高分多模衛(wèi)星圖像定位精度保證設計與驗證
2021-07-02 06:54:18姜洋范立佳于龍江張國斌楊文濤
航天器工程 2021年3期
關鍵詞:分析
姜洋 范立佳 于龍江 張國斌 楊文濤
(中國空間技術研究院遙感衛(wèi)星總體部,北京 100094)
衛(wèi)星圖像的精確定位是保證遙感衛(wèi)星實現(xiàn)高精度對地觀測任務的關鍵,是代表衛(wèi)星性能和服務應用的重要技術指標之一。國外遙感衛(wèi)星無控制點圖像的平面定位精度達到10米量級,而美國在此方面的優(yōu)勢更為明顯,已發(fā)射衛(wèi)星無控制點平面定位精度達到5 m。我國的光學遙感衛(wèi)星圖像定位精度指標不斷提升,2000年左右發(fā)射的遙感衛(wèi)星,其定位精度在200米量級,2010年以后發(fā)射的高分二號等遙感衛(wèi)星,定位精度達到50 m以內(nèi)[1],其中測繪類衛(wèi)星定位精度更高一些,但與國外同期發(fā)射衛(wèi)星相比仍有很大差距。綜合考慮技術發(fā)展現(xiàn)狀和精度差距,新一代中型敏捷遙感衛(wèi)星公用平臺項目確立了將圖像定位精度指標提升至10 m(1σ)以內(nèi)的研制目標,通過平臺研制階段實現(xiàn)各項技術攻關,并最終通過首發(fā)星高分多模衛(wèi)星完成相關技術在軌全面驗證,實現(xiàn)圖像定位精度達到國內(nèi)先進水平,支持未來衛(wèi)星應用任務。
定位精度的實現(xiàn)涉及機電熱多個方面,覆蓋平臺和有效載荷多項技術,且需要天地一體配合的系統(tǒng)來支撐,而敏捷遙感衛(wèi)星除常規(guī)的長條帶推掃成像模式外,具備同軌多點目標、條帶拼幅、多角度、立體等復雜敏捷成像模式,給圖像定位精度指標的實現(xiàn)帶來了更多困難。在姿態(tài)頻繁機動過程中,會出現(xiàn)星敏感器不可用或是頻繁切換,以及導航天線遮擋的現(xiàn)象,引起定姿和定軌精度下降;引起外熱流、內(nèi)熱流變化,使溫度場變化,為衛(wèi)星內(nèi)外方位元素穩(wěn)定性設計增加了復雜度,同時也給地面處理提出了更高的要求。
本文從新一代中型敏捷遙感衛(wèi)星公用平臺和高分多模衛(wèi)星的研制出發(fā),針對圖像定位精度的影響因素進行分析,結合衛(wèi)星工程實踐給出指標分配,提出各項具體設計方案和開展的工作事項,并對各項指標的設計和驗證情況進行說明,最后給出了影響定位精度的關鍵指標實現(xiàn)結果和圖像定位精度的在軌驗證情況。
