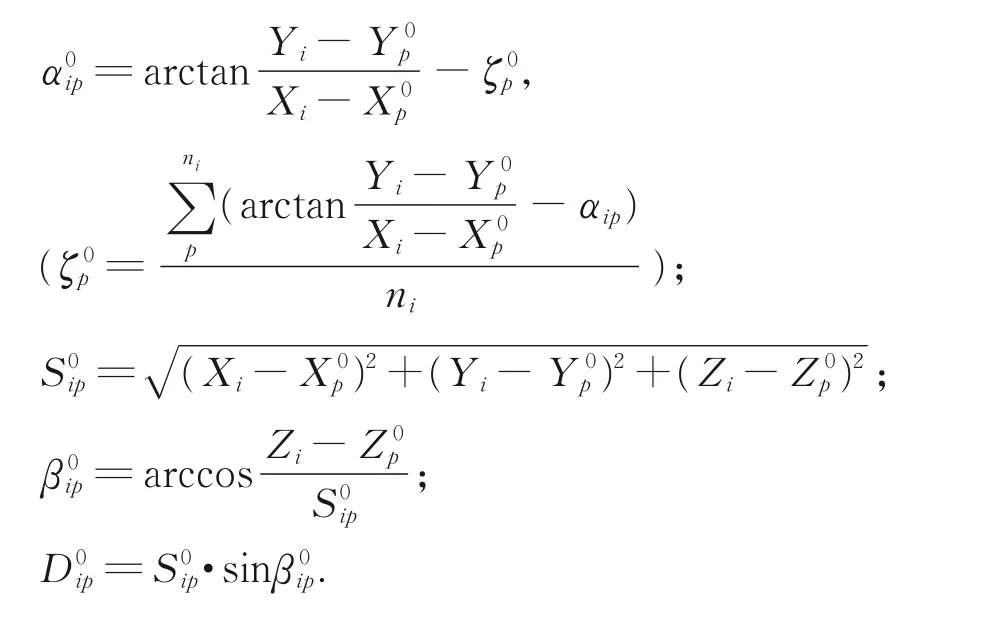
上述誤差方程式表達成矩陣形式為:

其中:

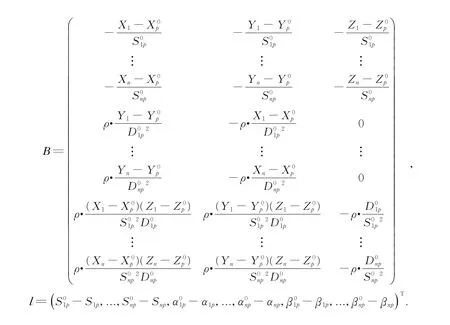
計算B,l矩陣時,ρ=206265。
2.2 觀測值的權矩陣確定
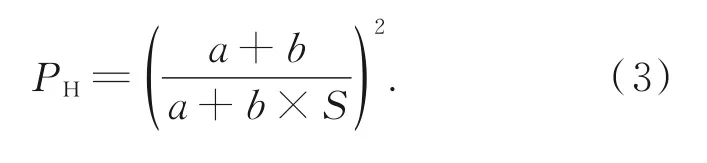
以激光跟蹤儀的測量數據為例,激光跟蹤儀的測角誤差隨著測量距離的增大而增大[14],其測角的標稱方式一般采用±(a+b×S)的形式,其中a為固定誤差,單位為μm,b為比例誤差,單位為μm/m。以AT 960激光跟蹤儀為例,其角度標稱精 度 為±(15μm+6μm/m)。因 此,角 度權為[20]:
激光跟蹤儀的天頂距測量精度與水平角的標稱值相同,但實際測試表明,激光跟蹤儀的一測回水平方向中誤差要小于一測回垂直方向中誤差,因此在平差解算時,可按照如下原則賦權[21]:

其中k為小于1的系數,參考AT 960激光跟蹤儀的測角精度檢測結果,k一般取0.7~0.8比較合適。
激光跟蹤儀的距離觀測值的權可以表示為:
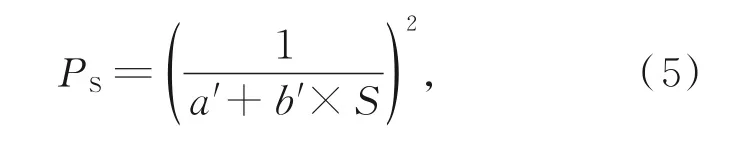
