四足機器人跳躍控制規(guī)劃及仿真分析*
2021-06-29 10:57:46任坤照田春霖
科技創(chuàng)新與應(yīng)用 2021年17期
關(guān)鍵詞:規(guī)劃
任坤照,田春霖,陳 帥,鄭 達,劉 巖
(1.西安交通大學(xué) 電氣工程學(xué)院,陜西 西安710000;2.西安交通大學(xué) 電信學(xué)部,陜西 西安710000;3.西安交通大學(xué) 機械學(xué)院,陜西 西安710000)
由于四足仿生機器人具有高機動性,負載和適應(yīng)能力強,可運用于物資運輸、搶險救援等方面,因而具有廣闊的應(yīng)用前景。
四足機器人的性能主要取決于對復(fù)雜環(huán)境的適應(yīng)能力,實現(xiàn)不同步態(tài)的規(guī)劃最為關(guān)鍵。目前,國內(nèi)外對四足機器人的Walk(慢步)、Trot(快步)等一般步態(tài)的研究都較為成熟,如Hiroshi Kimura等提出了基于各種復(fù)雜環(huán)境下的Walk步態(tài)的閉環(huán)控制系統(tǒng)[1],李川等基于足端軌跡及CPG(Central Pattern Generators)網(wǎng)絡(luò)對兩種步態(tài)展開了研究[2-3]。