基于Modelica的挑線機構動態(tài)特性分析
2021-06-29 04:39:08張小康
西部皮革 2021年11期
關鍵詞:模型
張小康
(武漢紡織大學,湖北 武漢 430200)
引言
在工業(yè)平縫機縫制工作中進行面線供給和收緊線圈的機構叫做挑線機構。目前大多數縫紉機挑線機構均采用曲柄搖桿機構,總體機構為一種四連桿機構[1]。現以A 型工業(yè)平縫機作為研究對象,研究挑線機構的動態(tài)特性,包括挑線桿的運動軌跡、挑線力、加速度,這對于平縫機線跡質量的優(yōu)化具有重要意義。
1 Modelica 語言介紹
Modelica 語言是基于非因果建模思想,采用數學方程(組)和面向對象結構來促進模型知識的重用,是一種面向對象的結構化數學建模語言,支持類、繼承、方程、組件、連接器的連接。它采用基于廣義基爾霍夫原理的連接機制進行統(tǒng)一建模,可以滿足多領域需求。涉及領域包括電氣、機械、熱力學、液壓、生物、控制等,并且至今積累了大量可復用的領域庫[2]。
對于基于Modelica 平臺建立的機構物理模型,在多體庫中一般有Frame_a 和Frame_b 連接接口,將Frame_a 和Frame_b 通過組件屬性定義,進而接口定義了組件所有的運動特性,在多體庫的預定義組件中,由關節(jié)、實體及力單元組成,這些組件也是由接口Frame_a 和Frame_b 反映組件與模型仿真中的坐標變換,并以數值可視化體現。
2 挑線機構建模
2.1 挑線機構參數
挑線機構是一種典型的曲柄搖桿機構,其機構桿組圖(如圖1 所示),現以A 點為為原點建立坐標系,假設逆時針方向為正方向,與角速度ω 同向,初始位置為曲柄AB 共線與Y 軸正方向,θ 為曲柄AB 轉動角度。桿組中各桿長度參數(如表1 所示)。
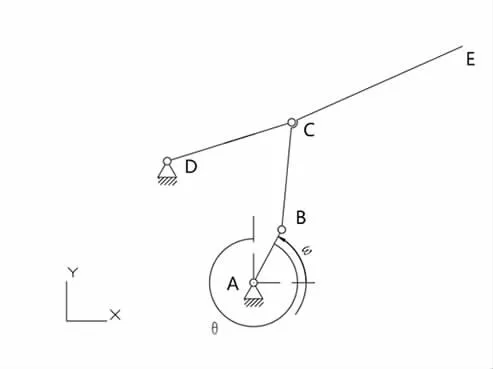
圖1 挑線機構桿組圖
2.2 模型創(chuàng)建
按照表1 中的桿長數據于Modelica 平臺中構建挑線機構物理模型(如圖2 所示),將每一根連桿(BodyBox)對應到相應的連桿,通過轉動副(Revolute)將前者連接,設定主動件的轉速(ConstantSpeed)及機架(FixedRotation)姿態(tài)。
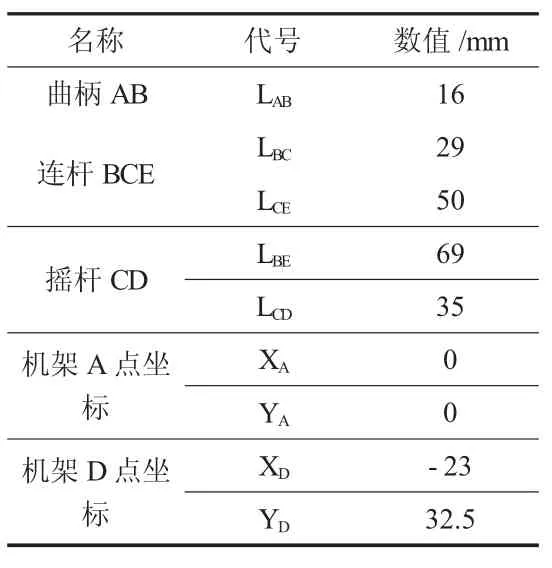
表1 各桿長度及機架點坐標
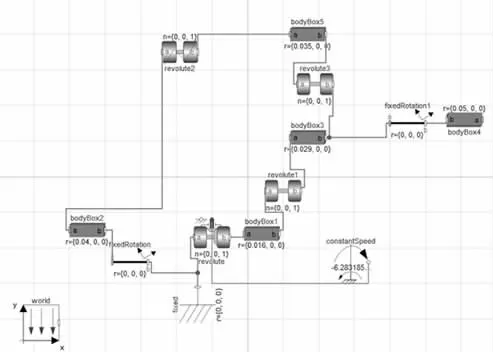
圖2 挑線機構物理模型圖
3 挑線軌跡計算
在利用建立好的物理模型獲得挑線機構挑線軌跡前,先對圖1 桿組圖以圖解法獲得挑線軌跡方程。
以A 點為坐標系原點,則B 點坐標為:

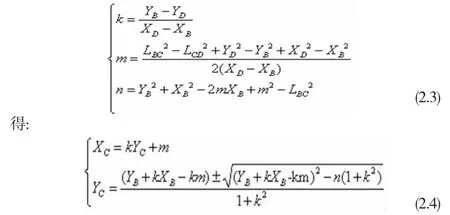
根據機架D 點坐標(-23,32.5),結合連桿LBC、LCD長度條件求解C 點坐標,可得:

由式(2.2)解的(XB≠XD)時,令:
現對各桿件與Y 軸的夾角有:φAB、φBC、φCD
AB 桿:

BC 桿:
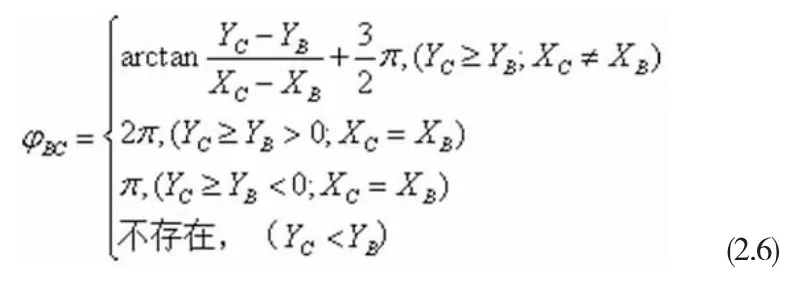
CD 桿:
由連桿BCE 角度關系,根據余弦公式可得:
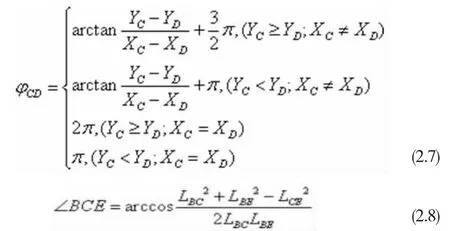
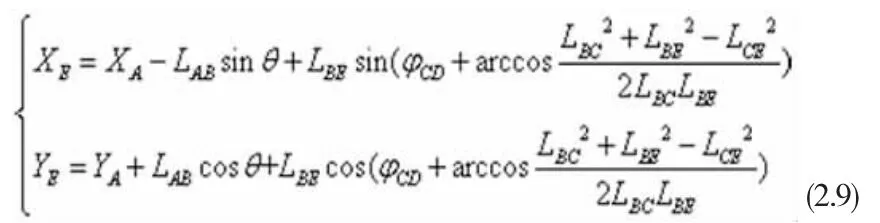
聯立式(2.1)、式(2.5)、式(2.6)、式(2.7)、式(2.8)可得E 點坐標:
通過設定機架A 點坐標,生成挑線環(huán)E 點運動軌跡,即獲得挑線軌跡方程,如圖3 所示。按照挑線軌跡,根據縫紉供線需求,挑線機構分為收線與放線兩個狀態(tài)。在設定平縫機轉速恒定的情況下,按照單位時間面線的需求,為降低斷線率,挑線機構軌跡圖中供線曲線長度相對于收線曲線多出10%~20%[3]。同時挑線機構的面線供線量是根據縫紉線跡長度來確定的,并在此基礎上進行累積,多余的供線通過夾線器來限制,保證線跡質量穩(wěn)定。
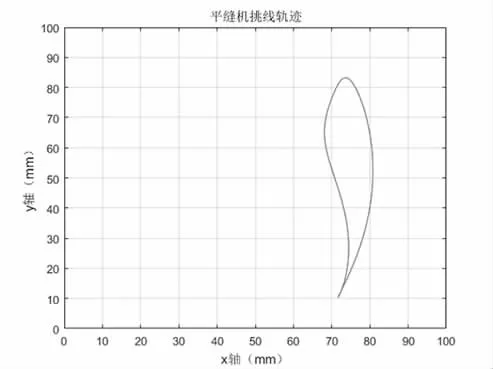
圖3 挑線桿軌跡
4 仿真及結果分析
4.1 仿真結果
通過Modelica 平臺中的多體庫建立的挑線機構物理模型,在仿真求解后建立仿真動畫窗口,選中bodyBox4 顯示其運動軌跡(如圖4 所示)。與圖3 挑線機構挑線軌跡對比驗證。在挑線機構的物理模型的構建中,針對典型的曲柄搖桿機構,四桿機構的桿長條件確定了該機構的運動特性,挑線機構的挑線軌跡一般為柳葉形,觀察其軌跡輪廓,挑線機構具有急回特性并且沒有死點,保證整體傳動機構不會因為并聯其中的部分機構卡死。在縫紉工作進行中,在確定的縫料和線跡條件下,挑線機構所牽引的面線為一個線跡的耗線量,即確定了縫線耗線量與挑線機構結構的耦合性。
