一種變體無人機構型仿真研究
2021-07-02 01:56:50紀鑫東蔣維安
現代計算機 2021年13期
關鍵詞:優化
紀鑫東,蔣維安
(中國民用航空飛行學院飛行技術學院,廣漢618300)
0 引言
無人機是一種由動力驅動、機上無人駕駛、可重復使用的航空器的簡稱,英文常用Unmanned Aerial Vehicle表示,縮寫為UAV[1]。多旋翼無人機作為航空產品領域的一枝新秀,以新穎的結構布局、獨特的飛行方式和廣泛的用途引起了人們越來越多的關注和重視,風行全球,迅速成為新的創業、創新研究熱點[2]。
四旋翼無人機以其獨特的性能,迅速成為旋翼無人機的翹楚,在眾多領域中都有著較好地應用。
復雜環境(例如火災場地或森林搜尋)對無人機的需求較大且較快增長。隨著我國城市建設的高速發展,建筑火災時有發生,造成了人員傷亡和財產損失[3-4]。在火災的高溫作用下,建筑材料的性能迅速劣化,結構構件的承載力下降,極易造成倒塌[5],導致救援通道被阻塞,使人員被困。在滅火救援過程中,消防員需要承受各種極端條件[6]消耗大量時間搬移障礙物,才能找到被困人員。長時間的高溫烘烤和建筑材料的二次塌陷還可對救援人員的生命安全造成嚴重威脅[7-8]。快速探明幸存者的準確位置,對縮短救援時間和減少人員傷亡意義重大。
對在森林中失蹤的人員進行搜尋救援的過程中,大部分情況是在崇山峻嶺中進行的,常用的方法是通過載人直升機在森林上空進行搜尋。當遇到樹木繁多、枝葉茂盛的情況,直升機上的搜尋人員向下觀望的視野容易被枝葉遮擋,并且山中時常伴有局部大霧,也會遮擋上空搜尋救援的視線。
隨著科技的日益進步,飛行器在救援行動中逐漸嶄露頭角[9]。無人機作為災難搜尋救援機器人中的一員,有著得天獨厚的優勢[10]。尤其是四旋翼無人機可以通過建筑物內部的通道,穿插于各個樓層進行巡視,節省了搜尋時間,提高了搜救效率。與地面無人搜尋器和消防員搜尋相比,還能不接觸任何建筑材料從而避免余溫造成損傷。對于森林失蹤人員的搜尋,四旋翼無人機可以在森林內部進行快速穿插搜尋,既可以克服空中直升機搜尋時遇到的障礙物遮擋視線的困難,又可以大大提高搜尋效率。
