135MW機(jī)組DEH控制系統(tǒng)改造概論
——以寧波鋼鐵余能發(fā)電廠為例
2021-06-29 12:36:54崔世軍
科學(xué)與信息化 2021年16期
崔世軍
艾默生過(guò)程控制有限公司 上海 200438
引言
寧波鋼鐵余能發(fā)電廠135MW機(jī)組是南京汽輪電機(jī)(集團(tuán))有限責(zé)任公司制造的N135-13.24/535/535型中間再熱凝汽式汽輪機(jī)。原設(shè)計(jì)采用Eurotherm的T2550[1]系統(tǒng)。通過(guò)T2550R(IOC modules)冗余模塊及2500M(I/O modules)組件實(shí)現(xiàn)對(duì)DEH的控制。此系統(tǒng)于2011年投入運(yùn)行。因服務(wù)器硬件、工程師站硬件、操作員站硬件、操作系統(tǒng)版本、CPU模塊、I/O模塊已無(wú)法獲取支持,也無(wú)法獲取備件,因而面臨巨大的支持和維護(hù)困難等問(wèn)題,導(dǎo)致系統(tǒng)的安全性和穩(wěn)定性下降,長(zhǎng)期運(yùn)行的風(fēng)險(xiǎn)越來(lái)越大。通過(guò)這次改造使用Ovation工業(yè)控制系統(tǒng),其優(yōu)點(diǎn)在于控制器處理能力強(qiáng),I/O模塊采集精度高,支持熱拔插,軟件功能強(qiáng)大,歷史數(shù)據(jù)及存儲(chǔ)容量大,系統(tǒng)維護(hù)和診斷功能完善,DEH操作畫面友好,具有完善的備品備件支持,提高了DEH控制系統(tǒng)的安全性和穩(wěn)定性。
1 控制器與I/O模件電源設(shè)計(jì)
對(duì)原系統(tǒng)的供電原理圖進(jìn)行解讀和供電范圍確認(rèn)后,根據(jù)不同用戶的電源等級(jí)及其重要性進(jìn)行分類和優(yōu)化。原系統(tǒng)電源設(shè)計(jì)只有DEH控制器側(cè)是冗余電源,服務(wù)器及工程師站為單路電源。通過(guò)這次改造為服務(wù)器及工程師站增設(shè)一路電源,防止服務(wù)器意外掉電而丟失數(shù)據(jù)。改造后電源設(shè)計(jì)按DEH控制器與I/O模件劃分,設(shè)計(jì)一路UPS段和一路保安段的220VAC電源,計(jì)算電源容量后,設(shè)計(jì)與之匹配的兩路總電源空開。兩路電源通過(guò)獨(dú)立的子空開分別為DEH控制器、交換機(jī)、服務(wù)器、工程師站等提供可靠的電源,確保當(dāng)任意一路電源丟失時(shí),對(duì)運(yùn)行的控制系統(tǒng)不會(huì)造成影響。
2 電磁閥電源設(shè)計(jì)
原系統(tǒng)的供電原理圖中高壓主氣門試驗(yàn)電磁閥、中壓主氣門試驗(yàn)電磁閥為單路保安段220VAC電源,兩個(gè)OPC電磁閥共用一路220VDC電源。改造后新增一路UPS段220VAC電源與原保安段220VAC電源冗余后給高壓主氣門試驗(yàn)電磁閥、中壓主氣門試驗(yàn)電磁閥供電。兩個(gè)OPC電磁閥改為220VAC類型,分別設(shè)計(jì)在兩路冗余220VAC切換裝置后。220VDC掛閘電磁閥在機(jī)組啟動(dòng)前得電10s或安全油壓已建立后自動(dòng)失電,不會(huì)對(duì)運(yùn)行時(shí)的機(jī)組產(chǎn)生影響。因此保留原有設(shè)計(jì)。電源子空開容量經(jīng)過(guò)現(xiàn)場(chǎng)核實(shí)后,按實(shí)際瓦數(shù)要求設(shè)計(jì)。
