剛性接觸網(wǎng)腕臂型支持裝置的振動特性分析與結構優(yōu)化
2021-06-30 13:37:06李梟俊吳積欽閆雅斌
振動與沖擊 2021年12期
李梟俊, 甘 磊, 陳 展, 劉 蘭, 吳積欽, 閆雅斌
(1.西南交通大學 電氣工程學院,成都 611756;2.廣州地鐵集團有限公司,廣州 510000)
對剛性接觸網(wǎng)而言,支持裝置是重要的支撐部件,幾乎承載著剛性接觸網(wǎng)的全部質量,而腕臂型支持裝置則具有更高的電壓等級和更長的供電臂,適用于速度等級更高的列車。腕臂型支持裝置除受自身重力以外,主要承受了來自剛性接觸網(wǎng)系統(tǒng)中弓網(wǎng)動態(tài)抬升力載荷影響,隨著列車速度的提升,弓網(wǎng)動態(tài)接觸力的急劇變化,腕臂型支持裝置因而承受著更為復雜多變的載荷,當受電弓通過時引起的振動與沖擊的頻率接近腕臂型支持裝置的固有頻率時,產(chǎn)生的共振將加速其失效,影響其可靠性,因此有必要對其進行振動特性分析與結構優(yōu)化。
模態(tài)分析法可用于分析振動結構中的固有頻率處的振動形態(tài)和共振屬性,并為其振動特性分析及結構優(yōu)化提供了理論依據(jù)。眾多學者利用模態(tài)分析法獲取振動結構的系統(tǒng)模態(tài)參數(shù)[1-4],即固有頻率、模態(tài)振型和阻尼比。姚艷春等[5-6]通過提高1階扭轉頻率達到優(yōu)化車架結構的目的,具體實施方式是通過振動測試與模態(tài)分析方法,分析了玉米收獲機車架田間振動特性;王鵬等[7]對高速動車組車體進行模態(tài)特性分析,得到模態(tài)頻率和振型的變化規(guī)律,以改善車輛的動態(tài)響應特性;孫猛等[8]基于變分模態(tài)分解(VMD)提出一種新的結構模態(tài)參數(shù)識別方法,可根據(jù)實測響應信號準確估計結構阻尼比及自振頻率等模態(tài)參數(shù);劉星光等[9]通過復