1 定位精度影響因素分析
高分多模衛(wèi)星承載的有效載荷為0.5 m/2.0 m的線陣推掃式相機,根據(jù)衛(wèi)星攝影測量原理構建嚴密成像幾何模型。嚴密成像幾何模型實際上是圖像坐標系和地球固定參考坐標系之間的轉換關系[2]。以飛行方向為X方向,其圖像定位的基本模型可表示為
(1)

在地面處理過程中,由于內(nèi)外方位元素高度相關,為了避免過度參數(shù)化,內(nèi)方位元素通常采用幾何檢校模型為綜合指向角模型。依據(jù)相機安裝誤差、軌道測量誤差、姿態(tài)誤差等對幾何定位精度的影響特性進行分析,線元素誤差與角元素誤差對幾何定位精度的影響具有等效性,可將線元素誤差等效成姿態(tài)角誤差,從而采用偏置矩陣對影響無控制點定位精度的眾多誤差進行統(tǒng)一補償[3],則幾何定位模型轉換成如下形式。
(2)

衛(wèi)星圖像無控定位涉及衛(wèi)星平臺、姿態(tài)軌道測量、相機幾何參數(shù)標定及圖像地面攝影測量處理等多個環(huán)節(jié)。結合以往遙感衛(wèi)星研制經(jīng)驗和高分多模衛(wèi)星的設計方案分析,影響遙感衛(wèi)星圖像定位精度的主要因素可以分解為時間精度、定軌精度、定姿精度、相機內(nèi)方位元素穩(wěn)定性和相機-星敏感器結構熱穩(wěn)定性等因素,同時定位精度作為星地一體化指標與地面處理精度密不可分[4],具體影響因素分解如圖1所示。

圖1 定位精度主要影響因素Fig.1 Main factors influencing positioning accuracy
2 定位精度指標體系
根據(jù)定位原理分析得出影響定位精度的主要因素,包括軌道確定、姿態(tài)測量、結構穩(wěn)定性、內(nèi)方位元素穩(wěn)定性、時間同步和地面標定6個方面,構成天地一體的定位精度保證體系,采用文獻[4-5]中的分析方法,量化分析每個方面因素對定位精度的影響。