拖纜和阻尼器對船舶靠泊運動控制的研究
2021-07-01 19:25:50耿新雷
中國水運 2021年5期
耿新雷
摘 要:在近港口區域內的船舶自動靠泊技術是當前的研究熱點。本文提出了一種新的船舶靠泊技術,即使用阻尼器和絞車組成靠泊系統來解決復雜和危險的靠泊作業。在所提出的靠泊系統中,設計了控制器來抵消波浪和其他因素的影響,以保證靠泊過程的安全。通過實驗驗證了所提出的船舶靠泊方法和所設計的控制系統在不可預知的外力作用下的有效性。實驗結果表明,在設計的控制器的有效控制下,船舶能夠及時接近預定位置。本文自動靠泊方法可以為船舶的自動靠泊技術研究提供參考。
關鍵詞:船舶;港口;靠泊系統;阻尼器
中圖分類號:U675.9? ? ? ? ?文獻標識碼:A? ? ? ? ? ? 文章編號:1006—7973(2021)05-0120-02
1引言
船舶靠泊被廣泛認為是船舶控制和自動化領域最復雜的過程。船舶在靠泊過程中,由于受到風、氣流干擾以及淺水、岸壁效應的影響,會產生復雜的動力學行為,難以精確操控,需要通過人的經驗來完成靠泊過程[1]。因此,從理論和實踐上研究自動靠泊技術具有重要的意義。張強等[2]使用ANN算法對船舶的自動靠泊控制進行仿真試驗。在船舶低速運動控制領域,龔征華等[3]基于噴水推進操舵控制系統的工作原理,設計干擾觀測器和全局滑模控制器。
因此,本文提出了一種在保證作業安全的情況下船舶靠泊的新方法,并通過實驗驗證了該方法的可行性。
2系統描述和建模
2.1系統描述
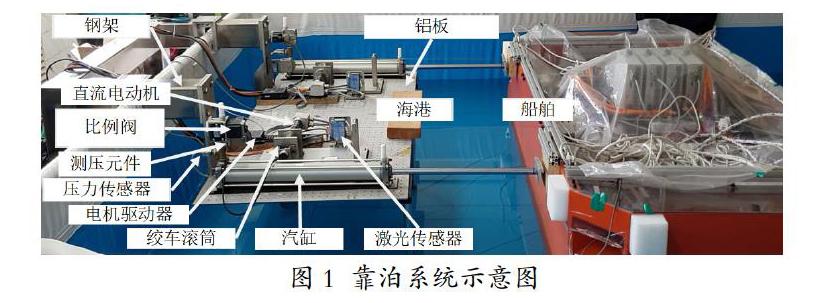
圖1為試驗布置圖,試驗采用的靠泊系統主要由激光傳感器、絞盤系統、電機、壓力傳感器、比例閥、測壓元件等組成。采用一個船模進行了靠泊試驗,在港口一側安裝了兩對電機和氣缸。通過考慮最終的停泊條件,對所提出的思想和系統配置進行初始化。靠泊最復雜的區域(或距離)大約為從船到碼頭邊10m以內,因為在這一區域,靠泊過程通常需要拖船和引航員來協助才能保證安全。因此,本文提出的靠泊方法,除了安裝在陸地上的阻尼器和絞盤系統之外,不需要任何附加的輔助系統。
兩對絞盤和阻尼器用于控制船舶運動。開始靠泊工作,首先連接阻尼器的端部,同時將絞車繩索連接到船只上。通過控制致動器產生的拉力和推力,實現靠泊過程。這意味著,通過適當和有效地控制絞車和阻尼器系統,可以實現理想的控制性能和安全靠泊工作。
2.2系統建模
在實驗裝置準備的基礎上,進行系統辨識過程,分析船舶靠泊系統的動態特性。
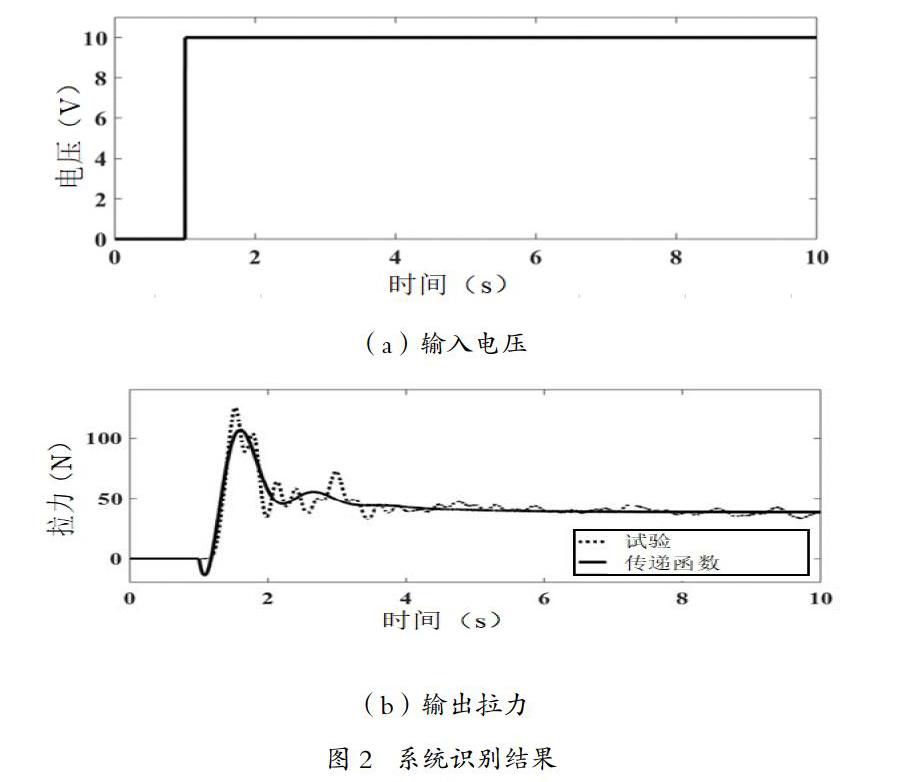
首先,為了獲得絞盤系統的傳遞函數,向絞盤系統施加10V電力(如圖2(a)所示),使得獲得如圖2(b)所示的繩索拉力。可以看出,拉力的試驗值和計算值符合良好。
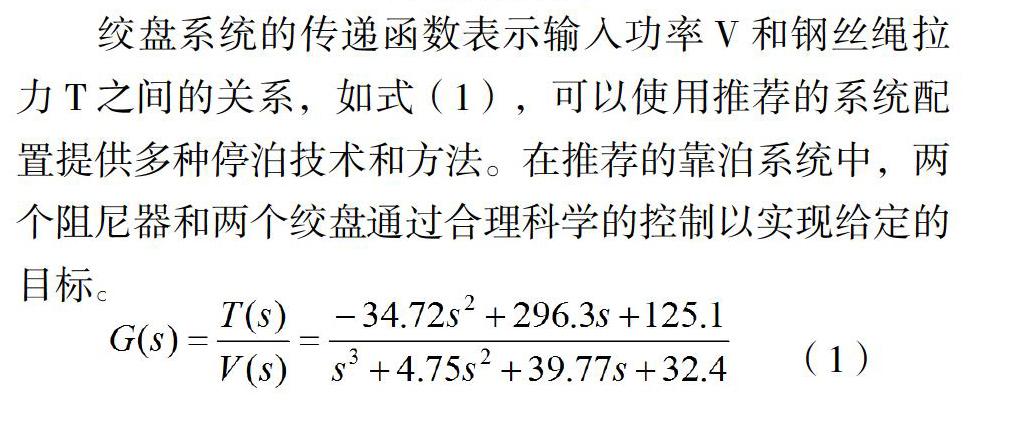
絞盤系統的傳遞函數表示輸入功率V和鋼絲繩拉力T之間的關系,如式(1),可以使用推薦的系統配置提供多種停泊技術和方法。在推薦的靠泊系統中,兩個阻尼器和兩個絞盤通過合理科學的控制以實現給定的目標。