其中:a′為測距固定誤差,b′為測距的比例誤差,但是激光跟蹤儀的測距固定誤差一般都很小,因此其標稱誤差一般都忽略固定誤差,只給出比例誤差。AT 960的距離標稱精度為±0.5μm/m。
2.3 加權精度因子構建
由誤差方程及觀測值權陣列出法方程并解算得到未知數[19,22]:

則待定點坐標為:
單位權中誤差估值為:

式中:n為觀測量個數,t為必要觀測量個數。
待定點P點坐標改正數的協因數陣為:
則待定點的點位中誤差為:

系數矩陣是測站點和測量點空間位置的反映,則加權精度因子的w DOP模型如下[16,23-24]:
其中:w PDOP為加權空間位置的精度因子,w H?DOP為加權水平位置的精度因子,w VDOP為加權高程的精度因子。
3 實驗
3.1 實驗方案
以3個測量點T1,T2,T3及測站P為基準構建四面體,由于激光跟蹤儀測角誤差會隨距離的增大而增大,則控制水平角和天頂距固定的情況下,在P和T3的測線上,移動T3的位置,讓T3方向上的距離成倍增加,分別構建T3-0~T3-15,共16個點位置,T1,T2點保持不變,如圖2所示。
圖2 點位分布Fig.2 Point distribution
對變化的四面體進行連續測量和精度計算,XOY,YOZ,ZOX面內w PDOP值的分布情況如圖3所示。從圖3可以看出,在3個平面內,四面體的w PDOP值均隨著離測站點距離的增加而增加。所以在水平角和天頂距相當的情況下,為保證點位交會精度,測量點到測站的距離應盡量短。
