霍爾式高精度電流采集電路的設計
2021-07-01 17:44:09王雅薈馮浩孫旭升
中國新通信 2021年6期
王雅薈 馮浩 孫旭升


【摘要】? ? 國產飛機采用渦輪螺旋槳發動機作為動力源,將螺旋槳旋轉時輸出軸的功率轉化位為推動力,使飛機前進。一旦潤滑油缺失,將會導致潤滑失效。故瞬槳泵和引射活門電磁閥的控制以及電流采集、過流保護功能對于動力控制系統的安全性影響巨大。
【關鍵詞】? ? 霍爾效應? ? 電流采集? ? 功率負載
一、霍爾式傳感器的工作原理與特性
磁場恒定,在一定環境溫度下,控制電流I與霍爾輸出電勢UH之間呈線性關系,直線的斜率稱為控制電流敏感度。霍爾元件的靈敏度系數越大,其控制電流敏感度也越大。
二、整體架構
由于功率負載(瞬槳泵和引射活門電磁閥),接地時穩態電流1A,接通瞬間電流7.5A、10ms。
通過處理器的GPIO 引腳輸出控制信號,經過緩沖器后控制N溝道場效應管輸出2路1A 的離散量信號,輸出信號通過HI芯片1進行回采,由處理器的GPIO進行讀取并監控,實現BIT 檢測。
2.1 MCU選用
選用ST公司的STM32F7系列處理器,借助ART Accelerator?技術和L1緩沖器,可以實現1082 CoreMark/462 DMIPS。
該處理器性能指標如下:
ARM 32-bit Cortex?-M7 架構,支持雙精度浮點運算,內核最大工作頻率
216MHz;512K×16 Bits SRAM ,2018K×16 Bits Flash;靈活的外部存儲器接口,支持32 位數據總線;最多支持4 路I2C,4 路UART,6 路SPI,3 路CAN 及SDIO 等多種外部總線;內部集成上電引導,便于軟件加載;集成24 通道的12 位2.4 MSPS A/D 轉換器;集成2 路12 位D/A;集成通用DMA控制器,支持加速模式并自帶FIFO;片上集成6 通道的PWM單元;最大支持168 個I/O,兼容5V 接口電壓;系統自帶18 個定時器;支持JTAG 調試接口;內部可配置獨立看門狗和窗口看門狗,在CPU 軟件出現故障或者運行時鐘異常時執行復位或中斷程序。
2.2總線緩存器
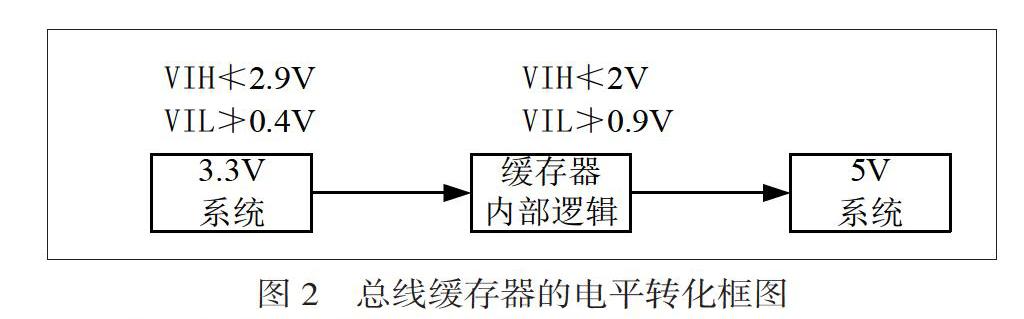
總線緩存器SN74LV4T125是一款低電壓CMOS緩沖器門,并且運行在針對便攜式和電池后備的更寬電壓范圍內。采用了較低閾值電路來設計此輸入,以便匹配Vcc=3.3V時的1.8V輸入邏輯,并且可被用于1.8V至3.3V電平上行轉換器功能中。此外,輸入端上的5V輸入耐受可在Vcc=2.5V時芯片配置為3.3V至2.5V輸入耐受可在Vcc=2.5V時將芯片配置為3.3V至2.5V輸出的下行轉換為1.8V至2.5V的輸出的下行轉換1.8V至5.5V的寬Vcc范圍有可能實現所需的開關輸出電平連接至控制器或處理器。僅通過一個源即可完成電平轉換,具體的電平由緩存器具體的供電電壓決定。且芯片能夠識別的門限值很低。針對總線緩存器端口的輸入信號高電平值≮2V,低電平值≯0.9V,處理器端口的輸出信號高電平≮2.9V,輸出信號低電平值≯0.4V,如圖2所示。SN74LV1T125被設計成具有8mA的電流驅動能力,以減少由高驅動輸出導致的線路反射,過沖和下沖。輸入引腳可耐受5.0V電壓,40°C至125°C工作溫度范圍,鎖斷性能超過250mA。
