高分多模衛(wèi)星測(cè)控分系統(tǒng)設(shè)計(jì)與驗(yàn)證
2021-07-03 02:33:36汪精華梁杰楊文濤王躍王闊
航天器工程 2021年3期
汪精華 梁杰 楊文濤 王躍 王闊
(1 中國(guó)空間技術(shù)研究院遙感衛(wèi)星總體部,北京 100094)(2 北京空間飛行器總體設(shè)計(jì)部,北京 100094)
高分多模衛(wèi)星(GFDM-1)是我國(guó)空間基礎(chǔ)設(shè)施“十三五”首批立項(xiàng)的科研星,同時(shí)也是中型敏捷遙感衛(wèi)星公用平臺(tái)(ZY2000 Remote Sensing Satellite Platform)的驗(yàn)證星,測(cè)控分系統(tǒng)的多項(xiàng)技術(shù)指標(biāo)得到了突破。當(dāng)前低軌遙感衛(wèi)星測(cè)控分系統(tǒng)的上行遙控碼速率為2000~4000 bit/s[1-2],下行及中繼返向遙測(cè)碼速率為4096~8192 bit/s[1-2],定位定軌能力多采用單天線方式,而高分多模衛(wèi)星在提升長(zhǎng)壽命高可靠方面的遙測(cè)遙控設(shè)計(jì)、滿足大角度敏捷機(jī)動(dòng)要求下的定位定軌方式均進(jìn)行了創(chuàng)新與升級(jí)。
本文重點(diǎn)針對(duì)兩點(diǎn)開展論述。S測(cè)控子系統(tǒng)采用了統(tǒng)一S頻段測(cè)控(USB)+擴(kuò)頻的異構(gòu)設(shè)計(jì),提升了星地測(cè)控的可靠度,同時(shí)支持對(duì)地測(cè)控與對(duì)中繼測(cè)控功能,實(shí)現(xiàn)全球測(cè)控,優(yōu)化了測(cè)控鏈路,將遙控碼速率提升到了8000 bit/s,遙測(cè)碼速率提升到了16 384 bit/s。導(dǎo)航子系統(tǒng)采用了雙天線同時(shí)參與解算方法,同時(shí)導(dǎo)航天線傾斜安裝15°,有效增加了導(dǎo)航信號(hào)接收空域,保證敏捷機(jī)動(dòng)過程中的連續(xù)定位;導(dǎo)航子系統(tǒng)還支持雙頻雙模,有效提高事后精密定軌精度,并支持北斗導(dǎo)航系統(tǒng)(BD)的高精度在軌應(yīng)用。
1 測(cè)控分系統(tǒng)設(shè)計(jì)