圖3 XOY,YOZ,ZOX三面內的w PDOP等值線分布Fig.3 Contour distribution of w PDOP value in XOY,YOZ and ZOX planes
以某工程為例,根據已知測量點坐標,自由布設測站,以測站為原點建立坐標系,對測量點進行測量,實際布設情況如圖4所示。為保證點位交會精度,剔除水平角與天頂距近似但距離較長的點,剩余點位分布如圖5所示。
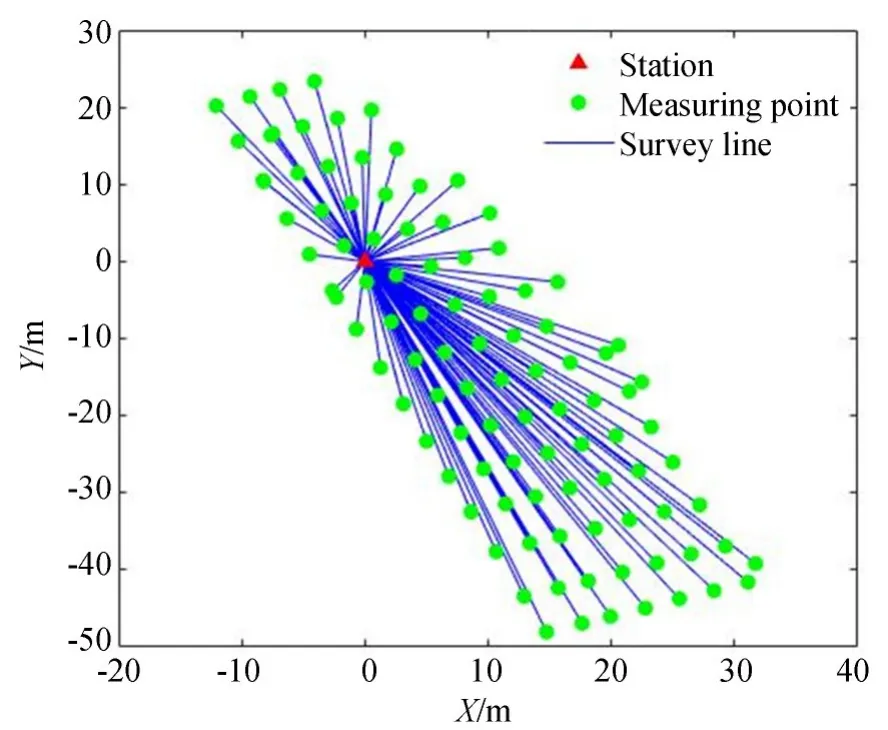
圖4 原始點位分布Fig.4 Original point distribution
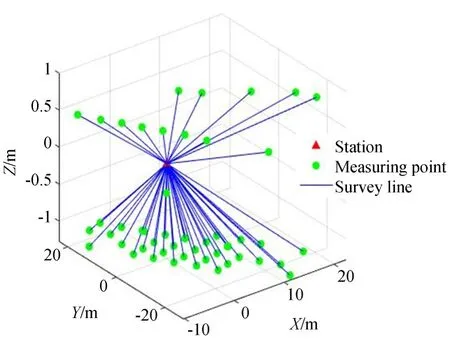
圖5 抽稀后點位分布Fig.5 Point distribution after thinning
以每3個測量點為一組,對所有測量點進行排列組合,循環計算,提取其w PDOP,w VDOP,w HDOP及點位交會中誤差Mp。通過實驗證明w PDOP與Mp的數值分布情況基本一致,相關性達0.67,具體情況如圖6所示。