綜合分析結果表明:時間同步精度影響相對較小,而其他因素對定位精度均有很大影響,尤其是姿態(tài)測量和結構穩(wěn)定性,按照當前水平引起的定位精度合計達到幾十米量級,因此,為保證高圖像定位精度指標的實現(xiàn),應重點開展定姿與定軌關鍵單機研制、相機與星敏感器結構穩(wěn)定性設計,實現(xiàn)在敏捷狀態(tài)下保持當前定軌精度,達到角秒級的定姿精度,保證相機和星敏感器之間的角秒級的穩(wěn)定性。同時進一步提升時間同步精度、內(nèi)方位元素穩(wěn)定性等其他指標。此外,從星地一體的定位精度指標體系考慮,在衛(wèi)星星上設計保證的同時,充分論證地面標定處理的方案,尤其是針對高分辨率、敏捷特性及熱穩(wěn)定誤差規(guī)律等開展標定和處理技術研究,進一步提升定位精度。考慮衛(wèi)星圖像平面定位精度10 m的指標要求,并結合可行性論證分析的結果,將定位精度總體指標逐一分解到軌道確定、姿態(tài)測量、結構穩(wěn)定性、內(nèi)方位元素穩(wěn)定性、時間同步和地面標定各影響因素,提出衛(wèi)星分系統(tǒng)級、單機級及地面的各項指標,形成天地一體的定位精度指標體系。
3 定位精度保證設計與地面驗證
從定位精度指標體系出發(fā),對衛(wèi)星研制過程中的軌道確定、姿態(tài)測量、時間同步和結構穩(wěn)定性等設計開展技術攻關,對相機設計和地面處理技術完成可行性分析論證,制定了6個方面的設計和驗證工作項目。其中包括:單機級的硬件設計、軟件設計、結構設計、仿真分析、專項試驗;分系統(tǒng)級的算法設計、仿真分析、熱試驗、測試、物理試驗;系統(tǒng)級的整星測試、綜合仿真等項目。
3.1 軌道確定
高分多模衛(wèi)星相對于以往穩(wěn)態(tài)對地成像衛(wèi)星,姿態(tài)頻繁機動會使導航天線接收星數(shù)減少,針對這一敏捷特性采用雙天線的配置方案,設計了無遮擋雙天線冷備份和遮擋情況下雙天線組合的2種工作模式,改進了實時、事后定軌算法,新研制了小型化、模塊化可配置的導航接收機。進行實時、事后定軌仿真分析,開展緊縮場、球面近場和外場試驗驗證,結果滿足指標要求。緊縮場試驗狀態(tài)如圖2所示,事后定軌仿真結果如圖3所示。

圖2 緊縮場試驗狀態(tài)Fig.2 Test condition of compact field

圖3 精密定軌仿真結果Fig.3 Simulation results of precise orbit determination
3.2 姿態(tài)測量