2.3 MOS管組成的開關控制通道
當UDS=0且UGS>0時,使溝道剛剛形成的柵-源電壓成為開啟電壓UGS(th)。UGS(th)愈大,反型層愈厚,導電溝道電阻愈小。
處理器在復位過程中,GPIO 引腳配置為開路狀態,緩沖器的使能端上拉至電源,緩沖器輸出為開路,N溝道場效應管輸出也為開路。采用N 溝道場效應管及外圍電路實現,該系列場效應管漏源最大電壓100V,最大漏級工作電流36A,導通電阻0.044Ω。
2.4霍爾式電流采集IC
通過用作電流感測通路的主要銅質電流路徑(從引腳1和2,到3和4)的電流不斷上升時,器件的輸出具有正斜率,該傳導通路的內阻通常是mΩ,具有較低的功率損耗,100mV/A輸出靈敏度,輸出電壓與交流或直流電流成比例,能夠采集最大為20A的電流。
當通過用作電流感測通路的主要銅質電流路徑(從引腳1和2,到3和4)的電流不斷上升時,器件的輸出具有正斜率,該傳導通路的內電阻通常是mΩ,具有較低的功率損耗。
根據手冊可知總的電流采集誤差ETOT≯±1.5%。,能夠滿足采集精度要求。
輸出敏感度是磁感應電路敏感度為100mV/A,線性的IC放大增益可以保證電流采集IC在全范圍電流狀態下精度。
2.5分壓電路
已知大功率執行器的瞬態電流最大為7.5V,通過霍爾式電流采集IC,不考慮誤差的情況下,電壓范圍為2.5V~3.25V。后經過分壓電路,電壓轉換為1.25V~1.625V。
在本文中,在已知電流異常最能反映系統故障,通過情況下,如果電流異常能夠得到關注并迅速解決,能夠降低設備的持續傷害率。
通過分析可知,選用HOLT 公司的HI 系列接口芯片及外圍電路分別實現離散量輸出和回采功能,由處理器的GPIO 口分別輸出控制信號給HI 芯片1輸出對應每路離散量輸出邏輯電平為1 時,輸出地信號,最大驅動能力為200mA,輸出導通電阻為4.5Ω,延時最小為400nS;邏輯電平為0時,輸出開路信號,漏電流小于10nA,開路阻抗>100kΩ,延時最大為900nS。
每路離散量輸出具備200mA 過流檢測能力,由處理器的GPIO 引腳進行檢測,過流時邏輯電平指示為1。每路離散量輸出具備狀態回采功能。由處理器的GPIO 口進行結合控制控制邏輯進行判別。處理器在復位過程中,GPIO 引腳配置為開路狀態,HI 芯片內部控制端下拉至地,芯片對外輸出為開路。
參? 考? 文? 獻
[1] 龍芃君. 風速傳感器的設計研究 [J]. 低碳世界. 2019 (01)
[2] 鄭曉東,王健. 無線傳感器網絡安全路由技術研究 [J]. 中國信息化.2018 (12)
[3] 王晶,周新淳. 現代網絡環境下環保共享型智能快遞系統研究 [J]. 科學技術創新. 2018 (33)
[4] 彭仁堂,田占軍. HEMIS-用于能源管理和家庭自動化的混合架構 [J]. 現代經濟信息. 2018 (23)
[5] 曹銀平. 橫河川儀EJA差壓/壓力變送器年訂貨量突破30萬臺 [J].自動化博覽. 2018 (11)
[6] 彩婭. 環境監測中無線傳感器網絡的應用分析 [J]. 化工管理. 2019 (01)