模態(tài)方法求解了3種典型軸向運動結構(Euler梁、窄板和對邊簡支對邊自由的板)模型的控制方程,給出了其相應的固有頻率及模態(tài)函數(shù);熊春寶等[10]為研究環(huán)境激勵下大跨徑橋梁結構振動響應特性,提出EEMD-小波閾值聯(lián)合濾波方法來提升信號精度,得到結構前3階的豎向自振頻率和相應阻尼比;周輝林等[11]通過預應力模態(tài)分析與諧響應分析對變幅桿進行了優(yōu)化設計,提高了變幅桿的振動傳遞及振幅輸出特性。上述文獻主要從系統(tǒng)辨別角度通過模態(tài)分析法獲取系統(tǒng)模態(tài)參數(shù),并以此研究振動特性,但涉及振動特性與模態(tài)振型之間的關系及對振動結構優(yōu)化的研究較少。
本文針對受電弓對剛性接觸網(wǎng)腕臂型支持裝置的沖擊引起的振動,結合有限元分析和動態(tài)應力采集試驗,通過模態(tài)分析法研究了腕臂型支持裝置的振動特性并對其進行結構優(yōu)化。
1 腕臂型支持裝置有限元分析
1.1 腕臂型支持裝置三維模型
剛性接觸網(wǎng)腕臂型支持裝置由彈性線夾、彈性線夾連接板、絕緣子、旋轉底座等部分組成,除了這些結構以外,還存在著墊片、螺母、彈簧等起到固定和連接作用的部件。
由于使用有限元方法計算時工作量大,為保證計算的準確性,略去因具體使用要求而配置的額外部件(如墊片等),忽略非連接孔和倒角、圓角等對結構變形和重心分布影響較小的特征,并對連接部位的螺絲以及彈性線夾部分做簡化處理。建立簡化后的腕臂型支持裝置的三維模型如圖1所示。

圖1 三維模型
1.2 腕臂型支持裝置有限元網(wǎng)格模型
用ANSYS作為仿真計算的工具,考慮到兼容裂紋擴展分析的要求,對腕臂型支持裝置的實體單元采用SOILD45單元類型。對于網(wǎng)格的類型和大小,平衡計算精度與計算耗時的關系,對形狀較規(guī)則、受力狀態(tài)不復雜的零件選擇較大的單元尺寸(0.999 996 mm)以提高計算速度;對于較小的承載件及承力的接觸位置,為保證分析精度,設置較小的單元尺寸(0.010 007 mm)。