特征結(jié)構(gòu)配置法在無(wú)人機(jī)控制系統(tǒng)中的應(yīng)用研究*
2021-06-29 11:00:10于海生龍飛虎董義兵
科技創(chuàng)新與應(yīng)用 2021年17期
于海生,呂 卉,龍飛虎,董義兵
(尚良仲毅(沈陽(yáng))高新科技有限公司/遼寧省產(chǎn)業(yè)技術(shù)研究院無(wú)人機(jī)研究所,遼寧 沈陽(yáng)110000)
從本質(zhì)上來(lái)說(shuō)在過(guò)去的很長(zhǎng)一段時(shí)間內(nèi)使用極點(diǎn)配置控制系統(tǒng)屬于線性系統(tǒng)一種,線性系統(tǒng)的時(shí)域性特征能夠根據(jù)指標(biāo)要求轉(zhuǎn)化為期望極點(diǎn),然后通過(guò)定位期望極點(diǎn)實(shí)現(xiàn)狀態(tài)反饋、輸出反饋、極點(diǎn)配置等。這種邏輯思路存在明顯的局限性,當(dāng)使用不同的方法求解時(shí)極點(diǎn)可能處于不同的狀態(tài)增益,簡(jiǎn)單來(lái)說(shuō)極點(diǎn)配置的運(yùn)行邏輯不具有唯一性,很容易受到其他因素干擾而出現(xiàn)偏差。
特征結(jié)構(gòu)則是一種以閉環(huán)系統(tǒng)的極點(diǎn)為核心的控制邏輯,可以同時(shí)配置重?cái)?shù)和特征向量,從而將極點(diǎn)的方向、距離信息固定化,這種控制邏輯穩(wěn)定性更強(qiáng),當(dāng)選取參數(shù)恰當(dāng)時(shí),則可以達(dá)到期望性能狀態(tài)下的控制。
本文對(duì)特征結(jié)構(gòu)配置法的無(wú)人機(jī)飛控系統(tǒng)控制律進(jìn)行了探討,對(duì)該飛控系統(tǒng)中的極點(diǎn)和特征向量配置進(jìn)行探究,分析該系統(tǒng)模態(tài)的解耦。
1 特征結(jié)構(gòu)配置法概念
特征結(jié)構(gòu)配置的起源較早,早在中世紀(jì)就有科學(xué)家提出了特征結(jié)構(gòu)配置的概念,在后續(xù)的物理研究中特征結(jié)構(gòu)配置法大放異彩。瑞利爵士在對(duì)振動(dòng)弦和聲音在空氣中的傳播路徑的動(dòng)力學(xué)特征進(jìn)行研究時(shí),以拉格朗日和哈密爾頓原理為基礎(chǔ)總結(jié)了一種處理空氣動(dòng)力系統(tǒng)中各種模態(tài)和頻率的工具,其是一種廣義坐標(biāo)概念,就是將振動(dòng)系統(tǒng)響應(yīng)都解析呈一系列振型和頻率,從而得到一種可以描述空氣動(dòng)力學(xué)特征的線性時(shí)變可控和可觀系統(tǒng),在結(jié)合相關(guān)物理學(xué)一般規(guī)律和數(shù)學(xué)理論,其得到了一個(gè)狀態(tài)方程,即:X=aX+bU和y=cX+dU,這就是特征結(jié)構(gòu)配置法的最初形態(tài),也是特征結(jié)構(gòu)配置法的核心方程。
2 無(wú)人機(jī)飛控的特征結(jié)構(gòu)配置
2.1 特征結(jié)構(gòu)配置分析
無(wú)人機(jī)飛控特征結(jié)構(gòu)配置的線性系統(tǒng)狀態(tài)方程可表示為:
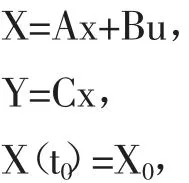