但對于四足機器人的跳躍步態(tài)的研究較少,跳躍規(guī)劃的理論仍需完善,在機械結(jié)構(gòu)、運動過程中姿態(tài)調(diào)整也有待進一步改進,對其運動學(xué)、動力學(xué)的研究成為熱點。在實際場景中,跳躍步態(tài)可以跨越障礙物,適應(yīng)各種復(fù)雜地表,應(yīng)用廣泛,極大增強了四足機器人的運動性能。
本文著重對四足機器人的跳躍步態(tài)進行控制規(guī)劃并通過搭建仿真平臺進行驗證。根據(jù)足端是否觸地分階段采取利用幾何解析法進行軌跡規(guī)劃。利用D-H法建立機身質(zhì)心與各關(guān)節(jié)的坐標系,并基于正逆運動學(xué)對跳躍步態(tài)進行分析,求解出各階段關(guān)節(jié)角度函數(shù)。同時,根據(jù)Lagrange法以及D'Alembert's原理對跳躍過程進行動力學(xué)分析,得到關(guān)節(jié)電機的力矩驅(qū)動函數(shù)。
通過SolidWork軟件建立了全肘式四足機器人的結(jié)構(gòu)模型,使用ADAMS和MATLAB軟件對物理樣機進行運動學(xué)聯(lián)動仿真,驗證了跳躍控制規(guī)劃的有效性。
1 跳躍運動建模
四足機器人的設(shè)計模型如圖1所示。在跳躍過程中,只研究正中面上的運動特征,對冠狀面不做考慮。同時,由于在跳躍過程中前(后)兩腿的運動狀態(tài)相同,因此,可把四足機器人視為一維平面的多剛體系統(tǒng)。根據(jù)足底是否觸地,將跳躍過程分為起跳相、騰空相和著地相。在足端騰空時機器人與地面不存在約束限制,即機身不受外部作用力與力矩。