最后完成剛性接觸網(wǎng)腕臂型支持裝置的整體有限元網(wǎng)格模型,共包含3 161 373個節(jié)點、1 787 654個單元,腕臂型支持裝置整體有限元網(wǎng)格模型如圖2所示。
圖2 有限元網(wǎng)格模型
1.3 腕臂支持裝置的材料屬性
剛性接觸網(wǎng)腕臂型支持裝置目前通用的材科主要為普通碳素結構鋼Q235A,而其絕緣子外層使用硅橡膠所制成的傘裙包裹,該部分在腕臂型支持裝置疲勞分析的過程中對整體影響較小故可忽略不計,因此腕臂型支持裝置具體材料參數(shù)如表1所示。

表1 主要材料參數(shù)
1.4 靜態(tài)載荷加載分析
靜態(tài)載荷為車輛靜止或絕對平穩(wěn)勻速行駛的工況下,腕臂型支持裝置承受的各工作部件及系統(tǒng)部件的重量。根據(jù)各部件的位置及與腕臂型支持裝置連接方式的不同,將各自對腕臂型支持裝置的約束施加到對應的位置。
剛性接觸網(wǎng)系統(tǒng)中,匯流排、錨段關節(jié)、接觸線以及分段絕緣器等的重量通過彈性線夾加載到腕臂型支持裝置上,主要為垂向載荷,因此在彈性線夾與這些部件的連接部位施加垂直方向作用力;彈性線夾將受到的作用力傳遞至腕臂型支持裝置彈性線夾連接板,并通過絕緣子、旋轉底座與懸掛吊柱相連接,而腕臂型支持裝置通過旋轉底座連接在懸掛吊柱上,該連接對腕臂型支持裝置整體起到固定作用,因此需在連接部位施加固定約束;腕臂型支持裝置自身的重量則直接通過重力加速度進行加載。
剛性接觸網(wǎng)腕臂型支持裝置在實際工況下,其最大應力為119.89 MPa,位于固定底座上邊緣部位,將腕臂型支持裝置近似看成一個懸臂梁結構,整個裝置通過轉軸固定在底座上,弓網(wǎng)動態(tài)抬升力通過腕臂傳遞至此處,因此旋轉底座部位受力較為集中,如圖3所示。腕臂型支持裝置最大變形量為0.878 6 mm,位置在腕臂型支持裝置的彈性線夾連接板,如圖4所示,這是由于腕臂型支持裝置從彈性線夾連接板向后延伸到旋轉底座的部分,腕臂型支持裝置可以近似看成一個懸臂梁結構,而懸臂梁最頂端最易產(chǎn)生最大的變形量,但此變形量充分滿足設計要求。