衛(wèi)星測(cè)控分系統(tǒng)由導(dǎo)航子系統(tǒng)及S頻段測(cè)控子系統(tǒng)組成[3-5]。導(dǎo)航子系統(tǒng)在軌實(shí)時(shí)接收GPS或者BD導(dǎo)航信號(hào)完成星上實(shí)時(shí)定軌,同時(shí)將原始觀測(cè)量數(shù)據(jù)下傳地面用于地面事后精密定軌處理[6];S頻段測(cè)控子系統(tǒng)為衛(wèi)星和地面測(cè)控站之間、衛(wèi)星與中繼衛(wèi)星之間提供S頻段射頻通道,同時(shí)完成星地測(cè)距任務(wù),S頻段測(cè)控子系統(tǒng)功能包括對(duì)地USB測(cè)控、對(duì)地?cái)U(kuò)頻測(cè)控和中繼擴(kuò)頻測(cè)控。
1.1 雙天線導(dǎo)航定位定軌設(shè)計(jì)
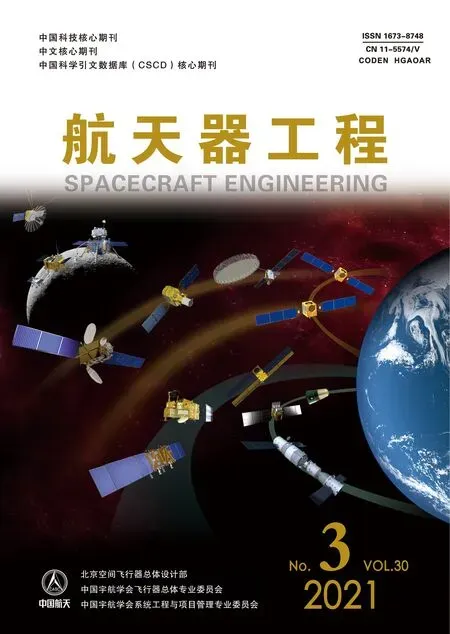
導(dǎo)航子系統(tǒng)由2副導(dǎo)航天線、2臺(tái)導(dǎo)航前置放大器、1臺(tái)功分器和2臺(tái)導(dǎo)航定位接收機(jī)組成[7],導(dǎo)航子系統(tǒng)采用雙天線雙頻雙模設(shè)計(jì)方案。導(dǎo)航子系統(tǒng)組成如圖1所示。
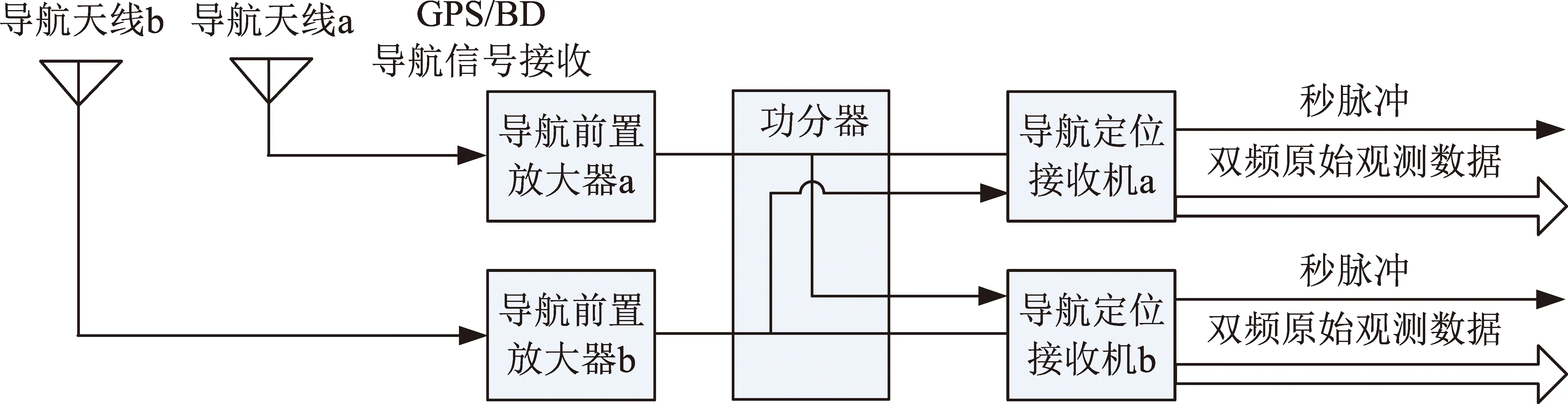
圖1 導(dǎo)航子系統(tǒng)組成Fig.1 Navigation system composition
考慮到敏捷衛(wèi)星姿態(tài)機(jī)動(dòng)速度快以及姿態(tài)機(jī)動(dòng)角度大的特點(diǎn),高分多模衛(wèi)星導(dǎo)航子系統(tǒng)重點(diǎn)解決雙天線導(dǎo)航下接收星數(shù)與觀測(cè)質(zhì)量以及姿態(tài)快速機(jī)動(dòng)導(dǎo)航接收機(jī)環(huán)路穩(wěn)定鎖定的設(shè)計(jì)問題。
1)雙天線導(dǎo)航定位定軌設(shè)計(jì)
導(dǎo)航天線在衛(wèi)星上的安裝方式如圖2所示,2副導(dǎo)航天線均斜裝15°,由于2副天線的導(dǎo)航信號(hào)同時(shí)參與解算,相對(duì)于傳統(tǒng)單天線方式,系統(tǒng)增加了30°的接收空域。通過仿真可知,雙天線下的平均接收星數(shù)比單天線下增加1~2顆,在姿態(tài)機(jī)動(dòng)情況下某天線完全被地球遮擋情況下,另一副天線仍可滿足4顆星以上的最低定位要求。

