基于DSP的電力拖動控制系統設計分析
2021-06-30 12:29:24盧俊森
中國設備工程 2021年12期
盧俊森
(云南移民產業投融資有限公司,云南 昆明 650051)
1 基于DSP的電力拖動控制系統軟件設計
1.1 矢量控制
在一個電力拖動控制系統中,交流電機在矢量控制的作用下,通過坐標工作象限的轉換方式,將異步電機轉為直流電動機模型。在這一過程中,為了對磁通與轉矩進行解耦控制,交流電機通過一定矢量控制,將定子電流分為兩個直流分量,分量方向由轉子的磁場所決定。在采用電壓源逆變器進行供電時,通過應用空間脈寬矢量控制(SVPWM)技術,能夠實現逆變器開關控制,從而有效提升直流側電源電壓利用效率。而在三相異步電動機控制系統中,我們可以借助TMS 320 LF 2407單片機編程,能實現對PWM波的調制,對電機轉速偏差信號的實時采樣,采用光電編碼器實現,最后通過相應計算來獲得定子電流控制量,從而實現對兩個電流直流分量的矢量控制。在實際進行矢量控制的過程中,電機的轉速可以從零開始,通過進行相應的調速控制,可以使得電動機始終保持較好一個良好穩定的低速運行狀態,在矢量控制的作用下,亦能有效擴大調速范圍,與此同時,還能夠有效提升轉矩控制精準性,并且使其動態響應速度變得更快,最終賦予電動機更為優質的加速性能。因此,在電力拖動控制中利用矢量控制設計,能夠顯著提升系統的低速運行的性能,保障電動機加速的穩定安全性,有效減少故障發生的概率。
1.2 軟件功能設計
電力拖動控制系統的軟件功能呈現主要依賴于兩種程序,一是主程序,二是中斷子程序,具體功能內容如圖1所示,從圖1中我們能夠認識到,主程序實時運行,其功能主要是完成電力拖動控制系統初始化,并對電壓、電流以及轉速進行檢測,同時還具有故障診斷與保護功能。而中斷子程序具有響應及時,運行可靠的特點,將其用于實現對電流環的坐標轉換,能有效提升控制精度,減少中斷時間。
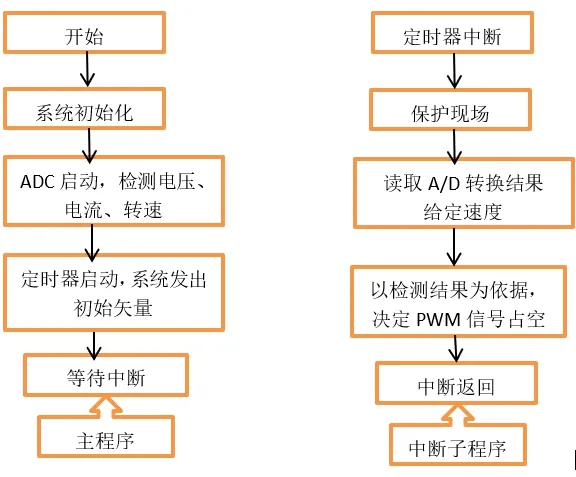
圖1 電力拖動控制系統軟件控制程序功能
2 基于DSP的電力拖動控制系統硬件設計
2.1 電壓和電流
在系統設計時,對電機相電流檢測,需要可采用TBC30P電流傳感器,然后將信號進行放大。在高速雙向二極管的幫助下,先進行限幅控制,然后再輸送至DSP的A/D轉換端,在這一過程中,還需要控制電壓和電流采樣信號的比例,一般為3V-30A。在電壓傳感器LV28-P的幫助下,針對直流母線電壓,可以實現其運行狀態檢測,采樣信號也能進一步放大。通過高速雙向二極管,實現限幅功能,在此基礎上,可以將其輸送至DSP的A/D轉換端,此時,采樣信號將會得到有效控制,變為3~500V。最后,針對IPM,可以對母線電壓進行檢測,并對其進行相應控制,從而全面保障開關管IGBT安全。在此基礎上,在PWM幫助下,做好控制信號的發射,由此能夠得到電動機交流電壓大小,然后即可結合實際,通過檢測控制電流電壓,實現對電動機轉速控制。
2.2 檢測電路
電動機轉速信號的檢測,我們可以選擇TRD-S2000B旋轉編碼器,針對電路形成一個完整的閉環控制。對TMS 320 LF 2407單片機而言,本身具有正交編碼器脈沖電路QEP。結合光電編碼器兩組脈沖相位的幫助,能夠完成對電動機運動方向的判斷。與此同時,還能夠通過進行脈沖數量的記錄,實現對電機具體運動位置的確定。然后進行位置信號的差分處理,就可以活動電機的轉動速度。如果電機處于正轉的狀態,在QEP電路方向之上,檢測出運轉邏輯,并在光電解碼器A相之上,測定出QEP1輸入引腳。而對脈沖序列相位而言,相較于光電解碼器B相QEP2上的脈沖信號,則處于領先的位置。不僅如此,脈沖序列還會產生一個方向信號,通過該信號,我們能夠確定T1定時器方向。而對計數器TICNT而言,則能夠實現遞增計數。在這一過程中,如果電動機出現了反向轉動情況,計數器TICNT也會做出相應改變,實現反向計數。在光電解碼器中進行輸出的信號,可以通過光耦方式,實現光電隔離。
2.3 控制電路