現有的四旋翼無人機構型的布局為四個螺旋槳彼此之間間距較大,這樣既能保證飛行器飛行過程中的穩定性,又能使各螺旋槳之間旋轉產生的氣流相互影響最小,減少升力損失。
由于失火建筑物內部及森林內部空隙大小不規則,所以在上述兩種環境進行搜尋時,這種固定布局的四旋翼無人機在穿越狹小空間時姿態不靈活,甚至有可能出現旋翼碰撞周圍障礙物,造成旋翼破損、飛行器失控的情況。受限于無人機的尺寸與重量之間的矛盾的制約,較大尺寸無人機難以進入狹小空間執行搜尋任務,影響了可達性;較小尺寸無人機的有效載荷小,難以滿足復雜空間中搜尋任務的需要。
本文提出一種變體結構無人機,旨在減小無人機搜尋的可達性與有效載荷間的矛盾,擴大無人機在特定搜尋環境下的應用范圍。
1 用于復雜環境搜尋的變體無人機構型設計
1.1 構型設計
圖1為所設計的變體無人機構型示意圖,變體構型上的不同部件分別用數字1至數字7標注,標注1為支撐臂驅動件;標注2為機身中央部分;標注3為機身外圍框架部分,該部分與機身中央部分之間為鏤空狀態,保證無人機在變體過程中的氣動特性,同時采用大框架構型,在飛行器變體過程中能夠承受變體層的力矩;標注4為雙葉螺旋槳;標注5為驅動件轉動軸;標注6為支撐臂;標注7為電機。
基于圖1里的“變體無人機構型俯視圖②”中所標注的位置點字母,AB為支撐臂的旋轉半徑,四條支撐臂長度相同,BC、CD、DE和BE均為相鄰兩個驅動件轉動軸之間的距離,AF為螺旋槳半徑,四個螺旋槳尺寸相同。
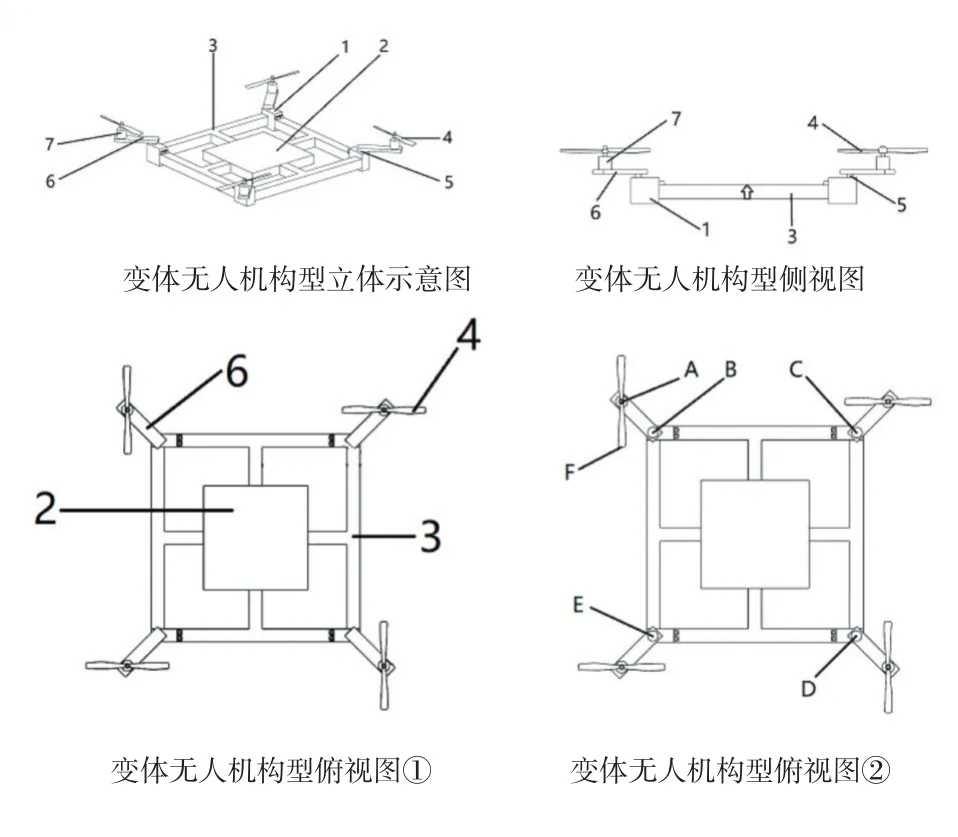
圖1 變體無人機構型示意
上述新型四旋翼無人機構型的工作原理為四個螺旋槳在電機的驅動下給無人機提供升力,當無人機需要通過寬度較窄的空間時,四條支撐臂在驅動件的帶動下繞著轉動軸按既定方向均速旋轉,以此來改變無人機的構型,實現變體。
基于變體無人機構型的運動原理,既要實現變體,又要實現變體后機身橫向尺寸的減小,各設計參數需同時滿足下列三個關系:

1.2 構型建模
根據1.1小節中所列出的構型需同時滿足(1)(2)(3)三個關系式,選取一組滿足條件的具體數值,利用UG軟件進行建模,便于進行運動仿真和干涉性檢查。
現有四旋翼無人機電機與槳片的選擇對應關系如表1所示[2]。

表1 電機與槳片的選擇對應關系
為了保證飛行器既具備一定的載運拉力又達到初始尺寸的盡量減小,還能驗證方案的有效性,使用5英寸槳搭配2800kV值電機。
經實物測量,5寸槳半徑為63.5mm,即AF=63.5mm;實物電機底座直徑為20mm,為確保電機底座安裝牢靠,支撐臂寬度設計數值為20mm,驅動件短邊寬度為20mm,為確保外側機身框架與驅動件安裝牢靠,同時保證機身外側框架對螺旋槳的氣動性影響最小,外側機身框架寬度選擇最小設計值20mm,為保證飛行器機身既能盡量減小又能滿足飛行要求,支撐臂半徑AB設計為70mm,為滿足關系式(3),設計BC=CD=DE=BE=300mm。通過UG(Unigraphics)建立的三維模型如圖2所示。
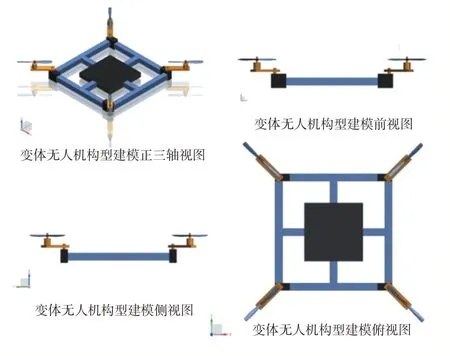
圖2 變體無人機建模示意
2 變體無人機構型仿真分析及優化
2.1 構型仿真分析
該設計的最終目的在于無人機通過變體改變自身結構,達到在必要時可靈活縮小機身橫向尺寸。通過仿真可以確定該無人機構型在各種變體參數下的尺寸以及是否發生運動干涉現象。
將所構建的變體無人機三維模型導入UG軟件運動仿真環境中,在運動仿真環境中,命令連桿、固定桿和運動副,給運動副添加驅動,為了更好了解分析該變體無人機的變體過程,標記并追蹤四個運動的支撐臂,建立解算方案,并進行求解,求解結束后進入運動仿真準備階段,如圖3所示為運動仿真環境中模型的俯視圖,將此時無人機的四個支撐臂的相對位置稱為“初始位置”。
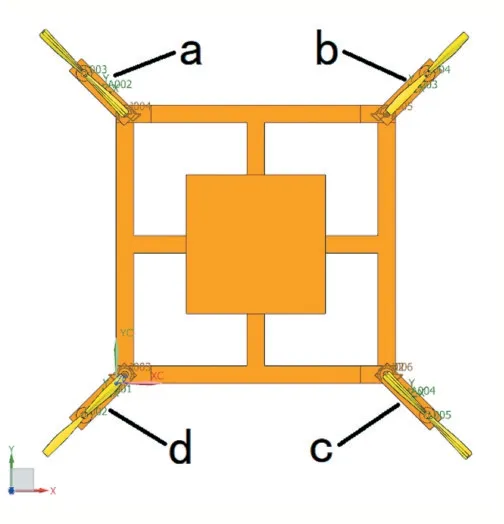
圖3 仿真環境中模型初始狀態俯視
