高分多模衛(wèi)星控制分系統(tǒng)設(shè)計及在軌驗證
2021-07-03 02:33:52呂高見關(guān)宏田科豐傅秀濤姚寧
航天器工程 2021年3期
呂高見 關(guān)宏 田科豐 傅秀濤 姚寧
(北京控制工程研究所,北京 100094)
高分多模衛(wèi)星(GFDM-1)是我國首顆分辨率優(yōu)于0.5 m同時具有多種敏捷成像模式的民用光學(xué)遙感衛(wèi)星,也是國內(nèi)首顆具備姿態(tài)機(jī)動自主任務(wù)規(guī)劃的衛(wèi)星。衛(wèi)星采用降交點地方時為10:30 Am的太陽同步回歸軌道,軌道傾角97.96°,與以往同類衛(wèi)星相比[1-4],GFDM-1衛(wèi)星對控制分系統(tǒng)姿態(tài)測量精度、姿態(tài)確定精度、衛(wèi)星姿態(tài)控制精度、壽命、質(zhì)量、可靠性和地面驗證方面都提出了更高的要求,尤其是衛(wèi)星的機(jī)動能力,較以往遙感衛(wèi)星有大幅度提高。為了滿足任務(wù)要求,控制分系統(tǒng)通過新研中大型控制力矩陀螺、大量程三浮陀螺、甚高精度星敏感器、高穩(wěn)定度太陽帆板驅(qū)動機(jī)構(gòu)、一體化磁力矩器、基于1553B總線體系的“中心控制單元+驅(qū)動控制單元”控制器等核心產(chǎn)品,并采用高精度姿態(tài)控制方案,實現(xiàn)了衛(wèi)星在軌高精度高穩(wěn)定度運行;控制分系統(tǒng)采用基于二級總線的輕小型化體系結(jié)構(gòu),實現(xiàn)控制分系統(tǒng)減重,并使衛(wèi)星具備良好的系統(tǒng)擴(kuò)展性;設(shè)計星上姿態(tài)機(jī)動自主任務(wù)規(guī)劃方案,使衛(wèi)星具備星上自主姿態(tài)規(guī)劃和姿態(tài)機(jī)動;采用硬件冗余和系統(tǒng)重構(gòu)方案實現(xiàn)控制分系統(tǒng)8年長壽命設(shè)計,并對關(guān)鍵單機(jī)開展壽命驗證。
本文在對GFDM-1衛(wèi)星控制分系統(tǒng)的組成、工作模式等方面進(jìn)行簡單介紹的基礎(chǔ)上,重點對衛(wèi)星控制分系統(tǒng)基于二級總線的輕小型化體系結(jié)構(gòu)、高精度高穩(wěn)定度姿態(tài)控制技術(shù)、敏捷機(jī)動姿態(tài)軌跡規(guī)劃技術(shù)、長壽命高可靠設(shè)計等方面進(jìn)行論述。根據(jù)衛(wèi)星在軌運行數(shù)據(jù),給出了控制分系統(tǒng)單機(jī)和系統(tǒng)性能指標(biāo)在軌驗證情況。
1 控制系統(tǒng)簡介
1.1 分系統(tǒng)主要功能和性能指標(biāo)要求