3 第三方接口模件電源設(shè)計(jì)
原系統(tǒng)的供電原理圖中Shizhong-LTM-3A、ProTech2o3、DDV閥均為冗余24VDC供電設(shè)計(jì),改造以后是雙冗余24VDC供電增加了可靠性。原系統(tǒng)個(gè)別子空開的容量大于上級(jí)空開,當(dāng)下級(jí)設(shè)備故障時(shí)會(huì)導(dǎo)致上級(jí)空開先跳閘。因此電源子空開容量經(jīng)過(guò)現(xiàn)場(chǎng)重新核實(shí)后,按實(shí)際瓦數(shù)要求設(shè)計(jì)。
4 網(wǎng)絡(luò)架構(gòu)圖
Ovation工業(yè)控制系統(tǒng)的網(wǎng)絡(luò)架構(gòu)是基于一對(duì)互連以實(shí)現(xiàn)冗余的根交換機(jī)進(jìn)行設(shè)計(jì)的。這對(duì)交換機(jī)形成網(wǎng)絡(luò)樹的根。控制器、服務(wù)器、工程師站、操作員站均通過(guò)這對(duì)冗余的根交換機(jī)與網(wǎng)絡(luò)中的其他用戶進(jìn)行數(shù)據(jù)傳輸。當(dāng)任意一臺(tái)交換機(jī)故障后,另一臺(tái)交換機(jī)會(huì)作為主交換機(jī)繼續(xù)為整個(gè)網(wǎng)絡(luò)的數(shù)據(jù)進(jìn)行傳輸服務(wù)。同樣控制器、服務(wù)器、工程師站、操作員站與根交換機(jī)的連接方式也采用了冗余網(wǎng)卡及OHI[2]軟件技術(shù),這樣保證了控制系統(tǒng)網(wǎng)絡(luò)的安全性、穩(wěn)定性。這次改造新增加的DEH控制器、工程師站、操作員站并入原根交換機(jī)的備用端口。在接入設(shè)備前通過(guò)3級(jí)命令登錄根交換機(jī)的備用端口,檢查端口狀態(tài),確保正常后,再進(jìn)行連接。
5 信號(hào)及卡件布局
改造后的Ovation控制系統(tǒng)按照DEH控制工藝分為OA功能及AUX功能。因此卡件布局將按照工藝要求進(jìn)行設(shè)計(jì)。消化現(xiàn)場(chǎng)資料時(shí)發(fā)現(xiàn)實(shí)際控制器中運(yùn)行的信號(hào)與資料中的信號(hào)個(gè)數(shù)、類型不完全一致,需將清冊(cè)初版整理完成后與實(shí)際控制器中的信號(hào)進(jìn)行逐一比較、核對(duì),經(jīng)過(guò)郵件、電話會(huì)議確認(rèn),達(dá)成客戶認(rèn)可的最終版清冊(cè)。在設(shè)計(jì)新I/O卡件布局時(shí),發(fā)現(xiàn)EurothermT2550機(jī)柜原外部電纜均布局在反面,而改造后的機(jī)柜布局是前、后兩個(gè)面,4條分支,因此需要將外部電纜拆分到前、后兩個(gè)面,4條分支上。但是原電纜是需要保留的,其長(zhǎng)度也是固定的,接下來(lái)就需要將老的電纜放入新的I/O卡件布局中,由于橋架內(nèi)電纜走線錯(cuò)綜復(fù)雜,長(zhǎng)短不一致,就需要憑借自己多年工作積累的經(jīng)驗(yàn)并根據(jù)現(xiàn)場(chǎng)實(shí)際情況,將最短的電纜布局在盡量靠下方卡件的位置處,最長(zhǎng)的電纜布局在盡量靠中間卡件的位置處,改造新增設(shè)的電纜由于是重新布線,因此不考慮長(zhǎng)度不夠的問(wèn)題,均布局在盡量靠上方卡件的位置處。新的電纜布局已經(jīng)解決,但是原電纜中同一類型的3個(gè)重要保護(hù)信號(hào)需要單獨(dú)篩選出來(lái),布置在前、后不同的分支上,可以避免單個(gè)分支故障而導(dǎo)致信號(hào)誤動(dòng)作。最后考慮模件通道裕量等綜合因素。