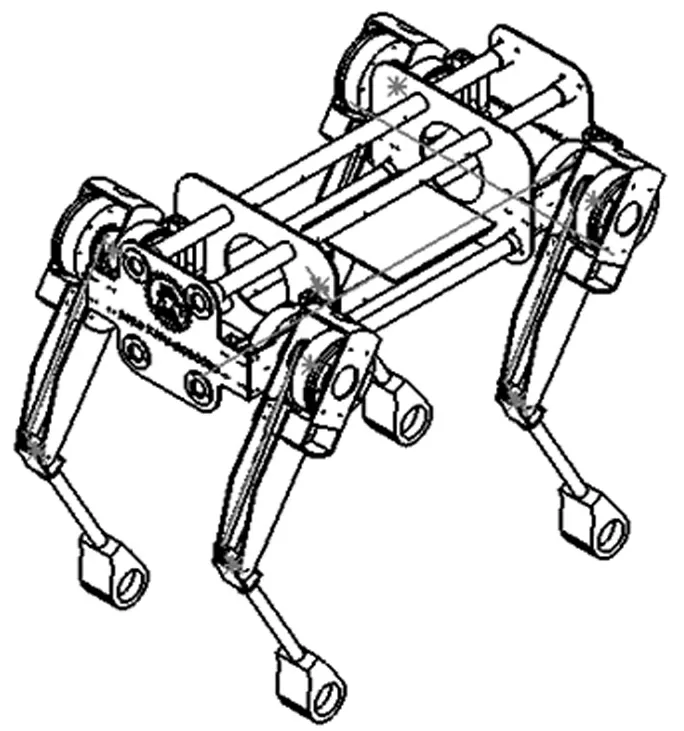
圖1 四足機器人設(shè)計模型
1.1 D-H坐標系建立
如圖2所示,根據(jù)D-H()法對四足機器人建立坐標系。據(jù)此進行各坐標系的坐標轉(zhuǎn)換,對跳躍過程進行運動學(xué)分析。
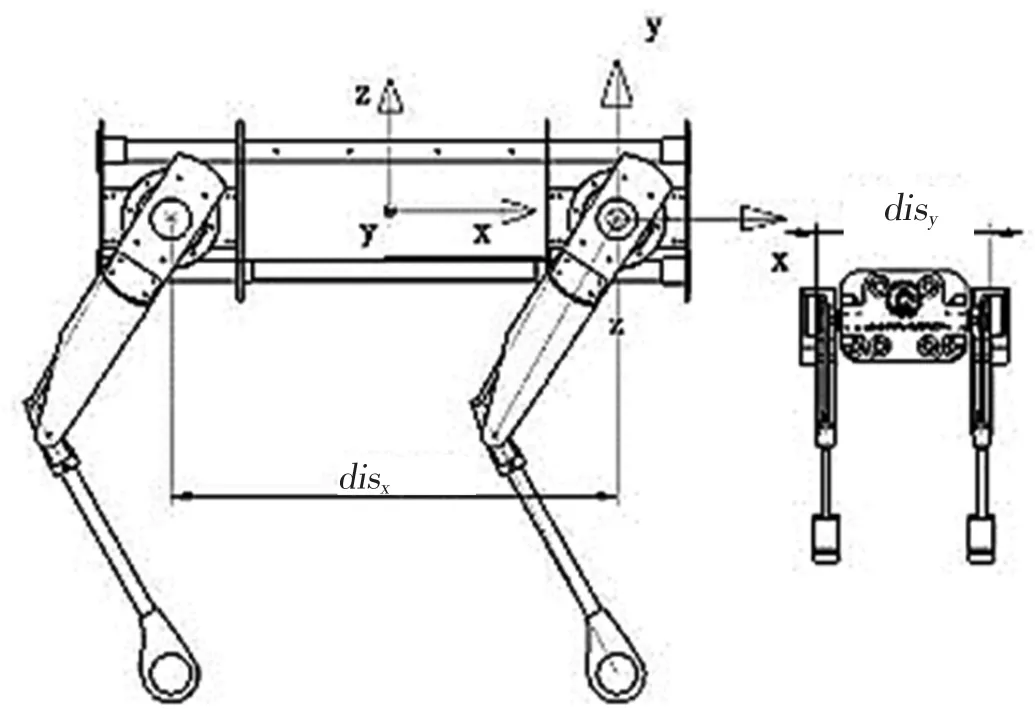
圖2 四足機器人運動學(xué)坐標系坐標圖
在軀體的幾何正中心建立身體坐標系{Ob},前進方向為x軸的正方向,豎直向上為z軸的正方向。以順時針方向?qū)λ臈l腿分別編號為1,2,3,4。在每條腿的髖關(guān)節(jié)建立坐標系{Oih}(i=1,2,3,4),{Oih}的x軸正向為豎直向下方向,z軸正向為前進方向。同理,對膝關(guān)節(jié)建立坐標系{Oik},以足端為原點建立坐標系{Oit}。由此可得身體坐標系到髖關(guān)節(jié)坐標系的轉(zhuǎn)換矩陣N如式(1)。以左前腿為例,設(shè)足端運動軌跡在身體坐標系下的函數(shù)為z=f(x,y)。由足端在身體坐標系下的坐標P知足端在髖關(guān)節(jié)坐標系下的坐標P0。由此可以逆解出大小腿電機旋轉(zhuǎn)角度。