在DSP控制電路中,包含了諸多裝置部件,比如TMS 320 LF 2407單片機、仿真調試接口JTAG、快速光耦TLP550等,在這些裝置部件的作用下,能夠對電動機轉速進行測定,能夠對電壓、電流進行采樣,實現對模型數據的轉化,同時在PID模糊算法幫助下,實現對控制信號的輸出等。在DSP芯片中,TMS 320 LF 2407是電動機控制核心,能夠為電機控制提供高效的信號處理。在TMS 320 LF 2407中,存在有兩個事件管理模塊,他們分別是EVA與EVB。在每個模塊之中,均包含有8個PWM脈寬調制通道,每個通道有16bit信息量,能夠使得PWM輸出對稱或者非對稱波形,最終生成SVPWM電路。不僅如此,通過編程方式,針對PWM死區,我們也能夠自由控制。防止上下橋臂在運轉時,同時輸出脈沖。而在電動機控制時,通過進行PWM控制電路的設計,可減輕CPU運行壓力。另一方面,針對用于同步脈寬調制波形控制軟件,還對其進行了有效的簡化,使其硬件軟件配置數量更少,運行成本更低。
2.4 功率模塊
在電力拖動系統的功率模塊之中,同樣有不同部件組成,比如IPM模塊、濾波電路、不可控整流模塊等,其中對IPM模塊而言,在該模塊內部,一般集成有第五代低功耗的IGBT芯管,除此之外,還包括柵極驅動電路以及檢測電流,不僅如此,自身還具備欠壓、溫度保護、過流等功能。在IPM中,故障輸出信號FO通過光電耦合器進行傳輸,能夠直接連接再回DSP的PDPINTA之中。在IPM出現故障問題時,DSP能夠將相應事件管理器輸出引起設置成為高阻狀態,此時PWM便無法進行信號的輸出,從而達到對電力拖動系統的保護作用。與此同時,在IPM中,要求在同一橋臂上下開關之間,始終存在一個截止,且不同開關之間必須互鎖。基于此,在DSP在發出PMW信號后,應具備充足的死區時間。否則,同一橋臂上下開關之間將會出現同時導通的問題,最終會因此IGBT模塊運行過載,引發燒毀問題。在TMS 320 LF 2407內部,還集成了死區調節電路,在該電路之中,通過死區定時器完成對寄存器DBTCONA調節控制。
在IPM中的IGBT功率管本身能夠起到逆變作用,一般由TMS 320 LF 2407所輸出的六路PMW波進行控制。在功率管的幫助下,通過自身有規律的通斷控制,能夠對直流電進行逆變,使其成為三相交流電,從而為異步電動機運轉提供相應的電能。在DSP運轉過程中,PWM信號一般比較弱,因此在IPM前,需要先放大相應信號。在系統設計中,還采用了不可控整流二極管模塊,在模塊內部,則由三相橋式不可控整流電路組成,濾波電路則由電解電容組成。
2.5 控制模塊
控制模塊是系統的最重要組成部份之一,設計時需要重點考慮,而DSP作為數字信號處理裝置,成為控制模塊設計的核心。在電力拖動系統中,在進行電壓、電流檢測時,主要依靠上述檢測電路來實現。在這些功能的幫助下,能夠促使靜態RAM存儲器實現對數據存儲的擴展。而在IPM控制模塊之中,主要控制功能是將交流電壓轉化為直流電壓,保障異步電動機有著充足的交流電流供應,充分發揮異步電機優秀的變頻調速性能。在電力拖動控制系統的控制模塊中,通過將電流霍爾傳感器TBC30P電路連接在逆變橋另一端,能夠實現線路檢測控制,電流信號在從TBC30P電路中輸出后,會經過控制模塊處理,然后由DSP接收。MAX232單電源電平轉換芯片能夠將DSP與計算機關聯在一起,TMS 320 LF 2407作為一種單片機,能夠對電機進行操控,內部有64k程序控制空間,為了進一步提升控制效果,同時還引入了CMOS靜態存儲器,從而進一步擴大程序內部控制空間,提高傳輸信號控制的效果。
3 結語
綜上所述,本次所設計的電力拖動系統,主要以DSP為基礎,借助了DSP強大的運算能力與數字信號處理能力,同時還利用了DSP各種內外設資源,有效減少了系統的外圍電路,且提升了系統運轉的可靠穩定性。在實際設計過程中,通過引入IPM這種相對比較簡單的逆變電路,能夠有效實現電動機的實時控制,同時也使得系統在整體硬件設計方面更加的簡約,保障了電力拖動系統功能能夠得到充分地發揮與展現,賦予了系統動態響應迅速、實時控制性、高精度性等優點。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25