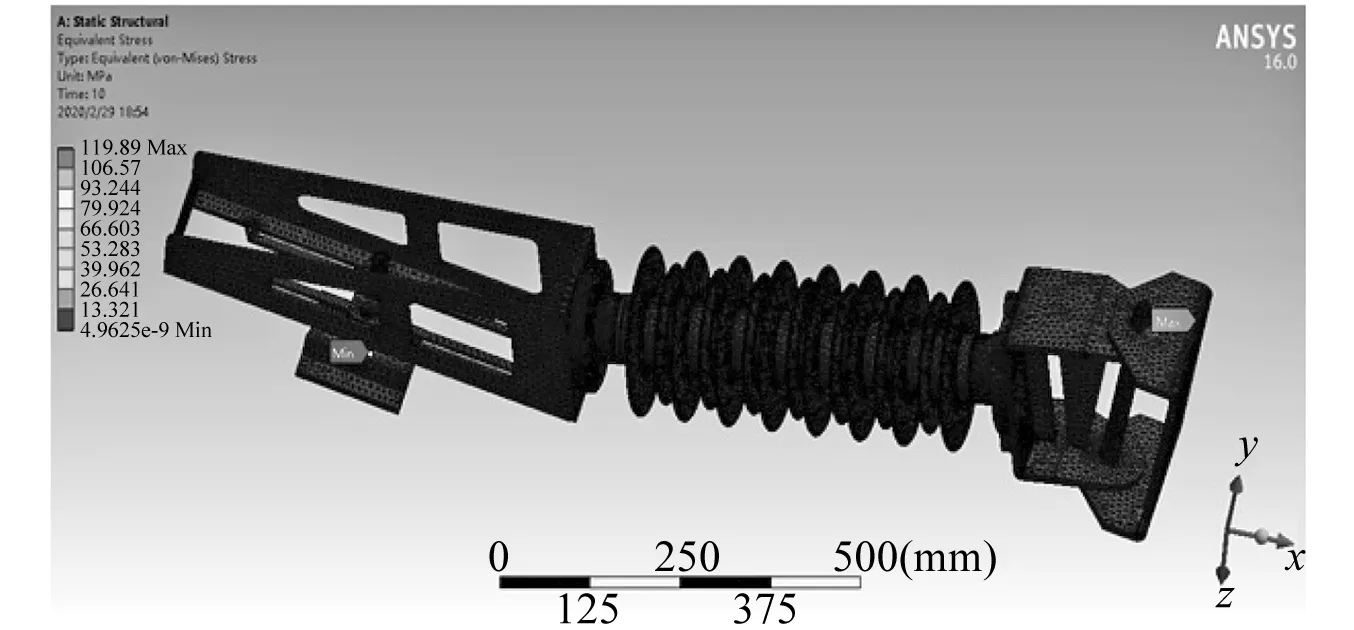
圖3 靜態(tài)載荷下的應力云圖

圖4 靜態(tài)載荷下的變形量云圖
1.5 動態(tài)載荷加載分析
動態(tài)載荷表示加載載荷是隨時間不斷變化的,這種變化可以是諧波信號等規(guī)律變化的,一般可用一定的函數(shù)進行表示,也可以是以數(shù)據(jù)點的形式進行定義。本文以弓網(wǎng)動態(tài)仿真所得的不同速度等級下弓網(wǎng)動態(tài)抬升力對腕臂型支持裝置的隨機載荷-時間歷程進行加載,加載位置為彈性線夾底部。
在動態(tài)載荷譜作用下,腕臂型支持裝置的最大應力和應變比靜態(tài)載荷作用時大,具有隨機性,危險點位置在不同時間步對應的載荷下也有一定的變化,但還是主要集中在彈性線夾與旋轉底座的部位。其應力、變形量云圖如圖5、圖6所示。

圖5 動態(tài)載荷下的應力云圖
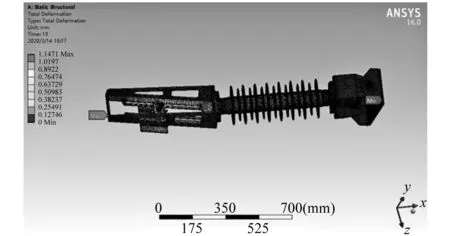
圖6 動態(tài)載荷下剛性接觸網(wǎng)腕臂型支持裝置變形量云圖
2 腕臂型支持裝置模態(tài)分析
2.1 模態(tài)理論分析
結構振動的一般微分方程可描述為:

(1)
式中:M為振動系統(tǒng)的質量矩陣;c為阻尼矩陣;K為剛度矩陣;F為系統(tǒng)所受的外界激勵;x為結構振動的位移向量。
實際應用中,腕臂型支持裝置具不止一個固有頻率,可通過分析結構在無載荷作用下的動態(tài)響應獲得固有頻率,即上式中外界激勵F=0時。對剛性接觸網(wǎng)腕臂型支持裝置而言,整個系統(tǒng)為欠阻尼,即阻尼很小近似滿足c=0,得到無阻尼彈性振動微分方程為:

(2)
方程解的一般形式為:
x=φeiwt
(3)
代入將方程的解,得到:
Kφ=λMφ
(4)
式中:λ為系統(tǒng)的特征值;φ為特征值對應的特征向量;j為虛數(shù)單位;w為系統(tǒng)固有頻率,(Hz);t為時間,(s)。且滿足λ=w2,即可獲得模態(tài)分析中的特值。
2.2 模態(tài)結果分析
腕臂型支持裝置可以簡化為梁結構,其具有個固有頻率與模態(tài)振型,在設計結構時應避免各階固有頻率與可能的載荷振動頻率接近。除去腕臂型支持裝置前6階剛體模態(tài),提取其前4階彈性體模態(tài)振型如圖7所示。
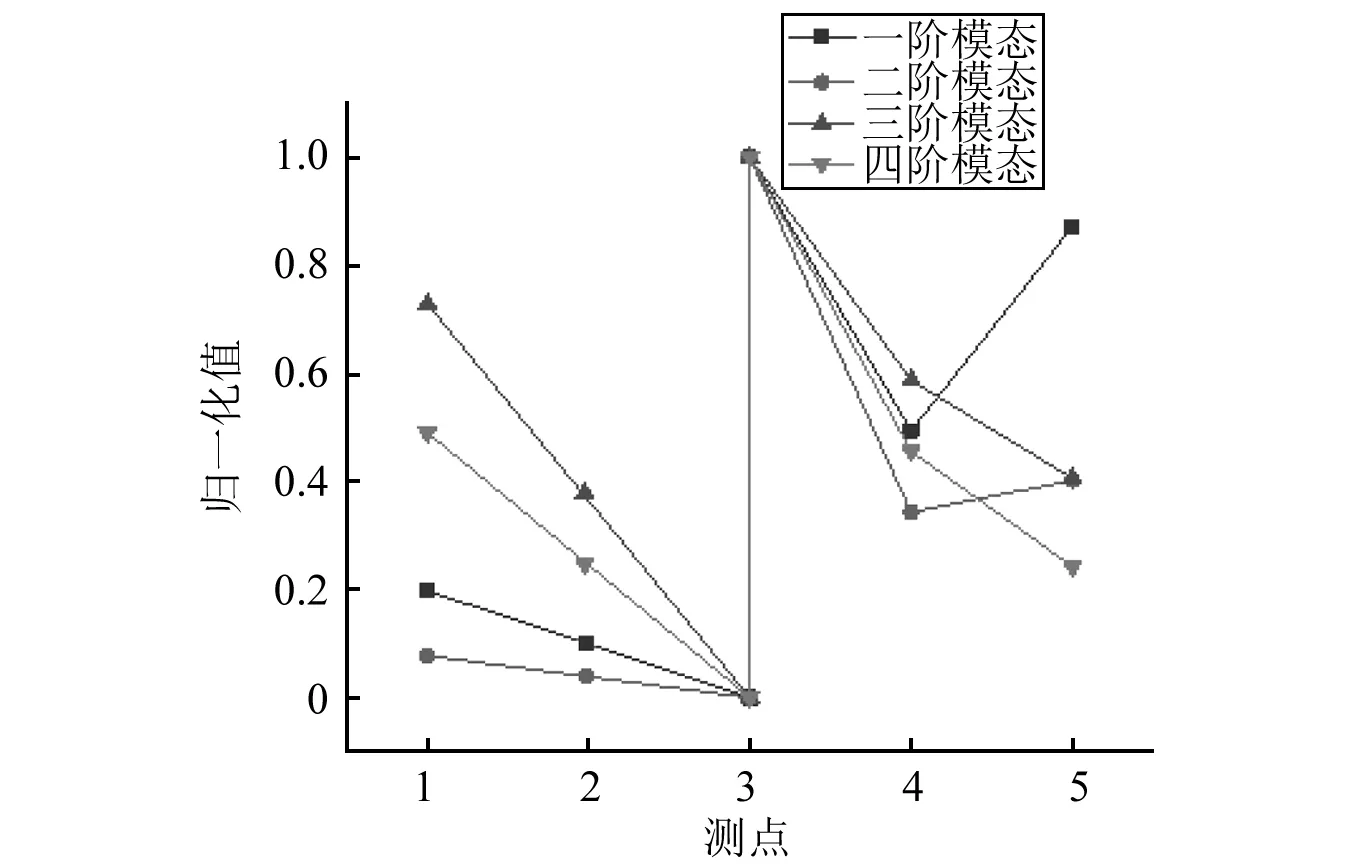
圖7 前四階模態(tài)固有頻率歸一化后變化曲線
由圖7可知,腕臂型支持裝置1階模態(tài)振型主要以扭轉為主,在實際工況中,當受到弓網(wǎng)動態(tài)接觸力作用不均時會發(fā)生扭轉現(xiàn)象,導致腕臂型支持裝置卡滯等故障發(fā)生,引起腕臂型支持裝置失效。腕臂型支持裝置的第2~4階模態(tài)振型主要以1階彎曲為主。提取前六階對腕臂型支持裝置結構強度失效影響較大的振動模態(tài)如表2所示。
從表2可知,腕臂型支持裝置前6階模態(tài)固有頻率集中在16~173 Hz之間,腕臂型支持裝置整體振動以彎曲和扭轉振型為主,第1階扭轉振型頻率為16.752 Hz,第1階彎曲振型頻率為101.57 Hz,彎扭振型構成了剛性接觸網(wǎng)腕臂型支持裝置的低階振動模態(tài)。

表2 前六階模態(tài)的固有頻率
3 腕臂型支持裝置振動特性分析
3.1 腕臂型支持裝置動態(tài)應力載荷采集試驗