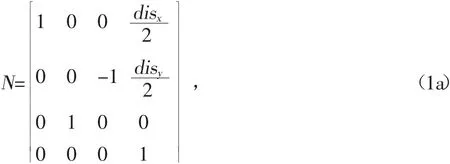

式中,disx為前兩腿髖關(guān)節(jié)間距;disy為同側(cè)兩腿髖關(guān)節(jié)間距。
1.2 跳躍軌跡規(guī)劃
1.2.1 起跳階段軌跡規(guī)劃
起跳階段需保證足端與接觸地面有足夠的摩擦力,即在跳躍過程未發(fā)生相對滑動,同時髖關(guān)節(jié)相對于足底坐標應(yīng)該滿足以下條件:
(1)初始機身高度為y0,水平位移為0m離地前機身高度為y1,水平位移x1;
(2)初速度為0m/s,離地前速度為v1;
(3)初加速度為0m/s2,離地前,豎直加速度為-g,水平加速度為ax1。
在起跳階段,足底在大地坐標系下位置固定,故以足底為參考,規(guī)劃機器人質(zhì)心的運動方程。由于在起跳階段,四腿同時起跳,動作一致,可只考慮單腿的運動。如圖3所示,設(shè)機身質(zhì)心在起跳階段,水平加速度ax(t)=k1t,豎直加速度ay(t)=k2t(k1、k2為常系數(shù)),則水平位移為,豎直位移為
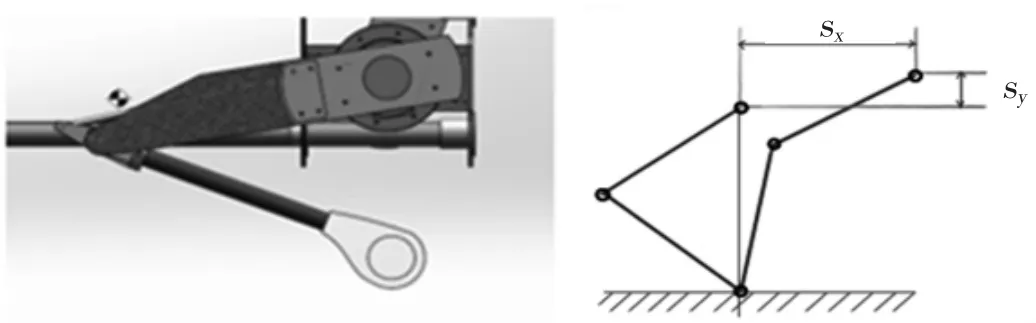
圖3 跳躍階段單腿示意圖
由于髖關(guān)節(jié)的運動軌跡與質(zhì)心同步,設(shè)足端為原點O,髖關(guān)節(jié)的坐標為B(PX,PY),建立如圖4所示坐標系。

圖4 起跳階段腿部關(guān)節(jié)坐標系