其中A是無(wú)人機(jī)飛控系統(tǒng)的狀態(tài)陣,其反饋的是飛控系統(tǒng)固有的運(yùn)動(dòng)特性;B是無(wú)人機(jī)飛控系統(tǒng)的控制陣,其反饋的是輸入量對(duì)飛控系統(tǒng)運(yùn)動(dòng)狀態(tài)的影響特征;C是無(wú)人機(jī)飛控系統(tǒng)的輸出陣,其反饋的是輸入量進(jìn)入系統(tǒng)后會(huì)以怎樣的狀態(tài)輸出;x是系統(tǒng)的運(yùn)行狀態(tài)向量,u為系統(tǒng)的輸入向量,y為系統(tǒng)的輸出向量,X0為系統(tǒng)的初始值,t0為系統(tǒng)的初始時(shí)間。當(dāng)B為0時(shí),此時(shí)無(wú)人機(jī)將處于t0時(shí)刻的狀態(tài),其飛行狀態(tài)將維持初始值不變,正常狀態(tài)下可求得上述系統(tǒng)的解為X(t)=eAtx0,如果使用A的特征向量和特征值來(lái)表示上述飛控系統(tǒng)的狀態(tài)方程,那么可得AV=Vλ(注:V=[V1……V2……Vn],λ=[λ1……λ2……λn]),對(duì)該狀態(tài)方程可做以下解讀:V表示特征向量,其是狀態(tài)空間的集合,包含所有系統(tǒng)特征向量線性組合的集合,在特征結(jié)構(gòu)配置的無(wú)人機(jī)飛控系統(tǒng)中可將其統(tǒng)稱為右特征向量。與之相對(duì)的還存在左特征向量,使用W表示左特征向量,W的特點(diǎn)、特征、現(xiàn)實(shí)意義與V一致,只是在方向上相反,同時(shí)滿足AW=Wλ(注:W=[W1……W2……Wn],λ=[λ1……λ2……λn])。
特征結(jié)構(gòu)配置法下的無(wú)人機(jī)飛控系統(tǒng)的時(shí)域相應(yīng)方程可以表示為以下形式:

上述的方程提示了特征結(jié)構(gòu)配置法下無(wú)人機(jī)飛控系統(tǒng)的自由響應(yīng)實(shí)現(xiàn)路徑,也明確了三個(gè)關(guān)鍵量,即響應(yīng)相關(guān)速率的特征值、響應(yīng)形狀的特征向量、自由響應(yīng)的初始狀態(tài)。這個(gè)方程描述了輸入值進(jìn)入到系統(tǒng)后,特征值的響應(yīng)特征,包含了特征向量和外作用輸入影響狀態(tài)的過(guò)渡過(guò)程,簡(jiǎn)單來(lái)說(shuō)就是提示了時(shí)域相應(yīng)對(duì)無(wú)人機(jī)運(yùn)動(dòng)模態(tài)的外作用輸出。
2.2 輸出反饋特征結(jié)構(gòu)配置
特征結(jié)構(gòu)配置法下的無(wú)人機(jī)飛控系統(tǒng)所塑造的期望是一種閉環(huán)特征,當(dāng)輸入一個(gè)特征值λ時(shí),得到輸出反饋。
以特征結(jié)構(gòu)配置法為基礎(chǔ),結(jié)合實(shí)際工作邏輯,簡(jiǎn)化后可得控制律方程:u=Ly。其中K表示反饋增益矩陣,同時(shí)使用x=(A+BKC)x表示閉環(huán)方程,輸入特征值λ1得到方程V1=(λ1l-A)-1BKCV1;現(xiàn)在假定系統(tǒng)的期望特征值λ和狀態(tài)矩陣A的特征值并不對(duì)等,那么此時(shí)的(λ1l-A)就是一個(gè)逆存在。在特征向量假設(shè)成立的前提下,反向可解V1=N1z1。特征向量V1必須位于N的列張成的子空間中,一旦期望的特征值已確定,N的分布空間便限定了閉環(huán)特征向量的選取。而期望的特征向量不屬于預(yù)先規(guī)定的子空間而不能到達(dá),此時(shí)需用最可能到達(dá)的特征向量來(lái)代替理想特征向量V。該可達(dá)向量(理想化特征向量)是在N的列張成的子空間上的投影,使所求的特征向量盡可能靠近期望的特征向量。
3 無(wú)人機(jī)縱向運(yùn)動(dòng)控制律邏輯
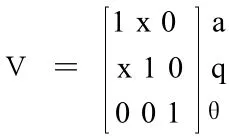
無(wú)人機(jī)的縱向運(yùn)動(dòng)模態(tài)可分為兩個(gè)縱向短周期、一個(gè)縱向長(zhǎng)周期,期望每個(gè)模態(tài)起主導(dǎo)作用的分別是攻角、俯仰角速率和俯仰角,期望特征向量為:
運(yùn)用輸出反饋特征結(jié)構(gòu)配置方法得到的無(wú)人機(jī)俯仰姿態(tài)保持系統(tǒng)的反饋增益矩陣:K=[-0.78972.12045.3293]。
4 無(wú)人機(jī)橫側(cè)向控制律邏輯
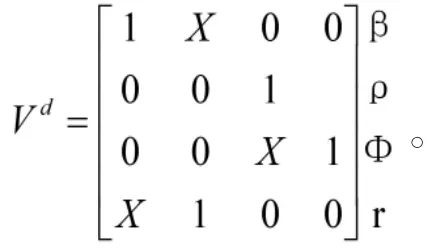
參考縱向控制律邏輯,對(duì)特征結(jié)構(gòu)配置法下無(wú)人機(jī)飛控的橫向控制律邏輯進(jìn)行解析,無(wú)人機(jī)橫側(cè)向運(yùn)動(dòng)模態(tài)可分解為滾轉(zhuǎn)、螺旋、荷蘭滾三種形式,其中荷蘭滾有兩種模態(tài),上述運(yùn)動(dòng)模態(tài)以側(cè)滑角、滾轉(zhuǎn)角速率、滾轉(zhuǎn)角和偏航角速率為主導(dǎo),特征向量可做以下構(gòu)建:
運(yùn)用輸出反饋特征結(jié)構(gòu)配置方法得到的無(wú)人機(jī)俯橫側(cè)向姿態(tài)運(yùn)動(dòng)系統(tǒng)的反饋增益矩陣:

5 無(wú)人機(jī)運(yùn)動(dòng)飛控測(cè)試及結(jié)果
5.1 縱向運(yùn)動(dòng)測(cè)試
前文已經(jīng)提到特征結(jié)構(gòu)配置法中無(wú)人機(jī)飛控縱向運(yùn)動(dòng)的主導(dǎo)因素為攻角、俯仰角速率和俯仰角,因此從邏輯上來(lái)說(shuō)從對(duì)上述三個(gè)主導(dǎo)因素進(jìn)行調(diào)整后無(wú)人機(jī)的縱向運(yùn)動(dòng)模態(tài)會(huì)發(fā)生改變,下面采用仿生設(shè)計(jì)原理對(duì)變量輸入后無(wú)人機(jī)運(yùn)動(dòng)模態(tài)變化和反饋?lái)憫?yīng)情況進(jìn)行總結(jié)。
首先,對(duì)俯仰角因素變化后無(wú)人機(jī)運(yùn)動(dòng)模態(tài)進(jìn)行仿生實(shí)驗(yàn)和總結(jié)。利用仿生技術(shù),輸入俯仰角指令0.1754rad,仿生實(shí)驗(yàn)中可見(jiàn)無(wú)人機(jī)在1.0s內(nèi)迅速做出響應(yīng),俯仰角曲率迅速上升并在短時(shí)間內(nèi)曲率變化率迅速降低,直至2.0s左右完成俯仰角調(diào)整。結(jié)果提示俯仰角響應(yīng)無(wú)超調(diào),穩(wěn)態(tài)無(wú)誤差,無(wú)人機(jī)可在2.0s內(nèi)完成俯仰角調(diào)整。
然后,對(duì)俯仰角變化過(guò)程中俯仰角變化速率進(jìn)行觀察和總結(jié)。利用仿生技術(shù),輸入俯仰角指令0.1754rad,仿生實(shí)驗(yàn)中可見(jiàn)無(wú)人機(jī)俯仰角速率曲線呈單峰特征,指令輸入后先迅速上升再迅速下降,最后趨于平穩(wěn),俯仰角速率在0.6s達(dá)到峰值,最大速率在0.25rad/s-0.28rad/s之間,1.5s時(shí)達(dá)到既定俯仰角,此時(shí)俯仰角變化速率為0.0rad/s。仿生實(shí)驗(yàn)結(jié)果提示俯仰角調(diào)整信息輸入后該飛控系統(tǒng)可在短時(shí)間內(nèi)進(jìn)行響應(yīng)和反饋,從指令下達(dá)到達(dá)成時(shí)間可鎖定在2.0s以內(nèi),提示特征結(jié)構(gòu)配置法下的無(wú)人機(jī)飛控系統(tǒng)穩(wěn)定性較強(qiáng)、響應(yīng)速度較快。