GFDM-1衛(wèi)星相比以往遙感衛(wèi)星,三軸姿態(tài)測量精度、指向精度、偏流角修正精度要求有較大提高。在機(jī)動方面,中型敏捷衛(wèi)星強(qiáng)調(diào)衛(wèi)星的快速機(jī)動能力,衛(wèi)星在機(jī)動的快速性、機(jī)動模式的多樣性和復(fù)雜性方面均相比以往衛(wèi)星有質(zhì)的突破。主要性能指標(biāo):被動成像模式下,三軸慣性姿態(tài)測量精度優(yōu)于0.001°(3σ);主動成像模式下,三軸慣性姿態(tài)測量精度優(yōu)于0.02°(3σ)。繞任意軸歐拉角最大角加速度1.2(°)/s2,最大角速度4.5(°)/s;典型的機(jī)動指標(biāo)為0~5°/10 s,10°/15 s,25°/20 s,40°/25 s;在軌壽命8年;分系統(tǒng)質(zhì)量為293 kg。
1.2 系統(tǒng)組成
根據(jù)衛(wèi)星功能和性能指標(biāo)要求,控制分系統(tǒng)由姿態(tài)敏感器、執(zhí)行機(jī)構(gòu)和控制器3部分組成。控制分系統(tǒng)組成框圖如圖1所示。

圖1 控制分系統(tǒng)組成框圖Fig.1 Architecture/Configuration of GNC sub-system
姿態(tài)敏感器包括:甚高精度有源像元傳感器(APS)星敏感器、三浮陀螺、光纖陀螺、一體化紅外地球敏感器、太陽敏感器。執(zhí)行機(jī)構(gòu)包括:控制力矩陀螺、一體化磁力矩器、帆板驅(qū)動機(jī)構(gòu)、推進(jìn)子系統(tǒng)。控制器包括:中心控制單元、驅(qū)動控制單元。
1.3 主要工作模式
為滿足任務(wù)要求,GFDM-1衛(wèi)星控制分系統(tǒng)的工作模式包括:主動段模式、入軌段控制模式、正常對地運行模式、點對點姿態(tài)機(jī)動模式、姿態(tài)/角速度預(yù)置模式、偏置飛行模式、勻地速非沿跡跟蹤模式、勻角速度勻積分時間跟蹤模式、測試與標(biāo)定模式、軌控模式、全姿態(tài)捕獲模式、無控模式、凝視模式、慣性定向模式等多個模式。其中正常飛行模式是衛(wèi)星的長期運行模式,引入偏流角修正,姿態(tài)任務(wù)接收與規(guī)劃模式處于待命狀態(tài),在衛(wèi)星收到姿態(tài)機(jī)動任務(wù)后,衛(wèi)星通過對目標(biāo)點進(jìn)行姿態(tài)規(guī)劃并自主執(zhí)行,進(jìn)入姿態(tài)機(jī)動模式(點對點姿態(tài)機(jī)動模式或者姿態(tài)/角速度預(yù)置模式),并在成像任務(wù)開始前進(jìn)入目標(biāo)模式(偏置飛行模式、勻地速非沿跡跟蹤模式、勻角速度勻積分時間跟蹤模式、凝視模式、慣性定向模式)。衛(wèi)星有軌控任務(wù)時,衛(wèi)星通過繞俯仰軸或者滾動軸進(jìn)行大角度姿態(tài)機(jī)動,機(jī)動至軌控姿態(tài)后,衛(wèi)星自主進(jìn)入軌控模式。衛(wèi)星姿態(tài)失穩(wěn)或衛(wèi)星接收到整星能源安全報警后,衛(wèi)星進(jìn)入全姿態(tài)捕獲模式。各模式之間設(shè)計有進(jìn)入和退出條件,星上可自主或根據(jù)地面指令進(jìn)行模式切換。各個模式的姿態(tài)確定和姿態(tài)控制方式均有所不同,下面對正常飛行模式、姿態(tài)機(jī)動相關(guān)模式等主要工作模式進(jìn)行簡單介紹。