圖2 導(dǎo)航天線安裝示意圖Fig.2 Installation diagram of navigation antenna
雙天線處理中相位中心的處理包括了兩種方法,當(dāng)單個(gè)天線的接收星數(shù)大于4顆,接收機(jī)將根據(jù)觀測(cè)質(zhì)量選擇某天線的觀測(cè)量進(jìn)行定位定軌處理,并將定位定軌結(jié)果從天線的相位中心折算到衛(wèi)星質(zhì)心;當(dāng)姿態(tài)快速大角度機(jī)動(dòng)時(shí),2副天線的接收星數(shù)均不滿足4顆,則接收機(jī)自動(dòng)切換到雙天線同時(shí)處理模式,接收機(jī)進(jìn)行導(dǎo)航衛(wèi)星信噪比剔除并進(jìn)行聯(lián)合定軌解算,并將定位定軌結(jié)果從雙天線的連線中心折算到衛(wèi)星質(zhì)心。衛(wèi)星由于燃料消耗,結(jié)構(gòu)變形導(dǎo)致的衛(wèi)星質(zhì)心的漂移,這些參數(shù)可通過參數(shù)上注的方式提供給導(dǎo)航定位接收機(jī),接收機(jī)可在軌進(jìn)行參數(shù)更改并完成處理。
2)姿態(tài)快速機(jī)動(dòng)GPS接收機(jī)環(huán)路設(shè)計(jì)
導(dǎo)航接收機(jī)的載波跟蹤環(huán)路由載波檢測(cè)積分器、載波環(huán)鑒別器、載波環(huán)濾波器構(gòu)成。在設(shè)計(jì)時(shí),考慮容忍動(dòng)態(tài)應(yīng)力,鑒別器應(yīng)為鎖頻環(huán)(FLL),載波環(huán)濾波帶寬應(yīng)該較寬。然而,為了載波測(cè)量準(zhǔn)確,鑒別器應(yīng)該為鎖相環(huán)(PLL),載波環(huán)環(huán)路濾波器噪聲帶寬應(yīng)該較窄。因此載波跟蹤環(huán)設(shè)計(jì)由鎖頻環(huán)(FLL)與科斯塔斯環(huán)(Costas PLL)構(gòu)成,先用FLL和寬帶的環(huán)路濾波器將載波跟蹤環(huán)路閉合起來(lái),并轉(zhuǎn)移到Costas PLL狀態(tài),并在動(dòng)態(tài)允許的情況下使其載波跟蹤帶寬盡量窄,同時(shí)適應(yīng)快速姿態(tài)機(jī)動(dòng)下環(huán)路鎖定能力。導(dǎo)航接收機(jī)載波環(huán)路濾波器采用的是三階環(huán),可以穩(wěn)定跟蹤速度和加速度,目前環(huán)路的加速度跟蹤門限是5gn。