w PDOP與w VDOP,w HDOP的相關性分別為0.99和0.6。從圖7(a)可知,w PDOP與w V?DOP不僅具有良好的相關性,且w VDOP與w P?DOP的數值基本一致;w PDOP與w HDOP的相關性明顯低于w PDOP與w VDOP的相關性,且如圖7(b)所示數值上w HDOP遠小于w PDOP,所以在考慮測量點的幾何分布情況時,主要考慮高程方向的影響因素,即可得到較好的測量點分布結構。
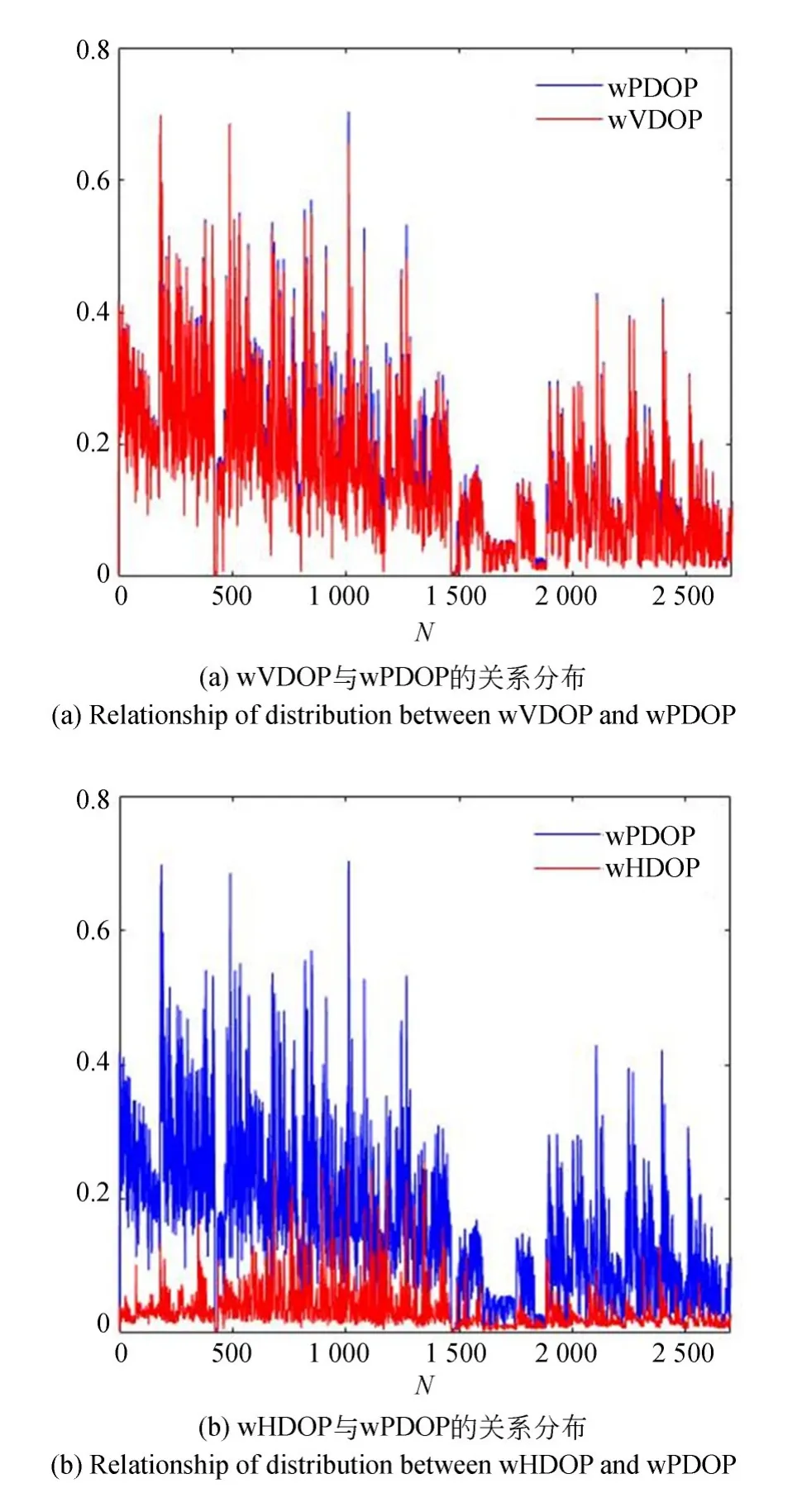
圖7 w HDOP,w VDOP與w PDOP的關系Fig.7 Relationship between w HDOP,w VDOP and w P?DOP
w VDOP主要受天頂距和距離的影響,同組合中測量點間最大天頂距差值與w VDOP負相關,相關性達-0.60,同組合中最短距離與w V?DOP值呈正相關,相關性高達0.87。具體情況如圖8所示,距離相同時,隨著天頂距差值的不斷增大,w VDOP值逐漸減小;天頂距差值相同時,w VDOP隨著距離的減小而減小。所以在選擇測量點時,盡量選擇天頂距差值較大,測量距離較小的點組合進行點位交會,可以有效地提高點位交會精度。
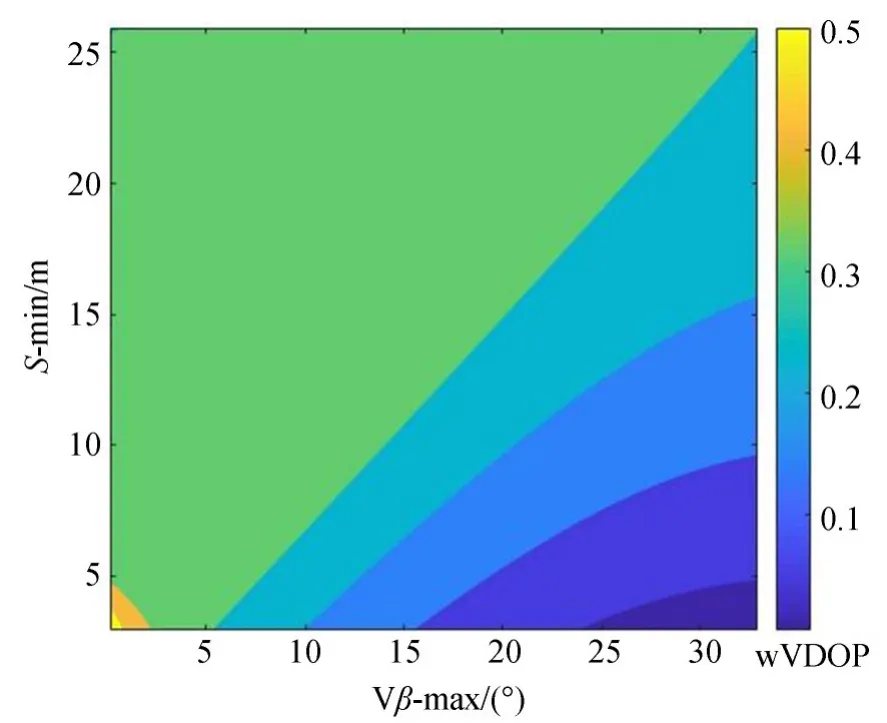