針對高分多模衛(wèi)星敏捷特性,新研制高動態(tài)甚高精度的星敏感器和大量程陀螺,采用兩者聯(lián)合濾波的高精度姿態(tài)確定方案和各敏捷模式的定姿切換策略,改進事后定姿的算法,對星敏感器低頻誤差和陀螺刻度因子等誤差進行標定,從硬件和軟件入手共同提高姿態(tài)確定精度。開展定姿算法數(shù)學仿真、星敏感器專項試驗、事后定姿轉臺物理試驗進行驗證,結果表明:研制光軸測量精度1″的星敏感器并采用雙星敏感器定姿結合改進算法,可以實現(xiàn)事后慣性空間姿態(tài)測量精度達到角秒量級,地面仿真驗證結果如圖4所示。
3.3 時間同步
采用整星、分系統(tǒng)、單機的多級時間同步機制,在硬件秒脈沖授時的基礎上,在軌實時對單機內(nèi)部時鐘鐘漂產(chǎn)生的時間偏移進行補償,即采用高精度秒脈沖授時結合在軌實時補償校時的高精度時統(tǒng)方案,重點提高秒脈沖輸出精度及本地時鐘計數(shù)精度。根據(jù)導航接收機、系統(tǒng)管理單元、控制分系統(tǒng)和相機的時統(tǒng)實測和分析結果,以及整星秒脈沖傳輸延時實測結果,綜合分析整星時間同步精度優(yōu)于20 μs。
3.4 結構穩(wěn)定性
針對結構高穩(wěn)定性要求,從傳遞路徑入手開展包含材料、結構、熱控、相機等多方面綜合設計和分析,采用星敏感器-相機一體化的安裝方案,研制高穩(wěn)定性的載荷適配結構并在相機和平臺之間增加柔性適配結構,進一步消除平臺變形對相機的影響,采用精密熱控措施,減小在軌熱變形。
基于在軌典型工況開展全路徑的熱穩(wěn)定性仿真分析(仿真狀態(tài)如圖5所示),完成了載荷適配結構、星敏感器支架重點部件的高穩(wěn)定設計及試驗驗證,以及相機-星敏感器組合體結構穩(wěn)定性試驗驗證。結果表明:熱穩(wěn)定性設計采取的技術手段合理可行,在一個標定周期內(nèi)能夠保證星敏感器與相機間連接支撐結構在軌穩(wěn)定性優(yōu)于2″,滿足定位精度分配的星敏感器-相機結構熱穩(wěn)定性指標要求。
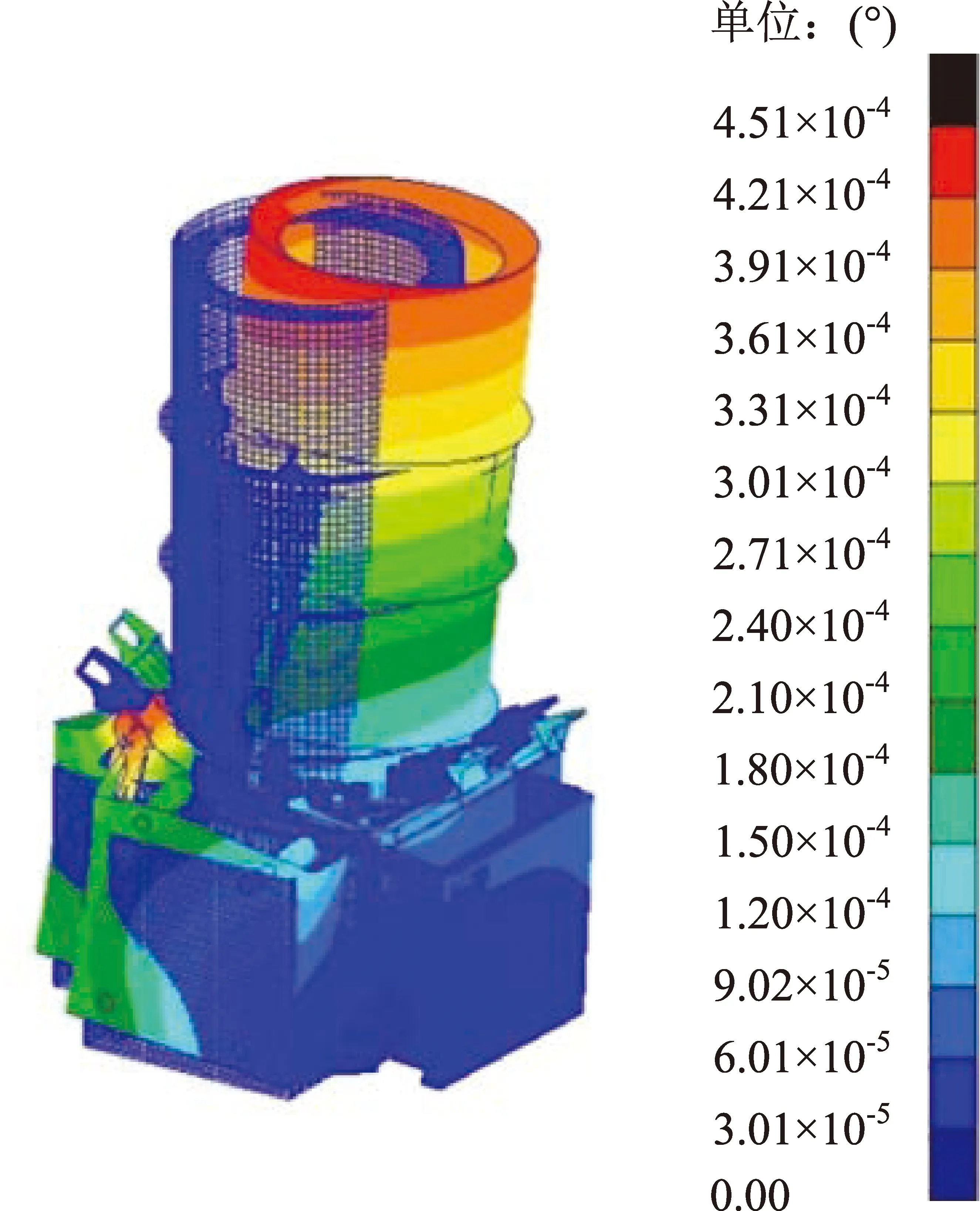
圖5 結構熱穩(wěn)定性仿真分析Fig.5 Simulation analysis of structural thermal stability
3.5 相機內(nèi)方位元素穩(wěn)定性