在無人機變體的過程中,為了彼此抵消力矩,a、c支撐臂繞轉軸按順時針方向轉動,b、d支撐臂繞轉軸按逆時針方向轉動,且每條支撐臂轉速相同。
運動仿真結束后,得到如圖4所示為四條支撐臂分別繞轉動軸轉動360°后的無人機構型的俯視圖。
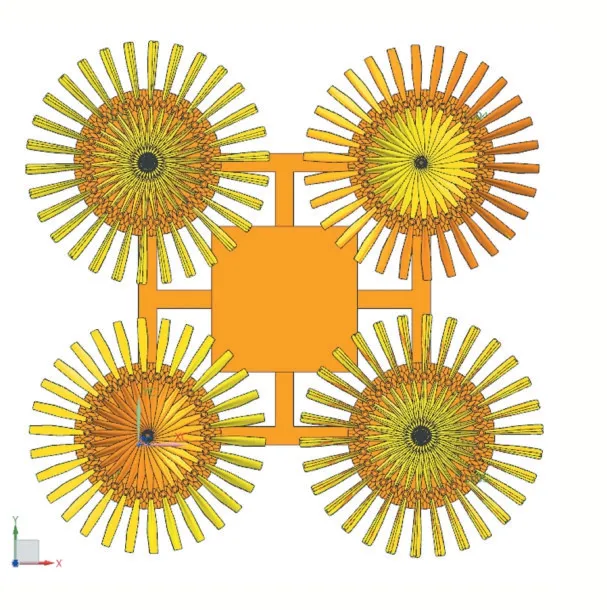
圖4 標記支撐臂旋轉360度后無人機構型俯視
觀察圖4可以得出,當四個支撐臂分別繞著固定轉軸完成360°旋轉后,彼此之間無論在何種相對位置,都沒有碰撞現象發生。由此可以得到,該設計構型能夠實現四個支撐臂的平面360°旋轉,并且在此過程中,四個支撐臂和螺旋槳之間不會發生碰撞,能夠順利實現有效變體。
橫向尺寸運動仿真驗證。
通過觀察如圖4,選定六個支撐臂旋轉到特殊位置(0°、45°、135°、180°、225°和315°)時的狀態,完成螺旋槳的運動仿真,驗證機身橫向尺寸能否因變體而顯著減小。得到如圖5所示的支撐臂不同位置螺旋槳運動仿真示意圖,利用UG軟件自帶的測量工具,得到不同狀態下的無人機構型的XC和YC方向上的最大尺寸數據。
將圖5中不同狀態下的無人機構型的XC和YC方向上的最大尺寸數據列于表2,令初始狀態XC和YC數值為單位1,不同狀態與其進行對比,如表2所示。
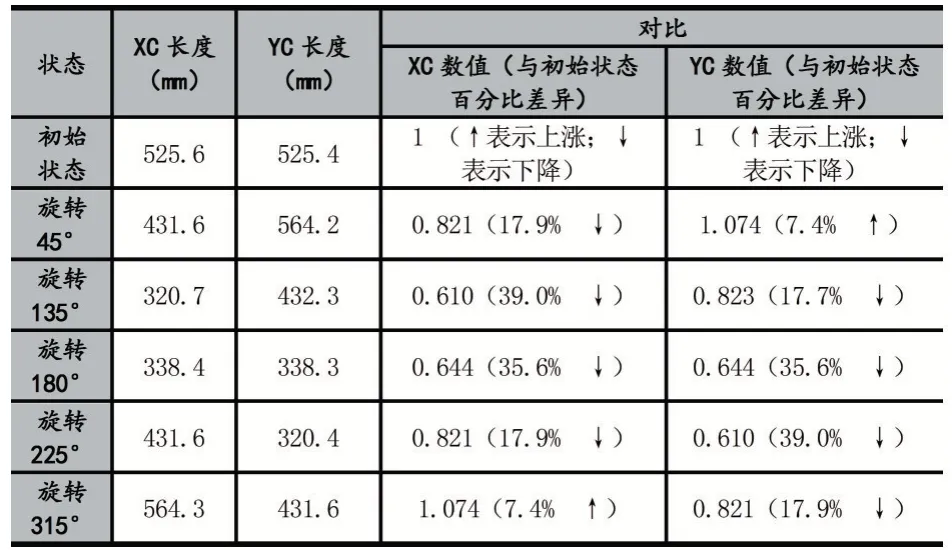
表2 不同狀態下無人機構型XC及YC長度對比
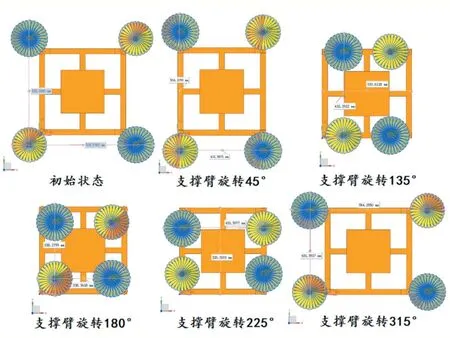
圖5 支撐臂在不同位置的構型尺寸測量
根據表格2中的數據可以得到,該無人機構型在變體的過程中,在支撐臂旋轉了135°時,XC方向尺寸縮減率最大,達到了39.0%的縮減,在支撐臂旋轉了225°時,YC方向尺寸縮減率最大,達到了39.0%的縮減,通過計算得到在支撐臂旋轉了180°時,無人機構型面積縮減率最大,達到了58.53%的縮減。由此得出,該無人機構型通過變體可有效減少機身橫向尺寸。
2.2 構型優化