導(dǎo)航接收機(jī)碼跟蹤環(huán)產(chǎn)生超前、滯后2個(gè)不同相位的復(fù)現(xiàn)碼,經(jīng)預(yù)檢測(cè)積分后,通過碼環(huán)鑒別器與碼環(huán)濾波器控制碼數(shù)控振蕩器(NCO),使接收機(jī)在碼域精確跟蹤衛(wèi)星信號(hào),由碼相位獲得偽距。載波環(huán)的輸出對(duì)碼環(huán)提供多普勒輔助,載波環(huán)輔助實(shí)際上去掉了碼環(huán)所有在視線方向上的動(dòng)態(tài),因此碼環(huán)濾波器的級(jí)數(shù)可以做的比較低,雙頻導(dǎo)航接收機(jī)采用2階濾波器。目前環(huán)路的加速度跟蹤門限是5gn。
考慮到目前整星的加速度不超過5gn,因此導(dǎo)航接收機(jī)在姿態(tài)機(jī)動(dòng)過程中不會(huì)失鎖,可以保證姿態(tài)機(jī)動(dòng)過程的連續(xù)定位定軌。
1.2 S頻段異構(gòu)遙控遙測(cè)設(shè)計(jì)
S頻段測(cè)控子系統(tǒng)由2臺(tái)USB應(yīng)答機(jī)、1臺(tái)擴(kuò)頻應(yīng)答機(jī)、1臺(tái)功率放大器、2副寬波束測(cè)控天線、2副窄波束測(cè)控天線、1副中繼接收天線、1副中繼發(fā)射天線、2個(gè)混合接頭以及相應(yīng)的高頻電纜組成,具體組成見圖3所示。

圖3 S頻段測(cè)控子系統(tǒng)組成Fig.3 S-bamd TTCS system composition
S頻段測(cè)控子系統(tǒng)采用如下技術(shù)設(shè)計(jì)。
(1)異構(gòu)設(shè)計(jì),提升系統(tǒng)可靠度及應(yīng)用手段;單純USB測(cè)控的8年可靠度指標(biāo)為0.99/8年,采用了異構(gòu)架構(gòu)的S頻段測(cè)控子系統(tǒng)的可靠度指標(biāo)為0.999 7/8年,在傳統(tǒng)USB測(cè)控的基礎(chǔ)上進(jìn)一步增加分系統(tǒng)的可靠度指標(biāo),同時(shí),多種應(yīng)用手段冷熱備份設(shè)計(jì),可支持測(cè)控分系統(tǒng)8年不間斷連續(xù)可靠在軌工作;中繼測(cè)控的應(yīng)用提升了民用衛(wèi)星全球測(cè)控能力,結(jié)合衛(wèi)星敏捷機(jī)動(dòng)的特點(diǎn),完成任意時(shí)間對(duì)于全球熱點(diǎn)區(qū)域成像任務(wù)的快速分發(fā)。