剛性接觸網(wǎng)腕臂型支持裝置在進行載荷測試時,測點應該選在應力最大位置及變形最大位置。試驗前首先對剛性接觸網(wǎng)系統(tǒng)實際工作中腕臂型支持裝置的故障情況進行調(diào)研,確定了腕臂型支持裝置在實際工作過程中較易發(fā)生故障的位置為彈性線夾與旋轉底座部位。另通過有限元分析的結果,選擇腕臂型支持裝置上的受力最大點、變形最大點作為測點,測點位置如圖8所示,圖中各測點的具體位置為:測點1-4為懸臂梁結構應力最大位置(彈性線夾所在部位);測點5-8位置為彈性線夾連接板與絕緣子相連接的部位;測點9-12為旋轉底座部位;測點采用應變片單臂電橋原理四個測點為一組進行試驗信號采集。

圖8 測點位置示意圖
3.2 靜態(tài)載荷數(shù)據(jù)分析
完成試驗臺搭建后,首先進行腕臂型支持裝置靜態(tài)下個測點的載荷測試,分析其均值如表3所示。
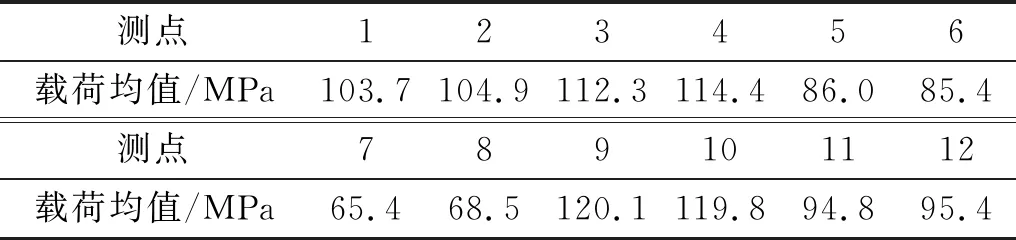
表3 靜態(tài)下各測點的平均應力
由表3可以看出,在腕臂型支持裝置的各測點中,測點1、2因為處于彈性線夾位置此處為力的直接輸入點,承受應力較大;測點5、6承受彈性線夾連接板以及絕緣子的重力因而產(chǎn)生較大應力;測點9和10位于腕臂型支持裝置旋轉底座與吊柱的連接部位,由于腕臂型支持裝置整體的全部質量都通過這個位置傳遞至固定其位置的吊柱上,因此腕臂型支持裝置上的這兩個測點承受載荷最大。
3.3 動態(tài)載荷數(shù)據(jù)分析
試驗中為模擬剛性接觸網(wǎng)腕臂型支持裝置在實際作業(yè)中的工況,為其彈性線夾部位加裝了94.56 kg的配重(以最大跨距為8 m,每米5.91 kg計算),并將實驗臺水平放置于鑄鐵平臺上,將吊柱、緊固螺栓等工具部件以實際工作狀態(tài)安裝,盡量實現(xiàn)與現(xiàn)場工況相同的真實模擬,以此降低測點誤差。測得的各測點應力-時間曲線如圖9所示。

圖9 各個測點應力-時間曲線
3.4 振動特性分析
結合有限元分析結果和動態(tài)應力載荷采集試驗可知,剛性接觸網(wǎng)腕臂型支持裝置易發(fā)生疲勞故障部位集中在彈性線夾和旋轉底座部位,即第1、2、3、4、9、10測試點。