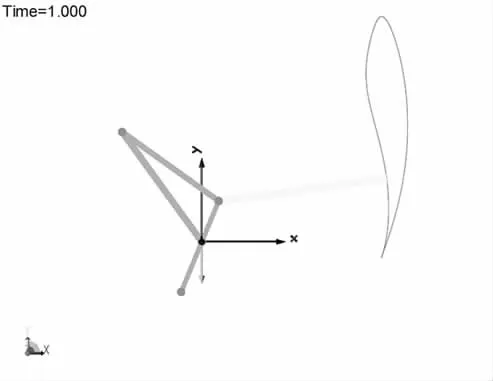
圖4 挑線桿追蹤軌跡
在獲得挑線桿運動軌跡的同時,對挑線桿末端在Y 方向的位移和加速度進行提取,將挑線桿的關于時間的運動特性參數轉換為關于平縫機主軸轉角的運動曲線,(如圖5 所示)。
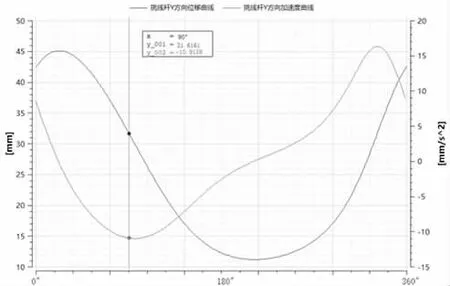
圖5 挑線桿運動曲線
4.2 結果分析
在工業(yè)平縫機的縫制過程中,縫紉質量的優(yōu)劣往往取決于縫制要素的特性。縫制要素包括:縫線、縫針、縫料。而挑線機構的作用對象為縫線,則縫線特性與挑線機構的動態(tài)特性相互耦合。
縫線特性的影響因素很多,就縫線張力而言,縫線張力的影響因素主要分為三點,包括挑線機構在縫制工作中的面線供線和收線作用、縫線-面線的過線道設計及縫線自身的物理特性[4]。
在計算縫線受到挑線桿作用而產生的慣性力時,需要得到縫線在挑線作用下的豎直Y 方向的速度,或者挑線桿在Y 方向的加速度αy,(如圖5 所示)。挑線桿開始向下,加速度達到最低值αymin。假設面線所受慣性力為Pz,挑線桿所收面線質量為mz。因為面線是經過挑線孔來實現收線的,所以面線的速度也是挑線桿速度的兩倍,則有慣性力:

對于挑線桿所收面線質量mz:

則聯立式(4.1)、式(4.2)可得面線的慣性力Pz:

面線的長度lz 可以近似認為是挑線桿的Y 方向位移、X 方向位移和挑桿孔到旋梭的距離之和,lz=353x10-3m,縫紉機轉速設定為4000 r/min,帶入式(4.3)可得:

因此,縫線在縫制過程中會存在有不可忽視的慣性力,影響到縫線特性,如縫線張力,造成這一影響的因素為挑線桿的速度變化。
5 結語
本文從工業(yè)平縫機挑線機構的整體機構組成出發(fā),利用Modelica 平臺完成了挑線機構的物理模型建模與仿真分析,對比理論計算結果,獲得了該機構的相關運動學數據。結合其運動規(guī)律,驗證了縫線在挑線機構作用下特性出現變化的潛在因素。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19