起跳階段D-H參數(shù)見表1。
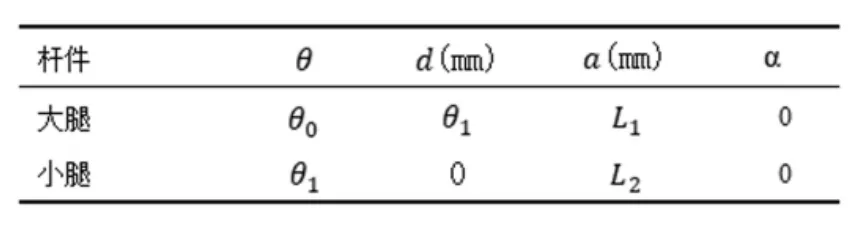
表1 起跳階段D-H參數(shù)
髖關(guān)節(jié)在基坐標的轉(zhuǎn)換矩陣:

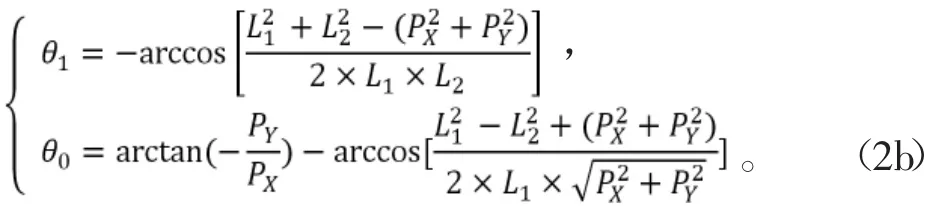
利用幾何解析法對起跳階段做逆運動學(xué)分析,由此得到關(guān)節(jié)轉(zhuǎn)動角度函數(shù):
1.2.2 騰空階段軌跡規(guī)劃
足端離地后,機器人處于僅受重力作用的騰空狀態(tài)。在騰空階段機器人機身做類平拋運動,即機身在豎直方向由于以-g為加速度的勻變速運動。同時,在起跳離地時刻與著地時刻,足端與地面接觸且速度均為0。在騰空階段,在跳躍過程中足端有伸縮。
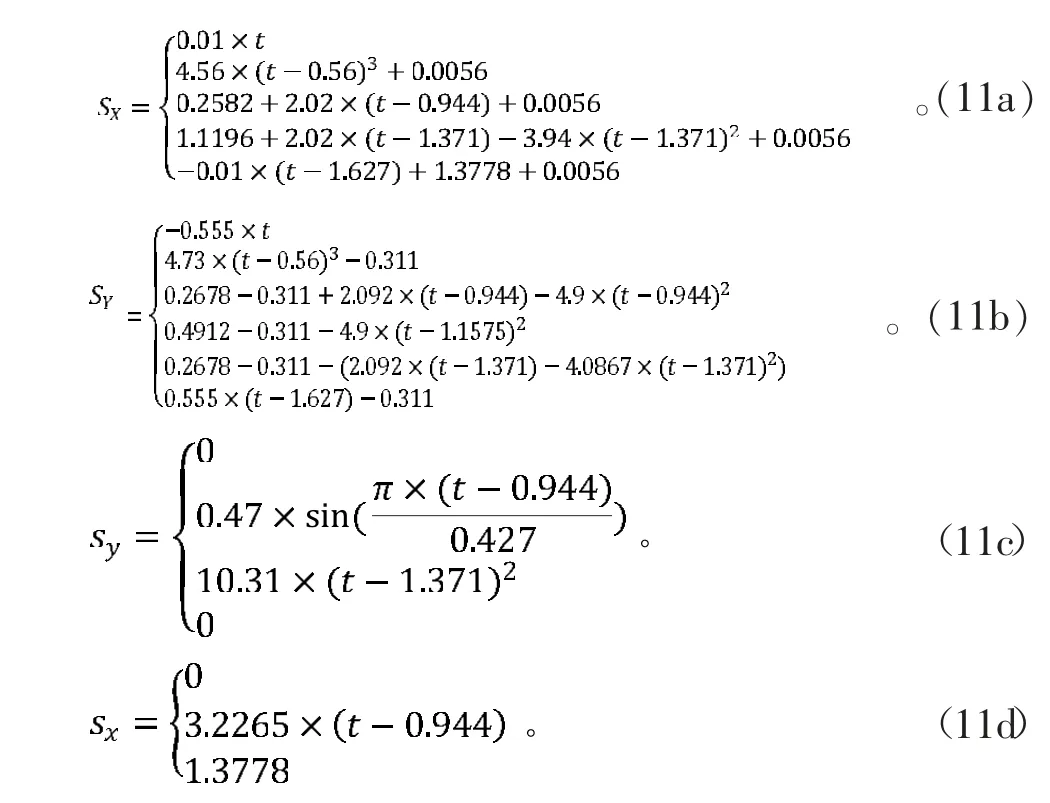
對于質(zhì)心而言,跳躍階段機身質(zhì)心運動軌跡為:

式中,νx1為起跳結(jié)束時刻水平速度;νy1為豎直速度。如圖5,以髖關(guān)節(jié)為原點建立坐標系:
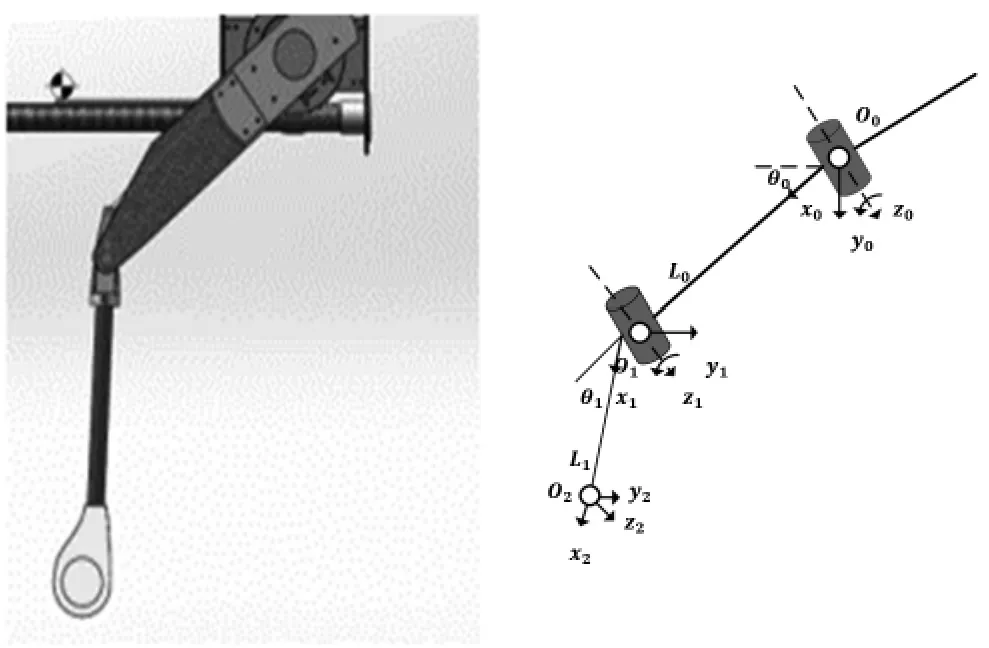
圖5 騰空階段腿部關(guān)節(jié)坐標系
足端在基坐標的轉(zhuǎn)換:

得到跳躍過程中的角度驅(qū)動函數(shù):
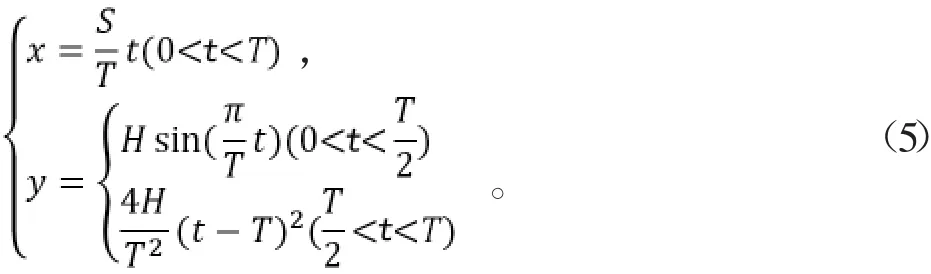