對于平穩(wěn)的隨機信號,傅里葉變換的分析方法能夠將頻譜中的主頻成分突顯出來。因此為了研究對腕臂型支持裝置振動特性影響較大的低頻振動,獲得測試點頻率與振幅之間的關系如圖10所示。

圖10 測試信號頻率與振幅關系曲線
由圖10中可知,剛性接觸網(wǎng)腕臂型支持裝置在試驗過程中,由于弓網(wǎng)動態(tài)接觸力的變化引起腕臂型支持裝置各部件振動的主頻為15.994 7 Hz以及10.305 7 Hz,接近1階扭轉振型對應的固有頻率,易引起腕臂型支持裝置的1階扭轉共振。經(jīng)過統(tǒng)計利用傅里葉變換獲得的測試點頻率集中在0~24Hz低頻范圍之間,因此有必要針對改善一階模態(tài)固有頻率的優(yōu)化方案進行研究。
4 腕臂型支持裝置結構優(yōu)化及驗證
4.1 結構優(yōu)化方案
針對腕臂型支持裝置的振動分析和模態(tài)分析結果,并且基于腕臂型支持裝置零部件厚度與剛度的區(qū)間不連續(xù)的變化方法,腕臂型支持裝置零部件厚度變化區(qū)間為,研究腕臂型支持裝置材料厚度變化對振動頻率影響規(guī)律,如圖11所示。
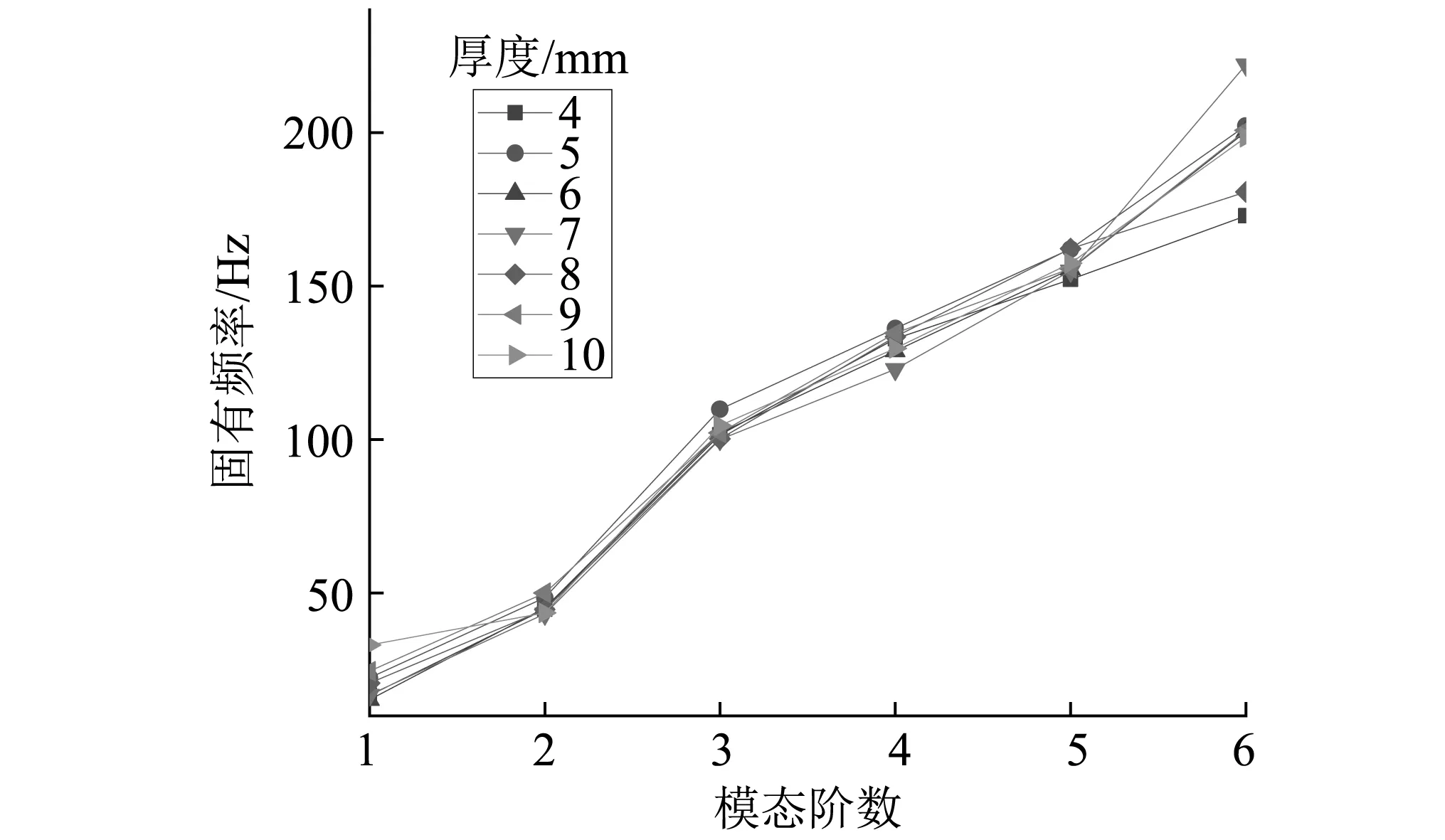
圖11 厚度與各階頻率的關系
由圖11可知,隨著厚度增加,腕臂型支持裝置整體固有頻率提高,在1~3階頻率提高不明顯,3~6階模態(tài)固有頻率得到顯著改善。由此可知,通過增加腕臂型支持裝置零部件厚度可以有效并較快提高腕臂型支持裝置的低階固有頻率,可減小整體振動時腕臂型支持裝置的撓度,即改善腕臂型支持裝置的彎曲特性,提高腕臂型支持裝置的振動特性。


表4 腕臂型支持裝置結構改進
4.2 方案驗證
獲得優(yōu)化前后腕臂型支持裝置的模態(tài)固有頻率如表5所示。由表5可知,優(yōu)化后整體模態(tài)頻率有減小的趨勢。尤其重要的是,低階模態(tài)振動得到有效控制。優(yōu)化后腕臂型支持裝置1階模態(tài)固有頻率由16.75上升到22.40,顯著改善了腕臂型支持裝置的固有頻率,進而改善了整體的振動。優(yōu)化前后各階固有頻率對比如圖13所示。