通過圖5中螺旋槳旋轉仿真圖發現原始構型存在以下不足:
(1)在支撐臂旋轉180°時,機身中央區域有一部分阻礙了螺旋槳的下洗氣流,從而容易造成螺旋槳升力損失;
(2)當構型通過變體面積減小率達到最大時,此時的螺旋槳并沒有完全被保護,還有比部分超出了機身的外沿,容易在飛行的過程中剮蹭到周圍障礙物,造成螺旋槳損傷。
針對無人機構型存在的不足,對其做了以下五點優化:
(1)重新調整構型的機身布局,將機身中部正方體部分優化為圓柱體;
(2)適當增加每條支撐臂長度;
(3)中部機身與外部機身由原來的四條連接支架優化為兩條連接支架;
(4)保留的兩條內外機身的連接支架由原來的長方體優化為圓柱體;
(5)外側機身的寬度減小為原來的一半,由原來的20mm改為10mm。
優化后的無人機構型示意圖如圖6所示。
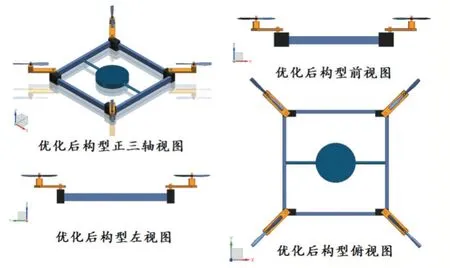
圖6 優化后構型建模示意
構型優化完成后,依然選取特征最明顯的六個狀態進行仿真驗證,得到如圖7所示的優化后的構型支撐臂不同位置螺旋槳運動仿真示意圖,利用UG軟件自帶的測量工具,得到新構型在不同狀態下的XC和YC方向上的最大尺寸數據。
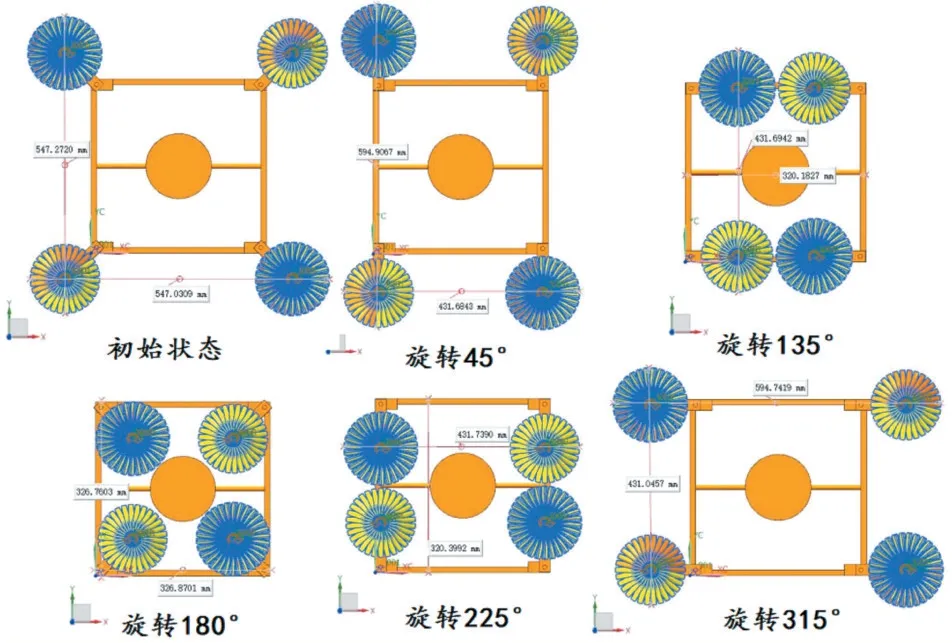
圖7 優化構型支撐臂在不同位置的構型尺寸測量
將圖7中優化后的構型在不同狀態下的XC和YC方向上的最大尺寸數據列于表3,依舊令初始狀態XC和YC數值為單位1,不同狀態與其進行對比,如表3所示。
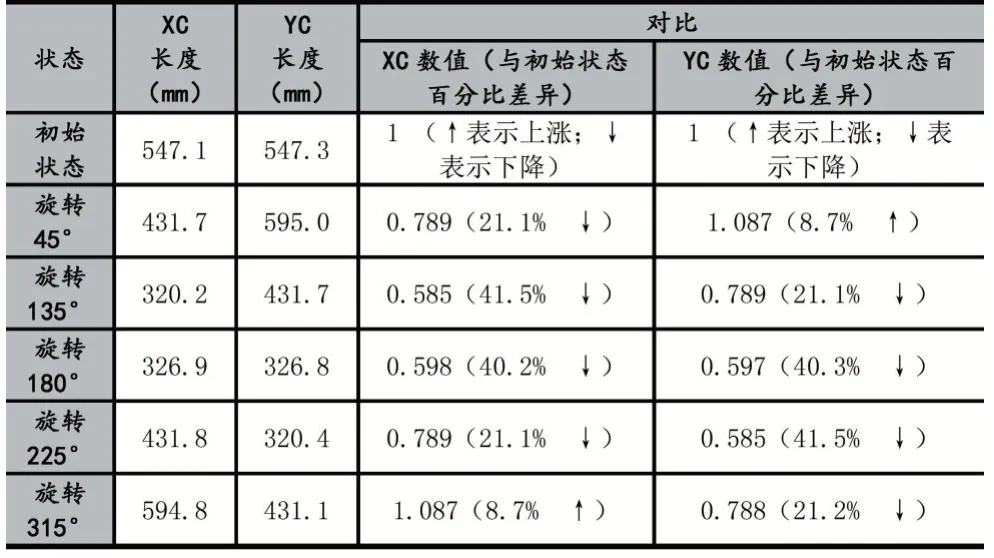
表3 優化后構型不同狀態下XC及YC長度對比
根據表3中的數據可以得到,優化后的無人機構型在變體的過程中,在支撐臂旋轉了135°時,XC方向尺寸縮減率最大,達到了41.5%的縮減,在支撐臂旋轉了225°時,YC方向尺寸縮減率最大,達到了41.5%的縮減,通過計算得到在支撐臂旋轉了180°時,無人機構型面積縮減率最大,達到了64.30%的縮減。
2.3 優化前與優化后對比