6 第三方接口設(shè)計(jì)
D D V[3]閥是安裝在油動(dòng)機(jī)模塊上的一個(gè)電液轉(zhuǎn)換裝置,是控制閥門動(dòng)作的關(guān)鍵核心部件。其接口包括:供電UA=+24VDC、指令±10V、閥芯反饋4-20ma,同時(shí)外部還設(shè)計(jì)有6線制LVDT反饋裝置,參與閥門的閉環(huán)調(diào)節(jié)。DEH控制系統(tǒng)改造后使用VP[4]卡控制DDV閥,形成串級(jí)回路。將DDV閥、VP卡、6線制LVDT反饋裝置進(jìn)行正確接線,滿足DEH掛閘條件并建立安全油壓,投入EH油蓄能器裝置,投入EH油聯(lián)鎖裝置,EH油壓達(dá)到14.5±0.5MPa,油溫達(dá)到35℃左右時(shí),進(jìn)行接口測(cè)試。將VP卡指令、VP卡電壓、6線制LVDT進(jìn)行組態(tài)并配置歷史曲線。如下圖數(shù)據(jù)曲線:紅色是VP卡指令信號(hào),藍(lán)色是油動(dòng)機(jī)行程反饋信號(hào),綠色是伺服電壓信號(hào)。通過(guò)工程師站下裝VP卡初始參數(shù)后進(jìn)行油動(dòng)機(jī)校驗(yàn)。從校驗(yàn)趨勢(shì)可以看出16:33:15時(shí)指令在0%,反饋在25%。16:33:25時(shí)指令增至25%與反饋基本一致,時(shí)間間隔10s。查閱DDV633型手冊(cè),其閥芯在0-100%行程的響應(yīng)時(shí)間是小于15ms與趨勢(shì)中10s間隔相差很大。查閱I/O Reference Manual手冊(cè),VP卡初始校驗(yàn)時(shí)會(huì)通過(guò)測(cè)試伺服電壓的增益保證其不會(huì)超出電壓工作范圍,然后根據(jù)指令與反饋偏差調(diào)整輸出電壓使其偏差為零。因此10s后伺服電壓的增益與DDV閥電氣特性完全匹配后滿足其快速響應(yīng)特性。從趨勢(shì)來(lái)看16:33:25后反饋立刻跟隨指令并無(wú)滯后現(xiàn)場(chǎng)。

圖1 VP卡與DDV閥接口初步試驗(yàn)曲線
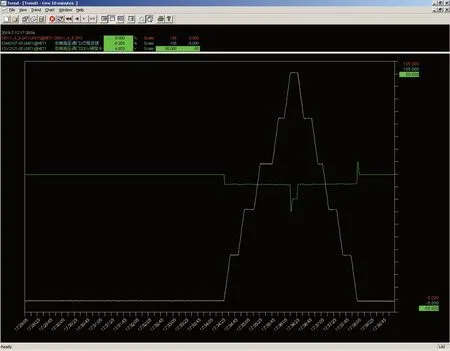
圖2 VP卡與DDV閥接口最終試驗(yàn)曲線
初步試驗(yàn)完后進(jìn)行階躍測(cè)試。從曲線上分析,當(dāng)指令向上20%階躍響應(yīng)時(shí),反饋立刻跟隨指令并且無(wú)超調(diào)現(xiàn)象。當(dāng)指令向下20%階躍響應(yīng)時(shí),反饋立刻跟隨指令并且有0.8%超調(diào)現(xiàn)象。調(diào)節(jié)比例參數(shù)由6至5,積分參數(shù)由9000至8000后再做階躍響應(yīng)測(cè)試無(wú)超調(diào)現(xiàn)象。機(jī)組實(shí)際運(yùn)行時(shí)階躍量一般不超過(guò)4%。當(dāng)指令穩(wěn)定在某一開度時(shí),反饋完全跟隨指令。以上兩點(diǎn)滿足動(dòng)態(tài)和靜態(tài)響應(yīng)特性。
7 DEH組態(tài)設(shè)計(jì)
DEH的組態(tài)設(shè)計(jì)是完全解讀原邏輯的控制原理并根據(jù)現(xiàn)場(chǎng)實(shí)際所用的工藝使用Ovation控制系統(tǒng)的軟件來(lái)實(shí)現(xiàn)其功能。主要包括DEH運(yùn)行方式,控制回路,試驗(yàn)回路,保護(hù)回路等。