(1)
3試驗
3.1試驗儀器
為了評價所設計的控制系統的有效性,在水池中進行了實驗,使用船舶模型的重215kg、長2m、寬1m。
船只運動由數據采集系統PCI-6229(NI)利用LabVIEW軟件進行測量和控制。從船只到港口的距離由安裝在甲板上的激光傳感器測量,繩索拉力由測壓元件測量,氣缸壓力由壓力傳感器測量。
3.2控制器設計
為了保持理想的鋼絲繩拉力,設計了一種基于滑模控制的控制器。特別是在滑模控制器的設計中引入了超扭曲算法。設計的反饋控制系統的結構如圖3所示。滑動面的典型形式如下:
(2)
其中e是跟蹤誤差,并且
。
3.3試驗結果
本研究的目的是保持繩索的目標拉力,同時將船只移動到所需位置。試驗場景如圖4所示。
在該研究中,目標拉力設定為120N,如圖5(b)中的紅色虛線所示。在圖5(a)中示出了移動到最終位置期間的容器位置。當船只接近目標位置(0.57m)時,外部擾動多次影響船只;在3s、7s和11s,該船主要受到向港口一側推力的影響;相反,在14s和18s,拉力影響船只。通過控制兩個致動器,船只可以在14s內接近最終位置。繩索拉力和絞車控制信號分別如圖5(b)和圖5(c)所示;圖5(d)顯示了整個靠泊過程中阻尼器的壓力變化。如實驗結果所示,我們可以發現,不管干擾的受力如何,船只都被很好地控制,并且按照預期移動到最終位置。
4結論
為了克服原始靠泊方式的缺點,提出了一種將阻尼器和絞車相結合的新的靠泊技術,實驗結果證明了該靠泊方法的良好性能和適用性,可以為船舶的自動靠泊技術研究提供參考。相信隨著自動靠泊控制理論、仿真和海試研究的不斷深入,自動靠泊控制的研究目標將得以實現。
參考文獻:
[1]徐承軍,黃慶林,吳建曲.船舶離靠泊輔助系統的發展與展望[J].港口裝卸,2020(05):50-55.
[2]張強,張顯庫,林南均.船舶自動靠泊簡捷非線性神經網絡控制器[J].中國航海,2017,40(04):11-15+29.
[3]龔征華,田震,熊文,李俊舟,李剛強,袁景淇.全局滑模控制方法在噴水推進操舵系統中的應用[J].上海交通大學學報,2017,51(06):693-697.
猜你喜歡
金橋(2022年10期)2022-10-11 03:29:46
金橋(2022年10期)2022-10-11 03:29:22
艦船科學技術(2022年14期)2022-09-22 03:07:40
機電設備(2022年2期)2022-06-15 03:20:38
艦船科學技術(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
當代工人(2019年20期)2019-12-13 08:26:11
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
水上消防(2018年4期)2018-09-18 01:49:38
中國船檢(2017年3期)2017-05-18 11:33:09