從相機的光學系統(tǒng)、機械結構和熱控多方面進行設計,論證實現(xiàn)內(nèi)方位元素穩(wěn)定性的措施和方案。針對重力場和溫度環(huán)境兩大主要因素對內(nèi)方位元素影響進行分析,采用光機熱集成分析方法對相機進行性能仿真。經(jīng)分析,在溫度水平附近波動±0.3 ℃的情況下,相機內(nèi)方位元素的變化情況小于2個像元。進一步結合仿真分析結果,完成了相機高低溫多種工況的熱平衡試驗,驗證了熱控設計正確且控溫精度可以實現(xiàn),預期內(nèi)方位元素穩(wěn)定性可以有效保證。相機熱試驗狀態(tài)如圖6所示。

圖6 相機熱試驗狀態(tài)Fig.6 Thermal test of camera
3.6 地面標定與處理
針對高分多模衛(wèi)星的工作模式和對圖像定位誤差的影響因素特性,研究高精度的在軌內(nèi)、外方位元素定標方法,探索外方位元素變化規(guī)律,對星敏感器-相機視軸夾角進行建模,提出了在軌時序化外方位元素定標方法求解外方位元素補償參數(shù);綜合分析提出采用單次、周期性外定標、時序化定標的外方位定標相結合的定標方案;針對高分多模衛(wèi)星的定標需求,開展不依賴檢校場的內(nèi)、外方位元素定標方案研究。聯(lián)合多家單位開展論證工作,完成仿真分析和在軌數(shù)據(jù)試驗驗證,結果表明可以滿足指標要求。
4 圖像定位精度系統(tǒng)指標仿真及估算
采用姿態(tài)規(guī)劃軟件對被動成像工況進行仿真,輸出姿態(tài)和軌道數(shù)據(jù)作為理論參考數(shù)據(jù)。將姿態(tài)軌道數(shù)據(jù)輸入到GPS仿真器,再到接收機輸出含偽距和載波的原始觀測量,經(jīng)過事后處理輸出事后軌道測量數(shù)據(jù);將姿態(tài)和軌道數(shù)據(jù)作為輸入進行溫度場仿真,輸出典型時刻點的溫度場分布情況并賦給星體結構的有限元模型,利用結構穩(wěn)定性仿真模塊進行變形分析,輸出星敏感器、相機的安裝面變化;將姿態(tài)、軌道信息、星敏感器安裝面變化信息輸入給定姿精度仿真模塊,進行姿態(tài)確定輸出3軸姿態(tài);最后將姿態(tài)、軌道、相機安裝面變化信息,結合相機參數(shù)、標定殘差等代入到定位計算模型中,得到圖像平面定位精度。仿真過程如圖7所示。