7.1 DEH的運(yùn)行方式[5]
DEH的運(yùn)行方式細(xì)分為以下兩種方式且兩種方式之間的切換是無(wú)擾的。
操作員自動(dòng)方式(OA)
操作員自動(dòng)控制方式是最基本、最常用的控制方式。在此方式下,操作員通過(guò)畫面對(duì)目標(biāo)轉(zhuǎn)速、目標(biāo)負(fù)荷、升速率、降速率、升負(fù)荷率、降負(fù)荷率進(jìn)行設(shè)定,從而實(shí)現(xiàn)DEH的轉(zhuǎn)速控制及負(fù)荷控制。
手動(dòng)方式(OM)
此方式是在退出操作員自動(dòng)方式后由操作員在手動(dòng)操作面板上控制各個(gè)閥門開度的一種運(yùn)行方式。
7.2 轉(zhuǎn)速控制回路
在操作員自動(dòng)方式下,由操作員進(jìn)行轉(zhuǎn)速目標(biāo)值、升速率、降速率的設(shè)定。當(dāng)操作員輸入的轉(zhuǎn)速目標(biāo)值在汽輪機(jī)臨界轉(zhuǎn)速區(qū)域內(nèi),那么這個(gè)目標(biāo)值是無(wú)效的。當(dāng)目標(biāo)值設(shè)定完畢且有效后通過(guò)點(diǎn)擊畫面按鈕,此時(shí)設(shè)定值會(huì)按照先前設(shè)定的速率向目標(biāo)值靠攏。當(dāng)設(shè)定值等于目標(biāo)值后,自動(dòng)變?yōu)楸3譅顟B(tài),通過(guò)轉(zhuǎn)速控制回路使汽輪機(jī)維持當(dāng)前設(shè)定轉(zhuǎn)速。當(dāng)轉(zhuǎn)速通過(guò)汽輪機(jī)的臨界轉(zhuǎn)速區(qū)時(shí),升速率自動(dòng)變?yōu)?00rpm/min,并且不能進(jìn)行保持操作。當(dāng)轉(zhuǎn)速超過(guò)汽輪機(jī)的臨界轉(zhuǎn)速區(qū)后,升速率自動(dòng)變?yōu)橄惹霸O(shè)定的升速率值。若不在臨界轉(zhuǎn)速區(qū)內(nèi),操作員可通過(guò)點(diǎn)擊畫面按鈕進(jìn)行設(shè)定值的保持。
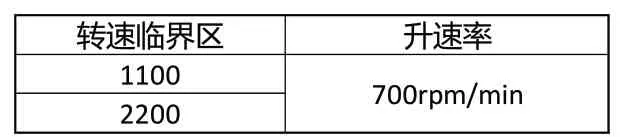
表1 轉(zhuǎn)速臨界區(qū)
7.3 同期控制回路
并網(wǎng)前,當(dāng)GV&IV控制轉(zhuǎn)速到3000轉(zhuǎn)時(shí),DEH接受來(lái)自同期裝置請(qǐng)求信號(hào),操作員點(diǎn)擊畫面投入“同期控制”,此時(shí)根據(jù)同期裝置的增、減同期信號(hào)來(lái)改變DEH的轉(zhuǎn)速設(shè)定值,使DEH增轉(zhuǎn)速、減轉(zhuǎn)速,直到滿足并網(wǎng)要求。
7.4 主汽門、調(diào)門嚴(yán)密性試驗(yàn)回路
并網(wǎng)前,當(dāng)GV&IV控制轉(zhuǎn)速到3000轉(zhuǎn)時(shí),可進(jìn)行主汽門的嚴(yán)密性試驗(yàn)。在操作員自動(dòng)方式下,由操作員通過(guò)點(diǎn)擊畫面“主機(jī)閥試驗(yàn)”窗口進(jìn)行主汽門嚴(yán)密性試驗(yàn),此時(shí)TV、RSV全關(guān),轉(zhuǎn)速開始下降,通過(guò)預(yù)設(shè)判斷條件當(dāng)轉(zhuǎn)速降到:1000*當(dāng)前主汽壓力/額定主汽壓力時(shí),記錄惰走時(shí)間,試驗(yàn)合格。