(1)正常飛行模式采用陀螺預(yù)估加星敏感器修正的方案進(jìn)行姿態(tài)確定。在陀螺故障時設(shè)計有星敏無陀螺姿態(tài)確定方案。姿態(tài)采用CMG的高穩(wěn)定度控制算法,磁力矩器提供卸載力矩,必要時采用噴氣保護(hù)。根據(jù)太陽信息,控制高穩(wěn)定太陽翼驅(qū)動機(jī)構(gòu)轉(zhuǎn)動,實現(xiàn)太陽翼對日;同時對待執(zhí)行任務(wù)進(jìn)行姿態(tài)規(guī)劃,并進(jìn)行數(shù)傳天線、中繼天線的控制指向計算。
(2)姿態(tài)機(jī)動相關(guān)模式是在衛(wèi)星接收到成像任務(wù)或者天線控制任務(wù)后,進(jìn)行相應(yīng)的姿態(tài)機(jī)動時,經(jīng)歷的一系列模式轉(zhuǎn)換并實現(xiàn)任務(wù)所需要的姿態(tài)。在姿態(tài)機(jī)動過程中,使用陀螺數(shù)據(jù)對星體姿態(tài)進(jìn)行預(yù)估,根據(jù)姿態(tài)機(jī)動軌跡規(guī)劃結(jié)果,在機(jī)動結(jié)束時,將星敏的姿態(tài)信息引入,進(jìn)行姿態(tài)修正。在成像任務(wù)、數(shù)傳天線任務(wù)或者中繼天線任務(wù)時,建立偏置飛行模式、勻地速非沿跡跟蹤模式、勻角速度勻積分時間跟蹤模式、凝視模式、慣性定向模式等,實現(xiàn)衛(wèi)星的成像、數(shù)據(jù)傳輸?shù)热蝿?wù)。姿態(tài)機(jī)動及穩(wěn)態(tài)控制過程中,系統(tǒng)使用CMG進(jìn)行高精度、敏捷機(jī)動姿態(tài)控制。同時,根據(jù)軌道角速度,控制高穩(wěn)定太陽翼驅(qū)動機(jī)構(gòu)轉(zhuǎn)動,保證任務(wù)執(zhí)行結(jié)束回對地姿態(tài)后,太陽翼處于對日狀態(tài)。
2 技術(shù)特點
2.1 基于二級總線的輕小型化體系結(jié)構(gòu)
為滿足輕質(zhì)量約束,并滿足系統(tǒng)的可擴(kuò)展性,GFDM-1衛(wèi)星控制分系統(tǒng)采用基于內(nèi)部1553B總線的結(jié)構(gòu)形式和通用單機(jī)模塊化設(shè)計思想[5-8],控制分系統(tǒng)的體系結(jié)構(gòu)如圖1所示。中心控制單元通過內(nèi)部1553B總線與驅(qū)動控制單元、甚高精度APS星敏感器、三浮陀螺、一體化紅外、控制力矩陀螺和帆板驅(qū)動機(jī)構(gòu)進(jìn)行通信,實現(xiàn)與各主要部件之間的信息交互;通過RS422串口實現(xiàn)與光纖陀螺、數(shù)字太陽敏感器等通訊,完成光纖陀螺、太陽等姿態(tài)測量敏感器數(shù)據(jù)采集;驅(qū)動控制單元作為輔助控制器,負(fù)責(zé)完各部件加斷電控制和磁力矩器、推進(jìn)子系統(tǒng)等單機(jī)的數(shù)據(jù)采集和控制。同時為了提高分系統(tǒng)電源的可靠性,將集中供電改為分散供電,具體見圖2。

圖2 控制分系統(tǒng)電源拓?fù)鋱DFig.2 Power resource topology of GNC sub-system