圖7 定位精度集成仿真過程Fig.7 Process for integrated simulation of positioning accuracy
綜上,考慮軌道確定、姿態(tài)測量、時間同步、結構穩(wěn)定性、內(nèi)方位元素穩(wěn)定性和在軌標定6種主要影響因素,計算其引起的姿態(tài)測量誤差、軌道測量誤差、光學系統(tǒng)誤差、地面處理誤差,估算各項誤差對圖像定位精度的影響,按照上述指標體系初步估算定位精度優(yōu)于9 m。
5 在軌驗證情況
2020年7月3日,高分多模衛(wèi)星由長征-4B運載火箭發(fā)射入軌,衛(wèi)星平臺各分系統(tǒng)工作穩(wěn)定并分階段開展了有效載荷在軌測試。基于衛(wèi)星下傳的平臺服務數(shù)據(jù)和遙測數(shù)據(jù)進行分析,對在軌可直接或間接測量的影響定位精度關鍵因素的在軌狀態(tài)實施評估。其中,軌道測量和姿態(tài)測量精度可以通過數(shù)據(jù)分析獲得,其他影響因素在軌無法直接測量,可以間接定性分析或是通過圖像質(zhì)量整體進行評估。
5.1 軌道確定
利用下傳的導航接收機原始觀測量進行地面解算,獲得事后精密定軌數(shù)據(jù),對多個時段的數(shù)據(jù)進行統(tǒng)計分析,得到GPS模式下雙天線事后定軌精度優(yōu)于5 cm,分析結果如圖8所示。
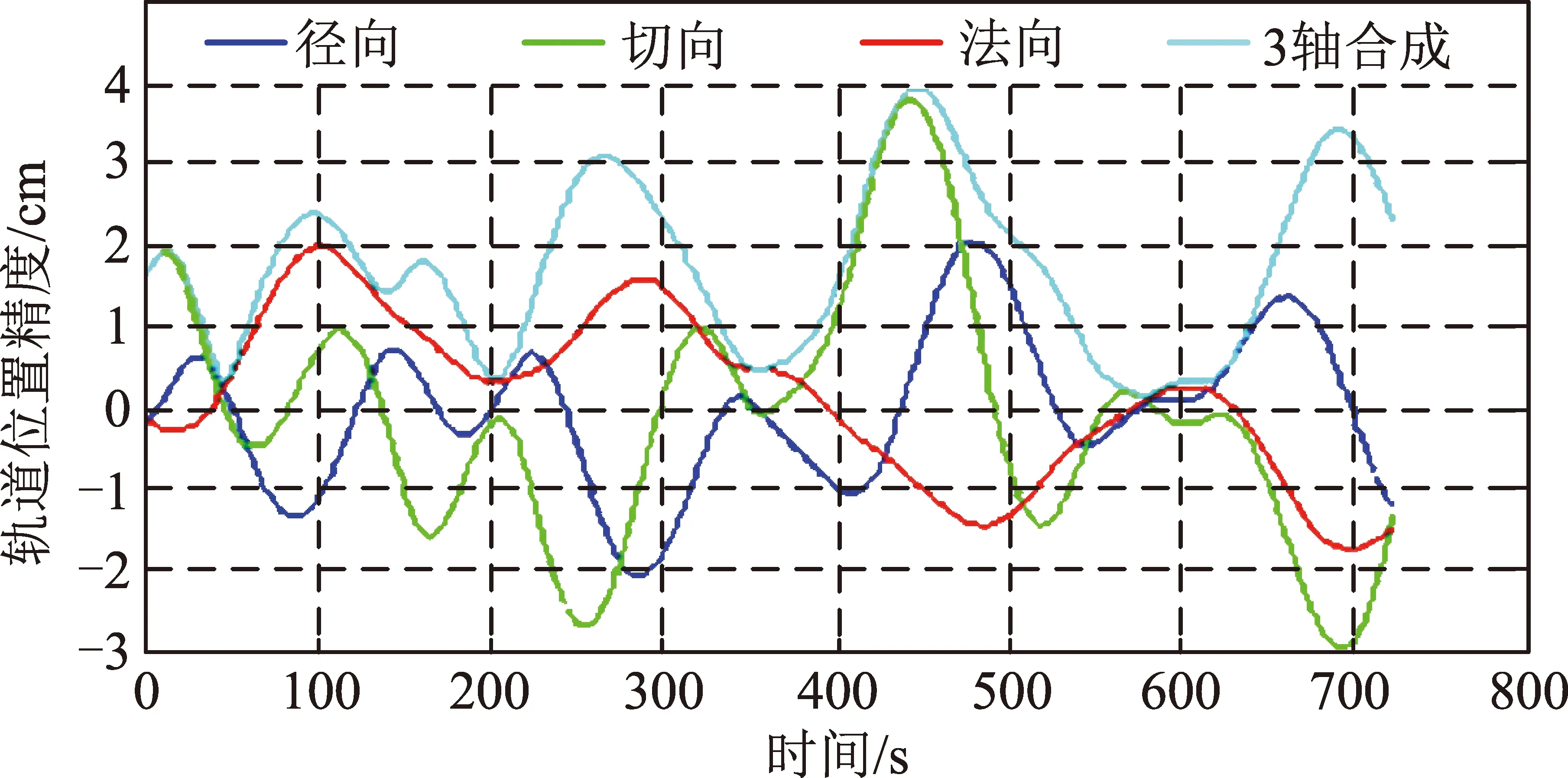
圖8 GPS事后精密定軌精度Fig.8 Post precise orbit determination accuracy with GPS
5.2 姿態(tài)測量
采用7階多項式擬合的方法對下傳的星敏感器數(shù)據(jù)進行評估,經(jīng)過不同時期多段數(shù)據(jù)采樣統(tǒng)計分析可知,星敏感器光軸測量精度優(yōu)于0.6″(3σ),通過多星敏感器星圖融合方式,實現(xiàn)整星亞角秒慣性空間姿態(tài)測量精度,分析結果如圖9所示。

圖9 融合星敏感器在軌精度分析Fig.9 Analysis of fused star sensor on-orbit accuracy
5.3 內(nèi)、外方位元素穩(wěn)定性