(2)軍民融合,提升系統(tǒng)抗干擾能力;高分多模衛(wèi)星是第一顆采用擴(kuò)頻對(duì)地測(cè)控體制的民用衛(wèi)星,具有同頻異碼15 dB,單載波15 dB的抗干擾能力,結(jié)合衛(wèi)星敏捷機(jī)動(dòng)的軍用應(yīng)用能力,可切換到擴(kuò)頻測(cè)控通道滿足軍用抗干擾需求。
(3)高性能指標(biāo)及新一代產(chǎn)品,完成中型敏捷平臺(tái)先進(jìn)單機(jī)產(chǎn)品驗(yàn)證;高分多模測(cè)控分系統(tǒng)的上行遙控支持8000 bit/s,下行遙測(cè)支持16 384 bit/s,均為低軌遙感衛(wèi)星的最高能力,且擴(kuò)頻應(yīng)答機(jī)、USB應(yīng)答機(jī)等關(guān)鍵單機(jī)均為中型敏捷遙感衛(wèi)星公用平臺(tái)研制開發(fā)的小型化升級(jí)換代單機(jī)產(chǎn)品,需要在高分多模衛(wèi)星項(xiàng)目中開展試驗(yàn)驗(yàn)證。
2 實(shí)驗(yàn)室仿真驗(yàn)證
高分多模衛(wèi)星安排了導(dǎo)航子系統(tǒng)環(huán)境遮擋物理仿真試驗(yàn)對(duì)于雙天線導(dǎo)航精度進(jìn)行了試驗(yàn)驗(yàn)證,同時(shí)考慮了太陽(yáng)翼不同角度下的影響,遮擋情況下采用雙天線組合進(jìn)行定軌,包括了物理仿真內(nèi)場(chǎng)試驗(yàn),物理仿真外場(chǎng)試驗(yàn)以及遮擋分析與事后精密定軌驗(yàn)證軟件。
物理仿真內(nèi)場(chǎng)試驗(yàn)主要完成以下內(nèi)容:①有無(wú)太陽(yáng)翼下的觀測(cè)量精度對(duì)比;②尋找太陽(yáng)翼作用下的最差觀測(cè)量的太陽(yáng)翼角度,并將該角度作為最差狀態(tài)進(jìn)行實(shí)時(shí)定軌精度試驗(yàn)的測(cè)試角度;③建立太陽(yáng)翼、整星反射、折射及多徑綜合效應(yīng)影響下的偽距誤差模型以及載波相位測(cè)量誤差模型,將該誤差增加到導(dǎo)航動(dòng)態(tài)仿真模塊輸出的原始觀測(cè)數(shù)據(jù)中,用于定軌指標(biāo)的分析評(píng)估;④導(dǎo)航天線方向圖及相位中心測(cè)試,得到方向圖及相位中心作為導(dǎo)航動(dòng)態(tài)仿真模塊的設(shè)計(jì)輸入,如圖4,圖5所示。