跳躍機器人有一定的越障能力,欲得到跳躍跨越的最大障礙物高度極限H。用sin函數(shù)曲線以及二階多項式擬合足端軌跡,規(guī)劃足端軌跡:
1.2.3 著地階段軌跡規(guī)劃
足端著地后,此時地面有足夠的摩擦力,即無相對滑動。在電機力矩驅(qū)動下產(chǎn)生與機身慣性相反的作用力,使得機器人的速度減小直至為0m/s。著地階段可視為起跳階段的逆過程。同樣,此時足端固定,如圖6,建立坐標系。著地階段質(zhì)心的位移曲線為
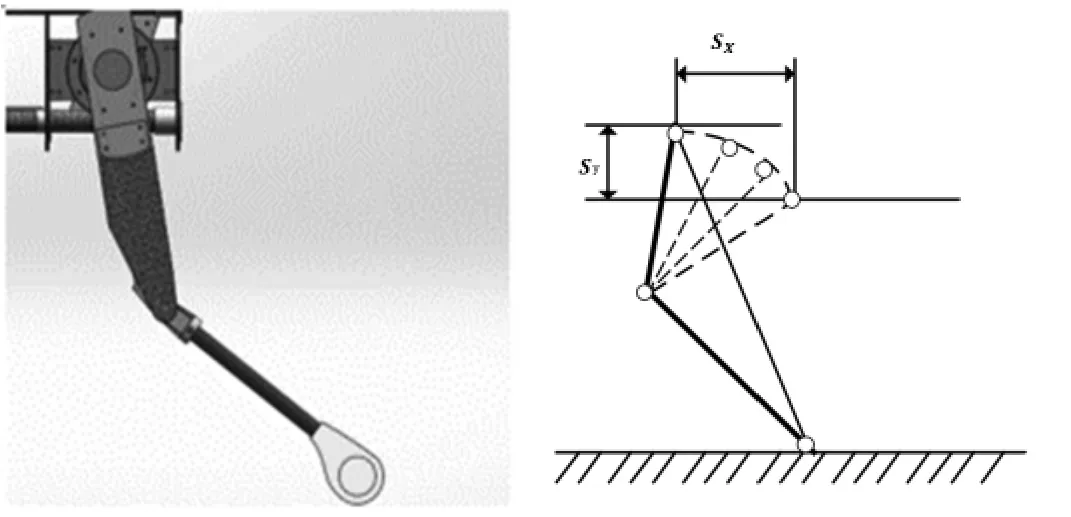
圖6 著地階段腿部關(guān)節(jié)坐標系
2 動力學(xué)建模
四足機器人關(guān)節(jié)數(shù)較多,整個系統(tǒng)有多個輸入輸出,力學(xué)關(guān)系較為復(fù)雜。本文采用Lagrange法以及D'Alembert's原理對其進行動力學(xué)分析,根據(jù)運動規(guī)劃,求解跳躍過程中各關(guān)節(jié)驅(qū)動力矩,進而得到電機的驅(qū)動力函數(shù)。
力矩控制的靈敏度更高,控制方式以及動態(tài)性能更好。如圖7所示,建立跳躍過程中的受力分析圖:
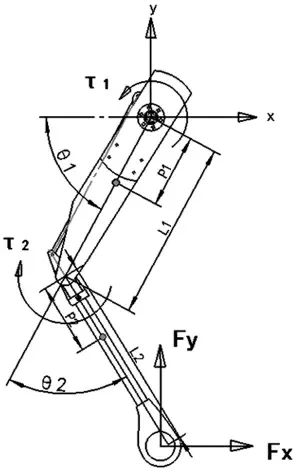
圖7 四足機器人單腿的受力分析
單腿物理參數(shù)見表2。