并網(wǎng)前,當(dāng)GV&IV控制轉(zhuǎn)速到3000轉(zhuǎn)時(shí),可進(jìn)行調(diào)門的嚴(yán)密性試驗(yàn)。在操作員自動(dòng)方式下,由操作員通過(guò)點(diǎn)擊畫面“主機(jī)閥試驗(yàn)”窗口進(jìn)行調(diào)門嚴(yán)密性試驗(yàn),此時(shí)GV、IV全關(guān),轉(zhuǎn)速開始下降,通過(guò)預(yù)設(shè)判斷條件當(dāng)轉(zhuǎn)速降到:1000*當(dāng)前主汽壓力/額定主汽壓力時(shí),記錄惰走時(shí)間,試驗(yàn)合格。
7.5 負(fù)荷控制回路
并網(wǎng)后,DEH由轉(zhuǎn)速控制回路自動(dòng)轉(zhuǎn)變?yōu)樨?fù)荷控制回路。在操作員自動(dòng)方式下,由操作員進(jìn)行負(fù)荷目標(biāo)值、升負(fù)荷率、降負(fù)荷率的設(shè)定。此時(shí)負(fù)荷控制均由GV&IV完成。當(dāng)目標(biāo)值設(shè)定完畢且有效后,通過(guò)點(diǎn)擊畫面“確認(rèn)”按鈕,此時(shí)設(shè)定值會(huì)按照先前設(shè)定的速率向目標(biāo)值靠攏。當(dāng)設(shè)定值等于目標(biāo)值后,自動(dòng)變?yōu)楸3譅顟B(tài)。若需要保持當(dāng)前設(shè)定值,操作員可通過(guò)點(diǎn)擊畫面“保持”按鈕進(jìn)行設(shè)定值的保持。
7.6 OPC保護(hù)回路
當(dāng)發(fā)電機(jī)GCB開關(guān)分閘時(shí),且轉(zhuǎn)速超過(guò)103%,即3090rpm時(shí),會(huì)觸發(fā)OPC保護(hù)動(dòng)作,關(guān)閉GV、IV,直到轉(zhuǎn)速低于3030rpm,復(fù)位OPC動(dòng)作。若發(fā)電機(jī)GCB開關(guān)分閘時(shí),實(shí)際負(fù)荷大于40MW時(shí),也會(huì)觸發(fā)OPC保護(hù)動(dòng)作,關(guān)閉GV、IV,直到轉(zhuǎn)速低于3030rpm,復(fù)位OPC動(dòng)作。從而達(dá)到保護(hù)機(jī)組安全性的作用。
7.7 超速保護(hù)回路
DEH超速保護(hù)回路是通過(guò)采集現(xiàn)場(chǎng)3個(gè)獨(dú)立的轉(zhuǎn)速探頭信號(hào),通過(guò)邏輯中高定值3300模塊判斷后,送出DO信號(hào)去ETS系統(tǒng),實(shí)現(xiàn)超速保護(hù)。當(dāng)任意一路超速定值動(dòng)作時(shí),不會(huì)觸發(fā)ETS跳閘,當(dāng)3個(gè)超速定值有2個(gè)動(dòng)作時(shí),觸發(fā)ETS跳閘,這樣即防止拒動(dòng),又防止誤動(dòng)。
7.8 閥門活動(dòng)試驗(yàn)回路
為防止閥門卡澀,DEH控制回路中設(shè)有TV、GV、IV、RSV閥門的活動(dòng)性試驗(yàn)。根據(jù)實(shí)際需要進(jìn)行相應(yīng)的試驗(yàn)。當(dāng)操作員投入TV、IV閥門的松動(dòng)試驗(yàn)時(shí),對(duì)應(yīng)的閥門會(huì)關(guān)到90%,然后自動(dòng)恢復(fù)到原來(lái)的位置。當(dāng)操作員投入某個(gè)GV閥門的松動(dòng)試驗(yàn)時(shí),對(duì)應(yīng)的閥門會(huì)關(guān)到20%,然后恢復(fù)到原來(lái)的位置。當(dāng)操作員投入IV閥門的松動(dòng)試驗(yàn)時(shí),任意中調(diào)門反饋小于95%后試驗(yàn)結(jié)束,然后恢復(fù)到原來(lái)的位置。