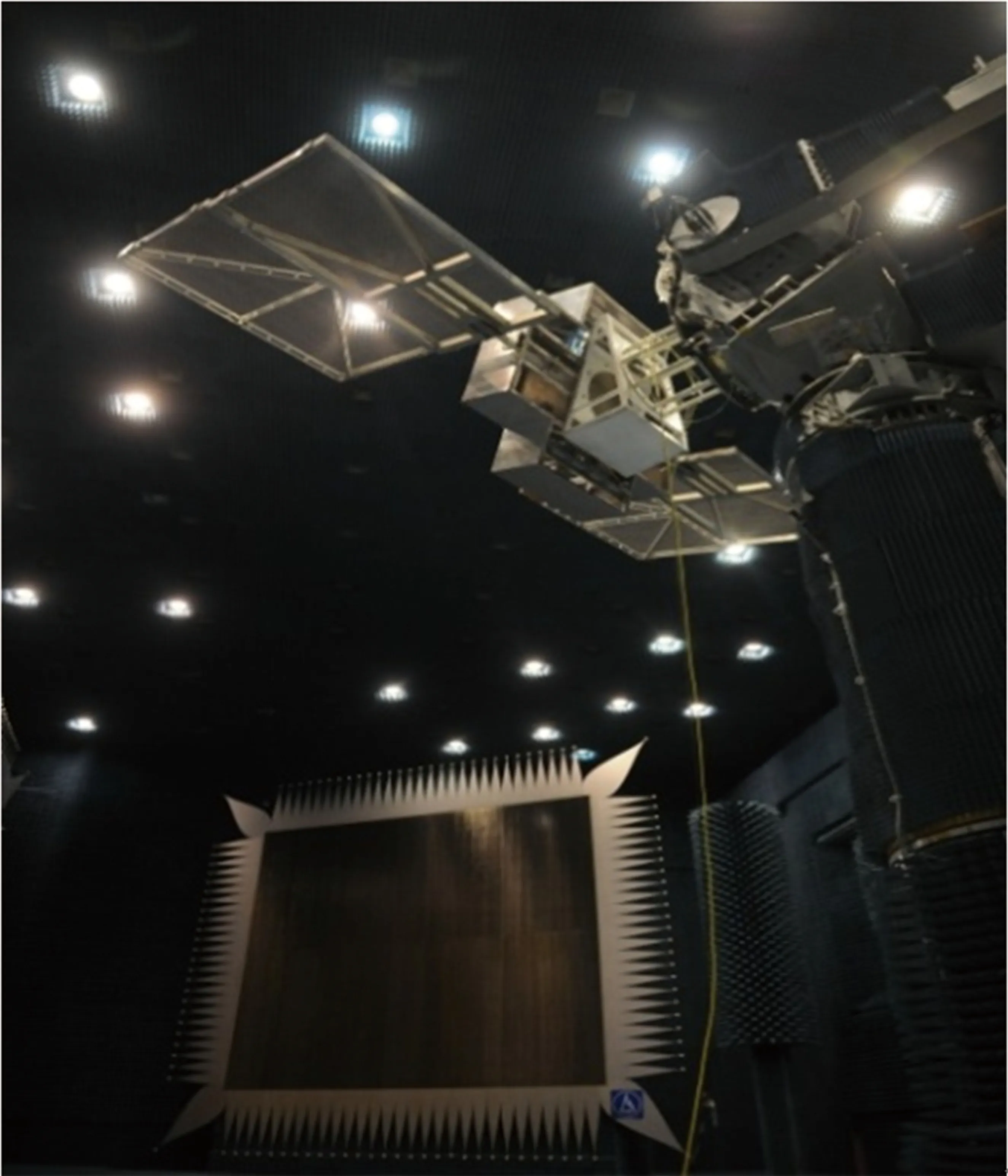
圖4 緊縮場(chǎng)測(cè)試現(xiàn)場(chǎng)Fig.4 Construction field test site
物理仿真外場(chǎng)試驗(yàn)主要完成以下內(nèi)容:雙天線模式的平均接收星數(shù)測(cè)試;太陽(yáng)翼對(duì)載波相位和偽距測(cè)量精度的定性影響分析;單點(diǎn)幾何定位指標(biāo)分析;精密單點(diǎn)定位指標(biāo)分析,間接完成對(duì)載波相位測(cè)量精度的指標(biāo)分析,作為事后精密定軌模塊的輸入,如圖6所示。

圖6 外場(chǎng)試驗(yàn)現(xiàn)場(chǎng)Fig.6 Field experiment site
事后精密定軌考慮了由于姿態(tài)機(jī)動(dòng)導(dǎo)致的數(shù)據(jù)中斷,太陽(yáng)翼遮擋造成的信號(hào)質(zhì)量惡化,在此基礎(chǔ)上進(jìn)一步加入了動(dòng)力學(xué)模型誤差,其中重力場(chǎng)模型采用100階次,大氣密度模型則選用DTM78模型,這與仿真軌道的動(dòng)力學(xué)模型區(qū)別較大,同時(shí),每90 min估計(jì)大氣阻力系數(shù)以及切向、法向的經(jīng)驗(yàn)力用以補(bǔ)償動(dòng)力學(xué)模型誤差,在解算時(shí)考慮了衛(wèi)星多種復(fù)雜敏捷機(jī)動(dòng)模式下的真實(shí)姿態(tài)信息[8],經(jīng)過計(jì)算事后精密定軌指標(biāo)見表1所示,惡劣的情況下指標(biāo)將達(dá)到24 mm。
表1 測(cè)試數(shù)據(jù)Table 1 Test Data
利用原始測(cè)量數(shù)據(jù)引入誤差模型后的數(shù)據(jù)進(jìn)行實(shí)時(shí)定軌計(jì)算,位置精度為2.07 m,速度精度為0.002 19 m/s,具體曲線如圖7所示。

圖7 雙天線導(dǎo)航接收機(jī)事后精密定軌仿真測(cè)試結(jié)果Fig.7 Simulation test results of precise orbit determination after two-antenna navigation receiver
3 在軌試驗(yàn)驗(yàn)證