2.2 高精度高穩(wěn)定度姿態(tài)控制技術(shù)
為保證GFDM-1衛(wèi)星具有穩(wěn)定姿態(tài)測量基準(zhǔn),衛(wèi)星將3個甚高精度星敏感器與相機(jī)一體化安裝,同時,通過對星敏感器溫控進(jìn)行專項設(shè)計,使星敏感器溫度控制點的溫度控制在±1 ℃以內(nèi),在星敏感器布局、結(jié)構(gòu)形變控制、熱控方面保證星敏感器擁有優(yōu)異的測量環(huán)境,同時,在控制方案上還采用了甚高精度星敏感器標(biāo)定方法,并根據(jù)星敏感器測量誤差的高低頻噪聲特點設(shè)計星敏感器濾波參數(shù),實現(xiàn)衛(wèi)星在軌高精度姿態(tài)測量。
衛(wèi)星剛體模型為
(1)

為滿足整星敏捷機(jī)動的要求,控制分系統(tǒng)采用5個控制力矩陀螺繞星體Z軸的圓錐面均勻分布。為規(guī)避控制力矩陀螺的控制力矩奇異,在框架角速度指令精確解算的基礎(chǔ)上,引入零運動規(guī)律和魯棒奇異規(guī)避操縱規(guī)律。當(dāng)在一定框架角下,各CMG的輸出力矩共面,則控制力矩陀螺群的控制作用局限于該面(即輸出合力矩在此平面內(nèi)),喪失三維控制能力,此時稱控制力矩陀螺陷入框架構(gòu)型奇異狀態(tài)(CMG奇異點)。CMG奇異點可分為隱奇點和顯奇點兩種,其中隱奇點附近可以在不影響合角動量變化下調(diào)整框架構(gòu)型(框架重構(gòu)型),脫離奇異狀態(tài),因此不產(chǎn)生附加的合陀螺力矩;對于顯奇異,調(diào)整框架構(gòu)型必然引起合角動量的變化,從而對星體產(chǎn)生力矩。由隱奇異點的特點可知,在根據(jù)期望控制力矩計算基礎(chǔ)上引入框架角零運動規(guī)律,使得框架構(gòu)型遠(yuǎn)離奇異點。顯奇異的規(guī)避主要采用魯棒奇異規(guī)避方法,即根據(jù)奇異度量大小調(diào)整框架角,使得框架構(gòu)型繞開顯奇異點,但星體的運動姿態(tài)與期望(規(guī)劃)軌跡有差異。當(dāng)衛(wèi)星處于穩(wěn)態(tài)狀態(tài)時,采用磁力矩器進(jìn)行角動量卸載,從而保證衛(wèi)星穩(wěn)態(tài)時不處于奇異點附近。


圖3 正常模式下控制效果Fig.3 Performance of normal-mode attitude control

圖4 機(jī)動模式下控制效果Fig.4 Performance of maneuver-mode attitude control
2.3 敏捷機(jī)動姿態(tài)軌跡規(guī)劃技術(shù)
2.3.1 點對點機(jī)動姿態(tài)軌跡規(guī)劃
根據(jù)衛(wèi)星的機(jī)動能力,若采用Bang-Bang軌跡控制時,可以滿足衛(wèi)星的機(jī)動指標(biāo)。但從有效載荷角度來看,衛(wèi)星機(jī)動到位后還需要達(dá)到一定的穩(wěn)定度,才能正常工作。由于衛(wèi)星裝有兩個大型太陽翼,在機(jī)動過程中需要避免太陽翼撓性模態(tài)振動。因此,在進(jìn)行點對點機(jī)動時,衛(wèi)星采用基于角加速度正弦的軌跡規(guī)劃方法來保證衛(wèi)星機(jī)動過程中的平穩(wěn)性。