圖8 距離-天頂距差值的w VDOP等值線分布Fig.8 Contour distribution of w VDOP for distance-ze?nith distance difference
3.2 點數及空間分布對精度影響分析
理論上,對空間點進行三維交會測量時,測量點數與測量點分布都直接影響w PDOP值。選擇上述測量點較為分散的四面體組合作為基準,增加一測量點,分別計算新增測量點增加在已有四面體內部、面上、外部(增加/不增加天頂距最大差值)時對點位交會精度的影響,然后依次在4,5,…,8多面體的4個位置分別增加測量點,從而得到點位交會精度,如圖9所示。整體而言,當測量點增加在多面體內部時,w PDOP值及點位交會中誤差Mp最小;隨著測量點數的增加,w P?DOP值與點位交會中誤差都逐漸減小。實驗證明:隨著測量點的增加,點位交會精度逐漸提高;在已有多面體的內部增加測量點能更好地提高多點交會精度。
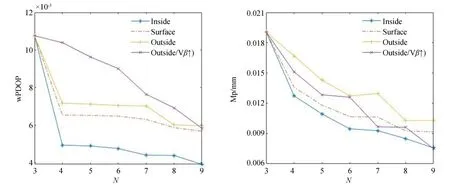
圖9 多面體新增點位置與精度關系Fig.9 Relationship between accuracy and position of new points in polyhedron