3.1 導(dǎo)航定軌精度在軌驗(yàn)證
高分多模衛(wèi)星于2020年10月30日切換到北斗全球?qū)Ш蕉ㄎ荒J剑樌瓿啥ㄎ欢ㄜ墸谲壏€(wěn)定運(yùn)行超過7天,全球連續(xù)定位無(wú)故障,定軌功能正常,且支持整星各種敏捷成像任務(wù)及回放任務(wù)的正確執(zhí)行,實(shí)時(shí)定軌指標(biāo)驗(yàn)證,是我國(guó)雙頻北斗全球?qū)Ш侥J降氖状伍_機(jī)測(cè)試,具有重要意義。
1)導(dǎo)航定軌結(jié)果統(tǒng)計(jì)
(1)GPS模式下雙天線實(shí)時(shí)定位結(jié)果均在3~5 m(三軸1σ)之間,滿足技術(shù)要求。
(2)BD模式下雙天線實(shí)時(shí)定位結(jié)果均在3~5 m(三軸1σ)之間,滿足技術(shù)要求。
(3)BD模式實(shí)時(shí)定軌果和GPS模式實(shí)時(shí)定位結(jié)果相當(dāng),如圖8所示。
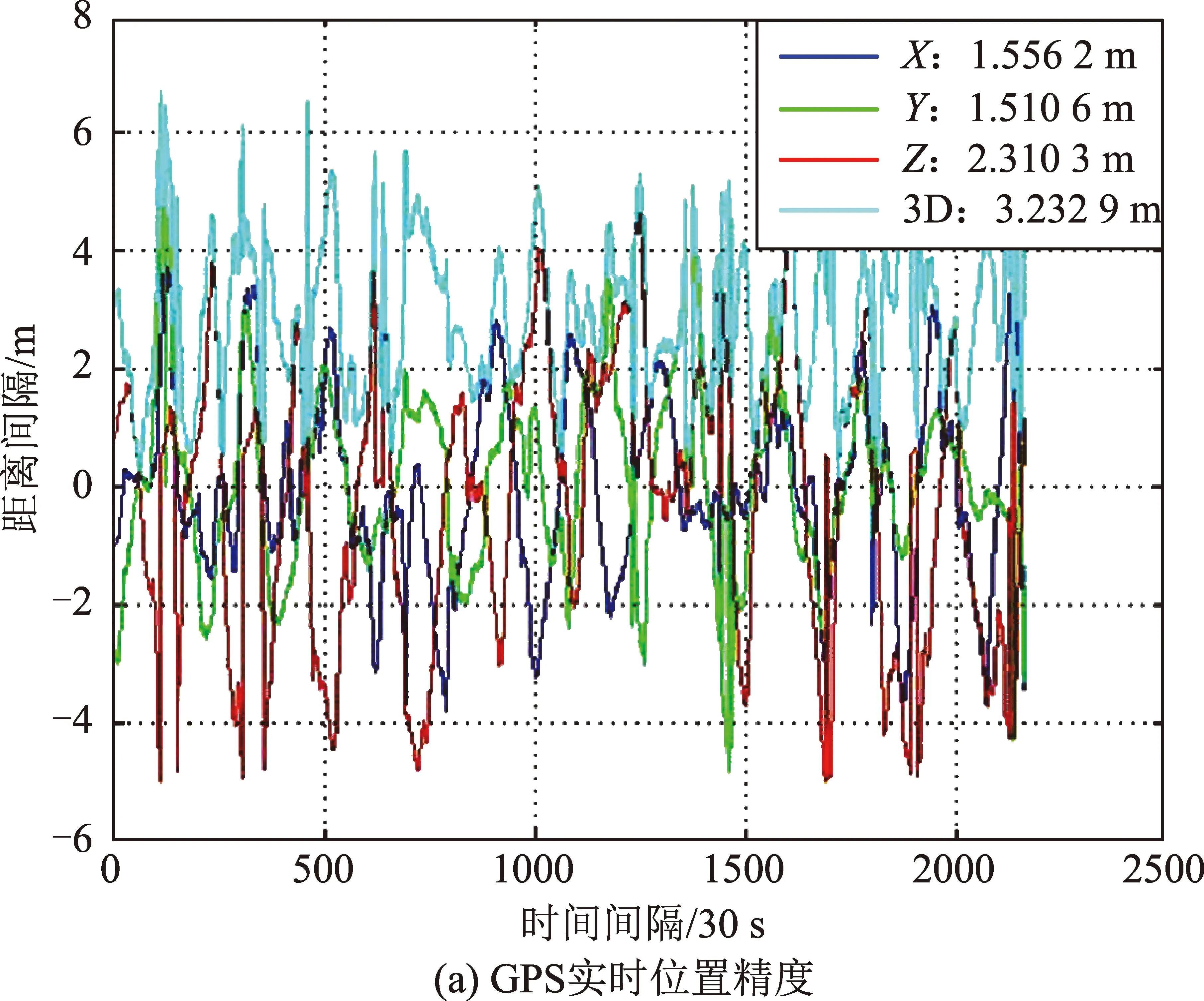
圖8 在軌實(shí)時(shí)精密定軌驗(yàn)證結(jié)果Fig.8 On-orbit real-time precision orbit determination verification results
2)精密定軌驗(yàn)證
(1)BD模式下雙天線精密定軌結(jié)果均在1.9~6.1 cm(三軸1σ)之間,2副導(dǎo)航天線精密定軌結(jié)果相當(dāng),滿足技術(shù)要求。
(2)GPS模式下雙天線精密定軌結(jié)果均在0.8~2.3 cm(三軸1σ)之間,2副導(dǎo)航天線精密定軌結(jié)果相當(dāng),滿足技術(shù)要求。
(3)GPS模式精密定軌結(jié)果與BD模式精密定軌結(jié)果相當(dāng),如圖9所示(圖中三軸為(R、T、N)方向;R表示徑向,沿軌道半徑的方向;T表示切向,與軌道相切的方向;N表示法向,與軌道垂直的方向。

圖9 在軌事后精密定軌驗(yàn)證結(jié)果Fig.9 Verification results of precise orbit determination after in-orbit
3.2 敏捷機(jī)動(dòng)下導(dǎo)航定位定軌穩(wěn)定性在軌驗(yàn)證