衛(wèi)星入軌后,受當前地面圖像數(shù)據(jù)處理方法的限制,難以對各誤差因素進行獨立識別和標定,主要通過圖像定位精度隨時間的變化情況對系統(tǒng)整體穩(wěn)定性進行評估[6]。在軌的結構穩(wěn)定性無法直接測量,可以通過分析星敏感器夾角變化,間接反映星敏感器結構和星敏感器的長周期穩(wěn)定狀態(tài)。采用連續(xù)多圈的星敏感器數(shù)據(jù)分析星敏感器的光軸夾角穩(wěn)定性,統(tǒng)計得到夾角的波動量優(yōu)于2.5″,且周期性和重復性規(guī)律一致,表明結構穩(wěn)定性良好,具體如圖10所示。

圖10 在軌2個星敏感器之間夾角變化情況Fig.10 Angle changes between two star sensors on orbit
此外,結構穩(wěn)定性、相機內(nèi)方位元素穩(wěn)定性和熱控密切相關,對相機、星敏感器支架等部件的溫度進行分析,可以間接評估穩(wěn)定性的狀態(tài)。對入軌飛行初期的22~90圈星敏感器和相機關鍵部位的溫度進行分析,在星敏感器和相機結構路徑上的關鍵部位,如前鏡筒溫度為19.2~19.4 ℃,3個星敏感器支架溫度為20.1~20.3 ℃,主鏡框周向、中心光欄溫度在19.6~19.9 ℃,溫度波動均在0.6 ℃以內(nèi),滿足熱穩(wěn)定性的熱控保證要求。
5.4 圖像定位精度分析
高分多模衛(wèi)星入軌狀態(tài)建立以后,開展了點目標、拼幅、立體、多角度、主動推掃等多種模式成像測試,由中國衛(wèi)星資源應用中心對圖像進行定標和處理,對幾何精度進行全面評估。利用高精度的數(shù)字化幾何定標場,對內(nèi)、外方位元素的系統(tǒng)誤差進行標定,通過多次定標數(shù)據(jù)處理,消除周期性緩慢漂移誤差,確保定位精度的穩(wěn)定性;利用下傳的星敏感器和陀螺的原始數(shù)據(jù)進行事后濾波處理獲得精密姿態(tài),利用下傳的GPS原始觀測量進行事后處理獲得精密軌道,最后利用定位模型計算圖像的定位精度。