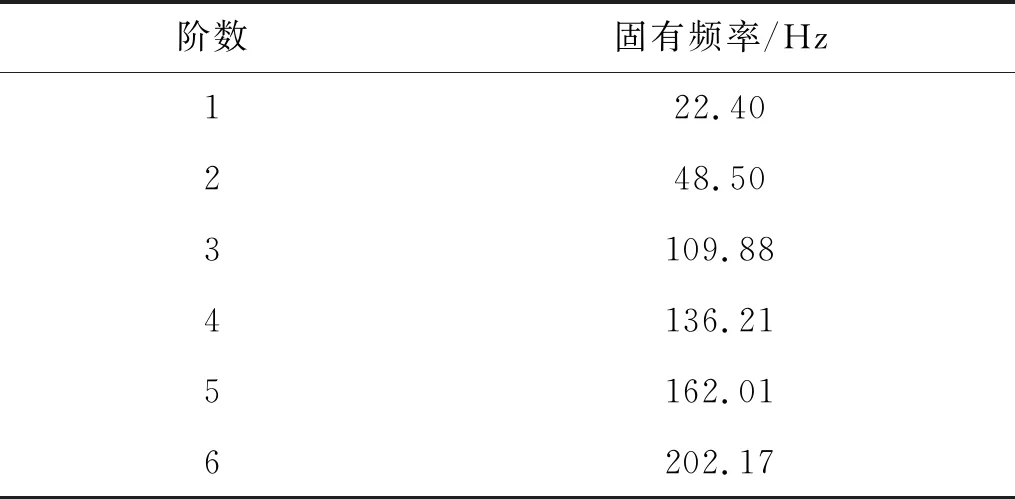
表5 優(yōu)化后腕臂型支持裝置前六階模態(tài)的固有頻率

圖13 優(yōu)化前后各階固有頻率對比圖
通過對比優(yōu)化前后腕臂型支持裝置的分析結果發(fā)現(xiàn),優(yōu)化后腕臂型支持裝置頻率集中在22~203 Hz,優(yōu)化后的腕臂型支持裝置固有頻率遠遠大于弓網(wǎng)動態(tài)抬升力引起的振動頻率,優(yōu)化后腕臂型支持裝置振動較小,運行平穩(wěn),發(fā)生共振概率減小。
5 結 論
通過剛性接觸網(wǎng)腕臂型支持裝置的有限元分析和動態(tài)應力載荷采集試驗,分析了其振動特性,基于模態(tài)分析方法,對腕臂型支持裝置進行了優(yōu)化,本文的結論如下:
(1)通過剛性接觸網(wǎng)腕臂型支持裝置有限元分析與動態(tài)應力采集試驗得知其易發(fā)生疲勞故障部位集中在彈性線夾和旋轉底座部位。
(2)經(jīng)模態(tài)分析發(fā)現(xiàn),腕臂型支持裝置前6階模態(tài)固有頻率集中在16~173 Hz之間,整體振動以彎曲和扭轉振型為主,第1階扭轉振型頻率為16.75 Hz,第1階彎曲振型頻率為101.57 Hz。
(3)采用增減零部件厚度的方法對腕臂型支持裝置進行優(yōu)化。隨著厚度的增加,腕臂型支持裝置的固有頻率相應增加,并且以提高1階固有頻率為目標,優(yōu)化后的腕臂型支持裝置1階扭轉頻率由16.75 Hz提高到22.40 Hz,遠離弓網(wǎng)動態(tài)抬升力信號振動頻率,顯著改善了腕臂型支持裝置的扭轉振型。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