2020年7月5日—10日,高分多模衛(wèi)星在軌開展了高速機(jī)動(dòng)下的導(dǎo)航功能性能測(cè)試,其中三軸最大機(jī)動(dòng)角度接近40°,滾動(dòng)角速度最大-4(°)/s、俯仰角速度最大+4(°)/s和-4(°)/s,導(dǎo)航接收機(jī)運(yùn)行在雙天線定位定軌模式下,實(shí)時(shí)定位定軌均正常。
3.3 S頻段測(cè)控在軌測(cè)試的驗(yàn)證
2020年7月5日—10日對(duì)于S頻段測(cè)控子系統(tǒng)USB對(duì)地、擴(kuò)頻對(duì)地以及擴(kuò)頻中繼等模式進(jìn)行了測(cè)試,功能性能均滿足指標(biāo)要求。對(duì)地測(cè)控的自動(dòng)增益控制(AGC)值均在-75 dBm左右,距離-106 dBm的靈敏度指標(biāo)有近30 dB的余量;對(duì)中繼測(cè)控中,由于中繼測(cè)控天線45°~70°仰角可用,因此測(cè)控弧段為“面包圈”形狀,在中繼測(cè)控的測(cè)試過程中,衛(wèi)星通信中心提供了整個(gè)中繼測(cè)控弧段,面包圈的內(nèi)側(cè)也提供給衛(wèi)星使用,整個(gè)過程中“面包圈”內(nèi)部的信噪比(SNR)明顯變小,但沒有發(fā)生失鎖情況。對(duì)于使用一代中繼星的測(cè)控弧段來(lái)說(shuō)可將45°~70°仰角的要求修改為40°~80°可用,可將測(cè)控弧段使用范圍擴(kuò)大到0°~80°。
4 結(jié)束語(yǔ)
高分多模衛(wèi)星測(cè)控分系統(tǒng)針對(duì)長(zhǎng)壽命高可靠敏捷衛(wèi)星特點(diǎn)開展了針對(duì)性設(shè)計(jì),S頻段測(cè)控子系統(tǒng)的可靠度達(dá)到了0.999 7以上,具備星地星間測(cè)控功能,在具備全球測(cè)控能力的同時(shí)有效增加了測(cè)控抗干擾能力;導(dǎo)航子系統(tǒng)采用雙天線同時(shí)解算方案,是國(guó)內(nèi)遙感衛(wèi)星的首次在軌應(yīng)用,經(jīng)過驗(yàn)證GPS和BD兩種模式下的雙天線實(shí)時(shí)定位指標(biāo)接近3 m(三軸合成),事后定軌指標(biāo)優(yōu)于10 cm(三軸合成),同時(shí)在衛(wèi)星敏捷機(jī)動(dòng)過程中始終保持定位輸出。高分多模衛(wèi)星測(cè)控分系統(tǒng)設(shè)計(jì)方法及測(cè)試驗(yàn)證結(jié)果,可為后續(xù)遙感衛(wèi)星提供技術(shù)借鑒。