將優化前與優化后的幾個典型狀態下的構型對螺旋槳的氣動遮擋面積進行對比,得到如表4所示內容。

表4 優化前與優化后氣動遮擋面積對比
分析比較表2、表3和表4可以得出,優化后的構型比優化前的構型有以下優點:
(1)無人機構型在初始狀態時,最大構型長度優化后比優化前要長,增加了無人機的穩定性;
(2)優化后的構型由于少了兩條支架,減少了整機重量;
(3)當支撐臂旋轉180°時,螺旋槳已經被完全納入到機身范圍內進行保護,避免在飛行過程中受到損傷;
(4)螺旋槳旋轉時產生的下洗氣流沖擊到機身上方的面積比優化前的構型最大減少27.4%,有效降低升力損失,增加了無人機的穩定性;
(5)優化后的構型最大橫向尺寸縮減率和最大面積縮減率均比優化前的縮減率要大。
3 結果
(1)根據失火建筑物內部搜救需求和森林失蹤人員搜救需求,設計了一種變體無人機構型,并構建了其三維模型。
(2)仿真驗證了所設計構型在變體過程中無部件上的碰撞,可以完成變體。
(3)優化前的變體無人機構型變體后橫向尺寸最大減少率為39.0%,面積最大減少率為58.53%。
(4)通過運動仿真發現構型存在可導致額外升力損失的遮擋。通過對構型參數進行優化,大大降低了遮擋面積,降低了可能的升力損失。
(5)優化后的變體無人機構型變體后橫向尺寸最大減少率為41.5%,面積最大減少率64.3%,
(6)優化后的構型最大氣動遮擋面積比優化前減少24.7%。
(7)研究重點在新構型的機械運動及功能的實現及分析,而在變體無人機的氣動特性方面,僅進行了初步探討,在未來需要進行深入研究。
4 結語
(1)利用建模仿真,可有效發現初始構型的重要缺陷。
(2)通過參數優化,可大大降低缺陷的影響。
(3)仿真表明,優化后的變體構型性能良好,設計合理、有效,達到預期設計目的。
(4)通過飛行器變體來提高其在建筑物內部和森林中的搜救效率既是可能的,也是合理的。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45