在已知四面體內增加測量點,控制測量點的水平角和天頂距近似相同,增加斜距,分析結果如圖10(a)所示,隨著距離的增加,w PDOP值隨之下降;控制測量點的距離和天頂距近似相同,改變水平角,分析結果如圖10(b)所示,w PDOP值與水平角的分布沒有直接關系;控制測量點的距離和水平角近似相同,改變天頂距,分析結果如圖10(c)所示,w PDOP值隨著天頂距的增大而減小。實驗證明:在多面體內增加測量點時,在水平角一定的情況下,應盡可能地減小測量點到測站的距離、增加測量點的天頂距,從而提高點位交會精度。
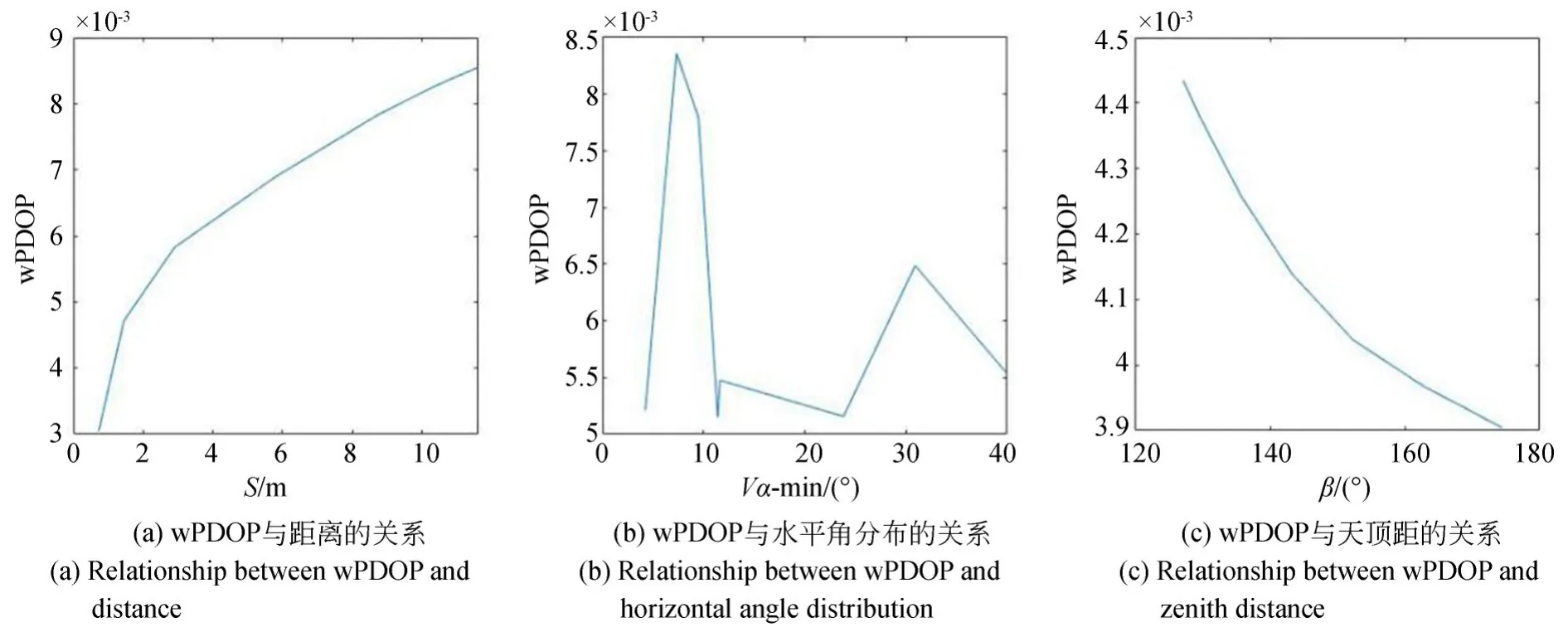
圖10 w PDOP與內插點位置的關系Fig.10 Relationship between w PDOP and interpolation point position
在已知四面體內依次插入1,2,…,16個點,16個點分別進行隨機ξ排序,按照水平角α、天頂距β、斜距S大小降序排列,對4種排序數據進行分析,分析結果如圖11所示。w PDOP值、w H?DOP值、w VDOP值及點位交會中誤差Mp均會隨著測量點數的增加而減小,在5個測量點以后數值的減小幅度逐漸降低,6個測量點時均可得到一個較穩定數值。所以,在點位交會中,使用6個點進行交會計算,即可得到較高、較穩定的點位交會精度。
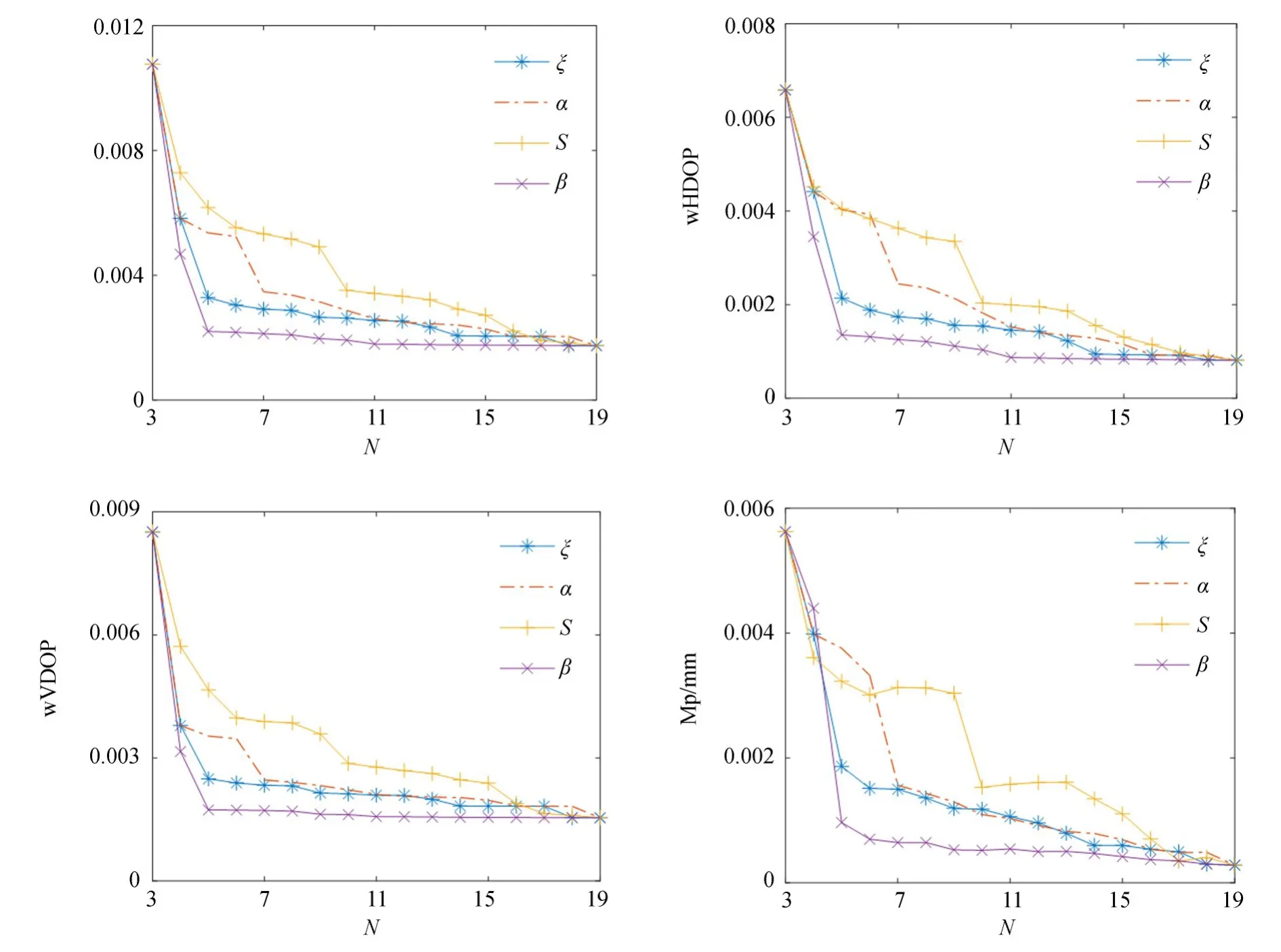
圖11 多測量點交會精度分析Fig.11 Accuracy analysis of multi-measurement point intersection
4 結論
由于測站的點位交會精度主要受測量點空間幾何分布的影響,本文構建了基于激光跟蹤儀測量系統的w DOP解算模型,從測量點在水平面和高程方向的點位分布、測量點數量對空間點位交會精度的影響進行了比較分析。理論分析和實驗表明,三點交會測量時,測站交會精度主要受點位高程方向的分布影響,高程精度因子w VDOP與空間位置精度因子w P?DOP值的相關性高達0.99,交會精度隨著測量點間最大天頂距差值的增大和最短距離的減小而提高。當新增測量點在原有四面體之內時,對減小測量點的w PDOP值具有顯著作用,且新增測量點的距離越短、天頂距越大,點位交會精度越高。增加測量點可以有效提高點位交會精度,當測量點達到6個時,點位交會精度可達到一個較穩定、較高的狀態;隨著測量點的增加,點位精度提高的幅度逐漸減小。
根據本文構建的幾何精度因子模型w DOP值的空間分布影響因素,可以指導大尺度精密工程三維控制網布設和測量,優化最佳測站位置,最大限度地提高點位交會精度。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00