最后,對(duì)俯仰角變化過(guò)程中無(wú)人機(jī)攻角變化特征進(jìn)行觀察和總結(jié)。利用仿生技術(shù),輸入俯仰角指令0.1754rad,仿生實(shí)驗(yàn)中可見(jiàn)無(wú)人機(jī)攻角變化和升降舵偏轉(zhuǎn),根據(jù)系統(tǒng)分析結(jié)果,指令輸入后1.2s內(nèi)無(wú)人機(jī)攻角0.13rad/s增加,升降舵偏轉(zhuǎn)角最大增量可達(dá)0.44rad/s。整體上來(lái)看,攻角變化曲線呈單峰特征,先迅速上升再勻速降低,最后歸零,使得無(wú)人機(jī)可在俯仰角變化的基礎(chǔ)下穩(wěn)定升降;升降舵偏轉(zhuǎn)角偏轉(zhuǎn)曲線則呈現(xiàn)一峰雙谷特征,在指令下達(dá)后0.4s內(nèi)迅速降低,在0.4s-1.1s內(nèi)迅速升高至峰值,在1.1s-2.0s內(nèi)迅速降低,2.0s后緩慢升高并歸零。
綜合來(lái)說(shuō),從上述的仿生實(shí)驗(yàn)及數(shù)據(jù)中心可以確定:(1)特征結(jié)構(gòu)配置法下,無(wú)人機(jī)飛控系統(tǒng)具有較快的響應(yīng)速度,從指令下達(dá)到達(dá)到既定狀態(tài)不超過(guò)2.0s,響應(yīng)速度較快,可滿足絕大多數(shù)情況下的縱向調(diào)整需要,具備快速反應(yīng)特征。(2)特征結(jié)構(gòu)配置法下的無(wú)人機(jī)飛控系統(tǒng)響應(yīng)期間系統(tǒng)穩(wěn)定性較強(qiáng),具有明確的變化特征,變化速率快、穩(wěn)、準(zhǔn),可靠性和安全性較強(qiáng)。
5.2 橫向運(yùn)動(dòng)測(cè)試
前文已經(jīng)提到特征結(jié)構(gòu)配置法中無(wú)人機(jī)飛控橫向運(yùn)動(dòng)的主導(dǎo)因素為側(cè)滑角、滾轉(zhuǎn)角速率、滾轉(zhuǎn)角和偏航角速率,因此從邏輯上來(lái)說(shuō)從對(duì)上述四個(gè)主導(dǎo)因素進(jìn)行調(diào)整后無(wú)人機(jī)的橫向運(yùn)動(dòng)模態(tài)會(huì)發(fā)生改變,下面采用仿生設(shè)計(jì)原理對(duì)變量輸入后無(wú)人機(jī)運(yùn)動(dòng)模態(tài)變化和反饋?lái)憫?yīng)情況進(jìn)行總結(jié)。
首先,對(duì)滾轉(zhuǎn)角因素變化后無(wú)人機(jī)運(yùn)動(dòng)模態(tài)進(jìn)行仿生實(shí)驗(yàn)和總結(jié)。利用仿生技術(shù),輸入滾轉(zhuǎn)角指令0.52356rad/s,仿生實(shí)驗(yàn)中可見(jiàn)無(wú)人機(jī)滾轉(zhuǎn)角迅速變化,滾轉(zhuǎn)角曲率迅速上升并在短時(shí)間內(nèi)曲率變化率迅速降低,1.5s內(nèi)完成上升動(dòng)作,2.0s內(nèi)完成所有動(dòng)作調(diào)節(jié),最大增量0.51rad/s,2.0s后滾轉(zhuǎn)角變化曲率歸零,提示達(dá)到既定調(diào)整目標(biāo),滾轉(zhuǎn)角響應(yīng)無(wú)超調(diào),穩(wěn)態(tài)無(wú)誤差。
然后,對(duì)滾轉(zhuǎn)角變化過(guò)程中的滾轉(zhuǎn)角變化速率進(jìn)行分析和總結(jié)。利用仿生技術(shù),輸入滾轉(zhuǎn)角指令0.52356rad/s,仿生實(shí)驗(yàn)中可見(jiàn)無(wú)人機(jī)滾轉(zhuǎn)角速率曲線呈無(wú)峰特征,指令輸入后1.0s內(nèi)滾轉(zhuǎn)角迅速上升,并于1.2s達(dá)到既定滾轉(zhuǎn)角,此時(shí)滾轉(zhuǎn)角變化速率為0.0rad/s。仿生實(shí)驗(yàn)結(jié)果提示滾轉(zhuǎn)角指令輸入后該飛控系統(tǒng)可在短時(shí)間內(nèi)進(jìn)行響應(yīng)和反饋,從指令下達(dá)到達(dá)成時(shí)間可鎖定在1.5s以內(nèi),提示特征結(jié)構(gòu)配置法下的無(wú)人機(jī)飛控系統(tǒng)穩(wěn)定性較強(qiáng)、響應(yīng)速度較快。