中國衛(wèi)星資源應用中心隨機抽取高分多模衛(wèi)星2021年1月內(nèi)不同時相、多種敏捷成像模式下的91景圖像數(shù)據(jù),利用數(shù)字定標場數(shù)據(jù)進行圖像幾何定位精度評價,具體數(shù)據(jù)如圖11所示。由圖11可知:圖像定位精度隨姿態(tài)角變化較小,且在時間維度上沒有出現(xiàn)規(guī)律性漂移,說明內(nèi)、外方位元素穩(wěn)定性較好,圖像定位精度一致性較好。在星下點30°角范圍內(nèi),圖像無控定位精度優(yōu)于5 m(1σ),優(yōu)于10 m(1σ)設計指標要求。
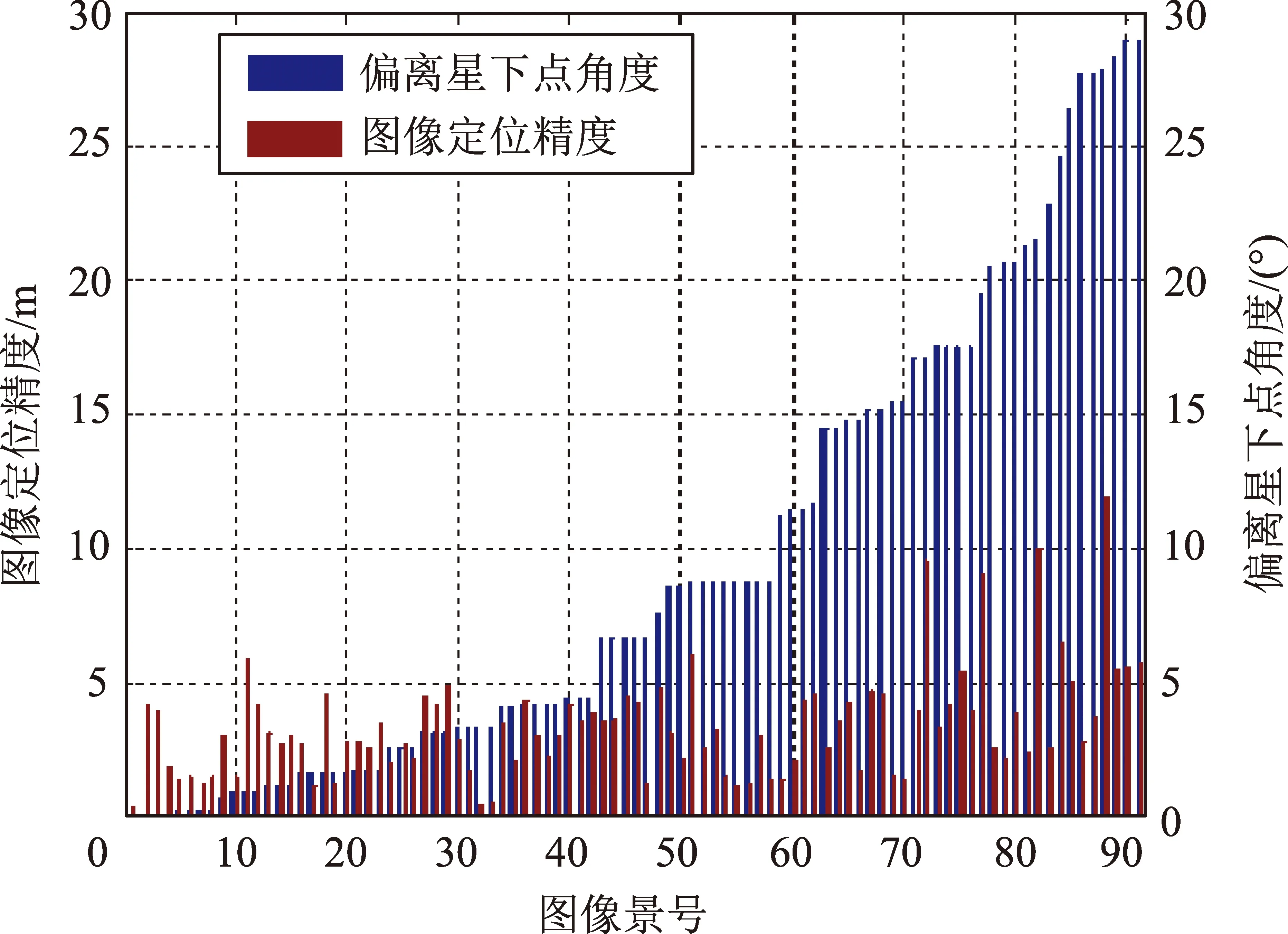
圖11 高分多模衛(wèi)星圖像定位精度評估Fig.11 Positioning accuracy evaluation of GFDM-1 satellite
6 結束語
高分多模衛(wèi)星采用天地一體的圖像定位精度保證系統(tǒng)方案,從系統(tǒng)設計、軟件、硬件等多方面開展工作,完成了分析、仿真、試驗等設計與地面驗證工作。在定位精度的關鍵影響因素中,姿態(tài)測量和結構穩(wěn)定性方面較以往衛(wèi)星有較大提升。在姿態(tài)測量方面,采用甚高精度的星敏感器,制定敏捷成像模式下的定姿切換策略,針對星敏感器-陀螺測量系統(tǒng)中的低頻誤差,采用引入誤差標定的事后姿態(tài)確定方案,姿態(tài)確定精度提高到1″以內(nèi);對于星敏感器-相機的結構穩(wěn)定性問題,重點從材料、結構和溫控多方面開展星上設計,使穩(wěn)定性達到角秒量級,同時針對外方位元素變化的趨勢規(guī)律開展研究,提出了地面廣域時序化定標方案,進一步減小結構穩(wěn)定性引起的定位誤差,確保圖像幾何定位精度穩(wěn)定性。在高分多模衛(wèi)星上實現(xiàn)了高定位精度保證技術的攻關和在軌驗證,其圖像定位精度達到國內(nèi)敏捷遙感衛(wèi)星最高水平,達到國外同類衛(wèi)星水平,可以有效支撐后續(xù)高分多模衛(wèi)星高水平的定量化應用。高分多模衛(wèi)星在軌運行穩(wěn)定,圖像定位精度結果滿足設計指標,表明其定位精度體系設計合理可行,可以為后續(xù)衛(wèi)星研制提供參考。
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(2016年15期)2016-12-01 05:31:22
當代經(jīng)濟研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06