正弦軌跡規(guī)劃算法中,姿態(tài)機(jī)動的變速段和勻速段時長可寫為
(2)
式中:tacc為變速段時長;tsli為滑行段時長;χ為機(jī)動目標(biāo)角;ωcmg和αcmg為衛(wèi)星的角速度和角加速度。


圖5 角加速度正弦軌跡規(guī)劃Fig.5 Trajectory planning based onsine angular acceleration
2.3.2 主動推掃機(jī)動姿態(tài)軌跡規(guī)劃
GFDM-1衛(wèi)星在掃描成像機(jī)動模式中,要求衛(wèi)星建立一個恒定的掃描角速度(<2 °/s),并保證在該速度下的速度穩(wěn)定度為0.002 (°)/s(3σ)。
在進(jìn)行姿態(tài)和角速度預(yù)置時,系統(tǒng)采用基于末端平滑的7階多項式規(guī)劃來對衛(wèi)星三軸歐拉角進(jìn)行規(guī)劃。多項式曲線規(guī)劃用途廣泛,理論上適用于從任意初始姿態(tài)、姿態(tài)角速度到任意末姿態(tài)、姿態(tài)角速度,且機(jī)動過程時間已知的情況。

(3)
滾動φ、俯仰θ、偏航ψ方向算法相同。規(guī)劃結(jié)果如圖6所示。
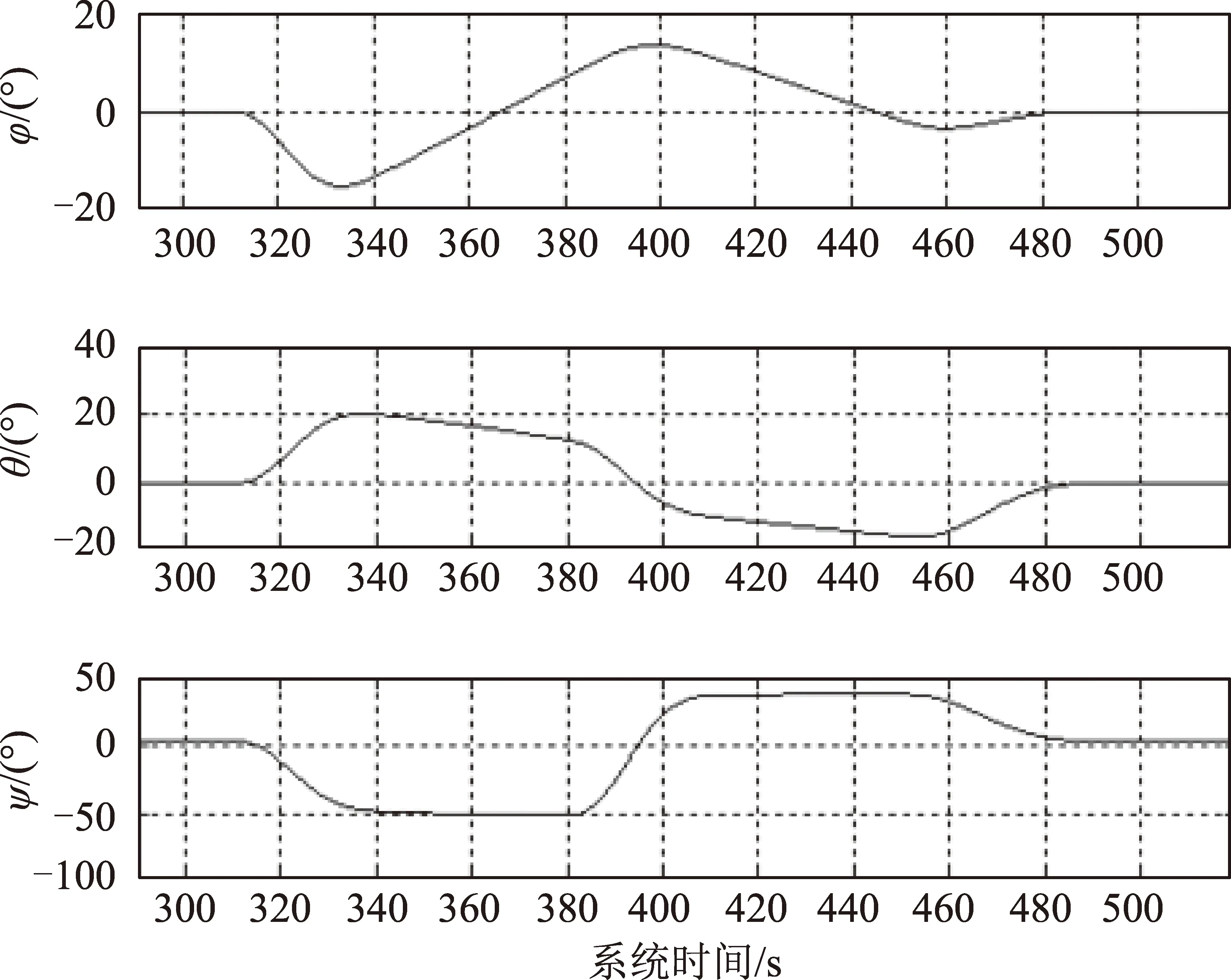
圖6 主動跟蹤姿態(tài)角規(guī)劃Fig.6 Active attitude trajectory planning
2.4 長壽命高可靠設(shè)計
GFDM-1衛(wèi)星作為壽命8年的低軌遙感衛(wèi)星,為保證完成衛(wèi)星長壽命設(shè)計考核,控制分系統(tǒng)從單機(jī)和系統(tǒng)兩個層面開展分系統(tǒng)的可靠性設(shè)計。
單機(jī)層面。分系統(tǒng)從降額設(shè)計、抗力學(xué)設(shè)計、熱設(shè)計、抗輻照設(shè)計、電磁兼容性設(shè)計、靜電防護(hù)設(shè)計等方面對分系統(tǒng)全部單機(jī)開展設(shè)計和驗證。特別是在抗輻照設(shè)計方面,采用高等級元器件和抗輻照加固方案,使所有單機(jī)均滿足輻射設(shè)計余量。同時,研制過程中開展了星敏感器光學(xué)鏡頭抗輻照試驗、擺動式帆板驅(qū)動機(jī)構(gòu)加速壽命試驗和一體化磁力矩器的加速壽命試驗,試驗結(jié)果表明各單機(jī)設(shè)計能滿足衛(wèi)星8年壽命要求。
分系統(tǒng)層面。對影響衛(wèi)星壽命的關(guān)鍵單機(jī)進(jìn)行了優(yōu)化冗余設(shè)計,并開展全面驗證,制定了完善的使用方案。對衛(wèi)星姿態(tài)測量、姿態(tài)控制、衛(wèi)星對日安全模式等均設(shè)計了多種系統(tǒng)重構(gòu)方式,當(dāng)部件發(fā)生故障時,系統(tǒng)自主完成重構(gòu),確保衛(wèi)星穩(wěn)定運行。