對(duì)無(wú)人機(jī)俯仰角變化過(guò)程中偏航角速率進(jìn)行觀察和總結(jié)。利用仿生技術(shù)輸入滾轉(zhuǎn)角指令0.52356rad/s,仿生實(shí)驗(yàn)中可見(jiàn)無(wú)人機(jī)偏航角變化速率和偏航角變化曲線,整體上偏航角速率隨著滾轉(zhuǎn)角的調(diào)整而變化,曲線上呈單峰特征,0.4s內(nèi)迅速上升并達(dá)到峰值,0.4s-1.5s內(nèi)迅速降低,1.5s后緩慢降低最終于3.0s時(shí)歸零,峰值時(shí)偏航角速率最大可達(dá)0.06rad/s,滾轉(zhuǎn)角調(diào)整完成后偏航角速率降低至0.02rad/s。同時(shí)方向舵偏航角曲線則呈現(xiàn)勻速降低,隨著滾轉(zhuǎn)角調(diào)整偏航角曲線迅速降低,直至最低值。
最后,對(duì)滾轉(zhuǎn)角變化過(guò)程中無(wú)人機(jī)側(cè)滑角變化特征進(jìn)行觀察和總結(jié)。利用仿生技術(shù),輸入滾轉(zhuǎn)指令0.52356rad/s,仿生實(shí)驗(yàn)中可見(jiàn)無(wú)人機(jī)側(cè)滑角變化和方向舵偏轉(zhuǎn),根據(jù)系統(tǒng)分析結(jié)果,指令輸入后1.2s內(nèi)無(wú)人機(jī)側(cè)滑角0.0085rad/s增加,滾轉(zhuǎn)角達(dá)到穩(wěn)定狀態(tài)時(shí),側(cè)滑角為-0.003rad,協(xié)調(diào)轉(zhuǎn)彎過(guò)程中側(cè)滑角實(shí)現(xiàn)了零保持。副翼偏轉(zhuǎn)角最大增量約0.16rad,穩(wěn)態(tài)值約O.0025rad。方向舵偏轉(zhuǎn)角最大增量約0.11rad,穩(wěn)態(tài)值約0.008rad。
綜合來(lái)說(shuō),從上述的仿生實(shí)驗(yàn)及數(shù)據(jù)中心可以確定:(1)特征結(jié)構(gòu)配置法下,無(wú)人機(jī)橫向控制響應(yīng)速度較快,最快響應(yīng)時(shí)間在1.5s以內(nèi)。(2)特征結(jié)構(gòu)配置法下的無(wú)人機(jī)橫向控制反饋結(jié)果可靠,協(xié)調(diào)轉(zhuǎn)向零保持,穩(wěn)定性極佳。
6 結(jié)束語(yǔ)
本文對(duì)無(wú)人機(jī)特征結(jié)構(gòu)配置法飛控系統(tǒng)下的模態(tài)方程和控制律進(jìn)行分析,同時(shí)結(jié)合仿生實(shí)驗(yàn)對(duì)該系統(tǒng)的輸出反饋情況進(jìn)行探究,實(shí)現(xiàn)了該飛控系統(tǒng)內(nèi)部的解耦。總的來(lái)說(shuō),特征結(jié)構(gòu)配置法下無(wú)人機(jī)飛控系統(tǒng)俯仰角能快速跟蹤指令信號(hào),橫側(cè)向運(yùn)動(dòng)的協(xié)調(diào)轉(zhuǎn)彎控制實(shí)現(xiàn)了滾轉(zhuǎn)角快速跟蹤指令信號(hào)、無(wú)人機(jī)快速轉(zhuǎn)彎以及零側(cè)滑保持,具有較好的飛行動(dòng)態(tài)性能。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測(cè)試(2018年18期)2018-11-14 02:30:34
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:39
機(jī)電信息(2014年27期)2014-02-27 15:53:56