7.9 單、順序閥切換回路
根據(jù)進(jìn)汽方式不同,DEH可分為單閥方式下的全周進(jìn)汽及順序閥方式下的部分進(jìn)汽。操作員可以在畫面上點(diǎn)擊“閥切換”進(jìn)行切換。切換過(guò)程以每秒0.008的速率由單閥控制切換到順序閥控制方式。當(dāng)切換完畢后,所有GVs根據(jù)各自的開啟順序函數(shù)及順序閥函數(shù)維持各自的開度。
7.1 0 操作畫面
DEH主畫面包含了轉(zhuǎn)速,負(fù)荷,主汽壓力,閥位反饋,閥位指令,當(dāng)前運(yùn)行方式,子回路投入的全部狀態(tài)。同時(shí)包含了操作DEH從啟動(dòng)到帶滿負(fù)荷的所有操作窗口。主要包含:汽機(jī)掛閘、汽機(jī)轉(zhuǎn)速控制、機(jī)組啟動(dòng)、同期控制、主汽壓力控制、閥位控制、負(fù)荷控制、負(fù)荷控制投切、閥位限制器、主汽壓力限制器、頻率限制器、主汽閥試驗(yàn)、閥切換、主機(jī)超速試驗(yàn)、摩擦試驗(yàn)。

圖3 DEH操作畫面
7.1 1 監(jiān)視畫面
DEH監(jiān)視畫面包含了汽輪機(jī)沖轉(zhuǎn)過(guò)臨界區(qū)域的轉(zhuǎn)速監(jiān)視、報(bào)警。運(yùn)行過(guò)程中的軸系振動(dòng)、軸位移、偏心、高低壓缸脹差、絕對(duì)膨脹的監(jiān)視。運(yùn)行過(guò)程中每個(gè)瓦溫度的監(jiān)視。根據(jù)經(jīng)驗(yàn)將重要參數(shù)合入這個(gè)畫面,極大程度的方便運(yùn)行人員監(jiān)視。

圖4 DEH監(jiān)視畫面
8 結(jié)束語(yǔ)
寧波鋼鐵余能發(fā)電廠135MW機(jī)組DEH控制系統(tǒng)改造項(xiàng)目于2019年08月正式投入運(yùn)行。改造后DEH轉(zhuǎn)速控制的穩(wěn)定性和準(zhǔn)確性均有較大提升。DEH各項(xiàng)試驗(yàn)均全部通過(guò)并在此基礎(chǔ)上對(duì)閥門控制進(jìn)行優(yōu)化。同時(shí)Ovation控制器處理能力強(qiáng),模件采集精度高,軟件功能強(qiáng)大,網(wǎng)絡(luò)結(jié)構(gòu)冗余,具有完善的備品備件支持,提高了DEH控制系統(tǒng)的安全性和穩(wěn)定性。可以為同類型機(jī)組的控制系統(tǒng)改造提供實(shí)際參考價(jià)值及應(yīng)用價(jià)值。2020年10月在江蘇中煤大屯電廠成功改造類似機(jī)組DEH控制系統(tǒng)并已投入運(yùn)行。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
流程工業(yè)(2022年3期)2022-06-23 09:41:08
煤氣與熱力(2021年3期)2021-06-09 06:16:18
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測(cè)試(2018年18期)2018-11-14 02:30:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中學(xué)科技(2014年11期)2014-12-25 07:38:53
太空探索(2014年3期)2014-07-10 14:59:39