特別是在安全對策中,利用晨昏軌道和衛(wèi)星受到突出的重力梯度力矩的特點,化擾為穩(wěn),利用重力梯度力矩,設(shè)計了欠測量條件下燃耗少的安全對日方案,長期維持對日的燃料消耗極少,有利于衛(wèi)星的能源安全保障。在信息流方面,分系統(tǒng)設(shè)計了軟、硬同步兩種方式和雙總線方式,確保系統(tǒng)信息鏈路的高可靠。分系統(tǒng)的關(guān)鍵軟件如控制計算機(jī)軟件和星敏軟件等,均設(shè)計了在軌維護(hù)功能,必要時,可通過地面注入程序,對星上軟件進(jìn)行維護(hù)。
3 在軌飛行驗證情況
GFDM-1衛(wèi)星自發(fā)射入軌后,控制分系統(tǒng)快速消除衛(wèi)星太陽翼展開引入的干擾力矩以及數(shù)傳天線、中繼天線展開引起的大角度姿態(tài)偏差。在隨后飛行過程中,新研的控制力矩陀螺、一體化磁力矩器、高穩(wěn)定度太陽翼驅(qū)動機(jī)構(gòu)、甚高精度星敏感器等單機(jī)相繼順利引入系統(tǒng),完成了高精度星敏感器定姿下的正飛姿態(tài)、機(jī)動能力指標(biāo)測試、勻地速機(jī)動成像、軌道控制等一系列飛行姿態(tài)的驗證。GFDM-1衛(wèi)星在軌姿態(tài)控制精度優(yōu)于0.002°(3σ),姿態(tài)穩(wěn)定度優(yōu)于0.000 1 (°)/s(3σ),慣性空間測量精度優(yōu)于0.001°(3σ);敏捷姿態(tài)機(jī)動指標(biāo)滿足整星的設(shè)計要求,控制分系統(tǒng)在軌功能正常,在軌指標(biāo)均優(yōu)于設(shè)計指標(biāo)。
4 結(jié)論
根據(jù)GFDM-1衛(wèi)星高精度、高穩(wěn)定度、敏捷機(jī)動的要求,控制分系統(tǒng)根據(jù)整星的特點,在充分繼承以往遙感衛(wèi)星設(shè)計的基礎(chǔ)上,采用基于1553B總線的輕小型體系結(jié)構(gòu),實現(xiàn)控制系統(tǒng)優(yōu)化;同時針對高精度姿態(tài)控制要求,采用甚高精度星敏感器,實現(xiàn)了在軌的高精度定姿定位;針對機(jī)動模式采用不同方式的姿態(tài)規(guī)劃算法,實現(xiàn)了衛(wèi)星的敏捷姿態(tài)機(jī)動和高精度控制;通過設(shè)計姿態(tài)任務(wù)規(guī)劃算法,實現(xiàn)衛(wèi)星整軌自主姿態(tài)規(guī)劃,在軌連續(xù)姿態(tài)機(jī)動;通過從單機(jī)和分系統(tǒng)層面開展可靠性設(shè)計和驗證,使系統(tǒng)滿足整星壽命要求。衛(wèi)星在軌飛行對控制分系統(tǒng)的功能性能進(jìn)行了充分測試,測試結(jié)果表明控制分系統(tǒng)功能正常,性能優(yōu)于指標(biāo)要求。
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
公民與法治(2020年11期)2020-07-25 02:02:06
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41