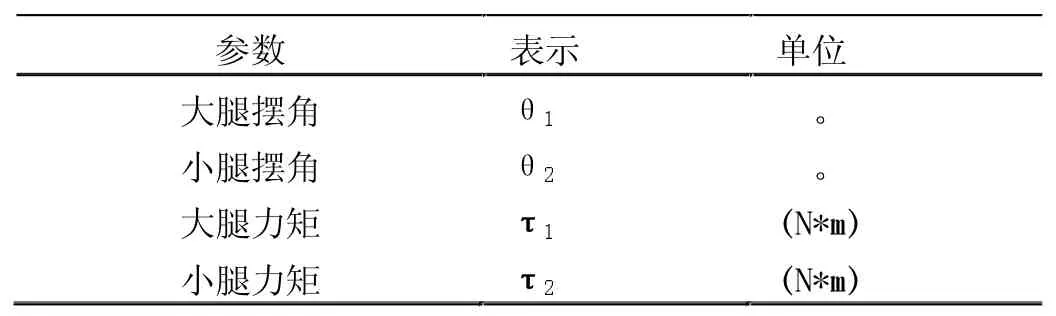
表2 單腿物理參數(shù)
設(shè)定整個機器人的機械結(jié)構(gòu)均為剛性,不發(fā)生柔性變形,同時忽略關(guān)節(jié)間的相對摩擦以及物理樣機裝備過程的誤差。由于起跳階段動力較為簡單,此處僅討論騰空與著地階段的動力學(xué)分析。與運動學(xué)分析類似,建立如圖7坐標系。

式中,P1為大腿質(zhì)心到髖關(guān)節(jié)距離;P2為小腿質(zhì)心到膝關(guān)節(jié)距離(X1,Y1)為大腿質(zhì)心坐標;(X2,Y2)為小腿質(zhì)心坐標。此時動能Ek,勢能Ep為:
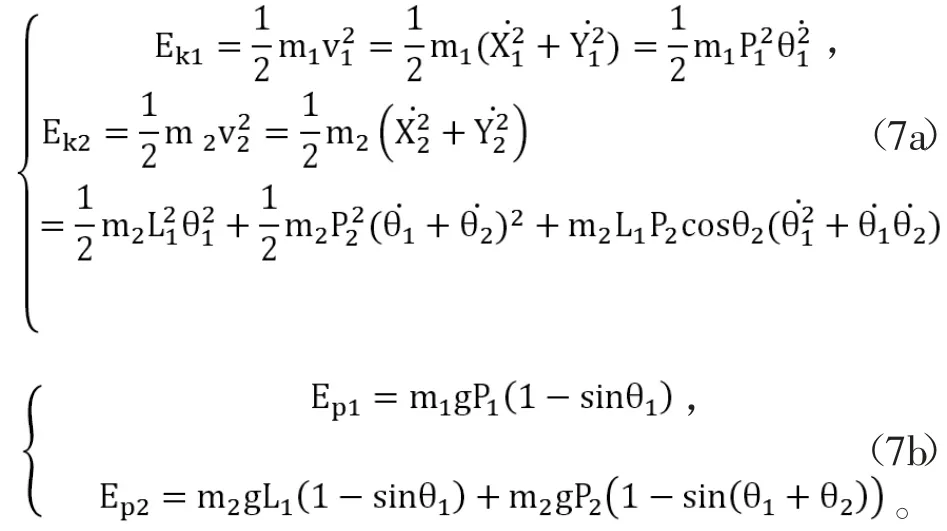
得到Lagrange函數(shù):
式中,M1為髖關(guān)節(jié)驅(qū)動力矩;M2為肘關(guān)節(jié)驅(qū)動力矩。
著地后,由于機身具有慣性,此時需要反方向的作用力,設(shè)此時足端與地面無相對滑動,地面給機器人的靜摩擦力。根據(jù)D'Alembert's原理,對單腿力矩平衡分析得到:
如圖8,對整體進行受力分析,由于跳躍過程中軀干是平動,質(zhì)心處力矩為0,根據(jù)受力平衡與力矩平衡,得到式(9)的力學(xué)方程。
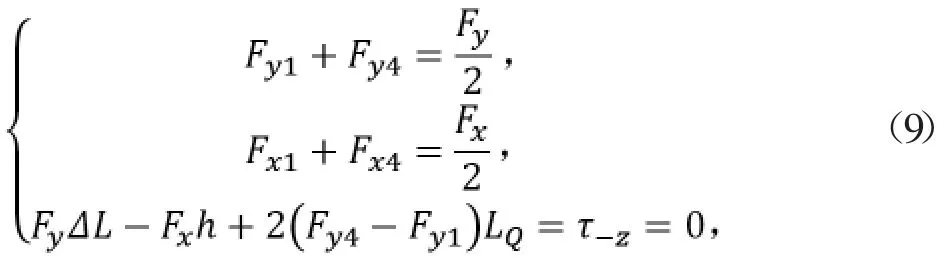
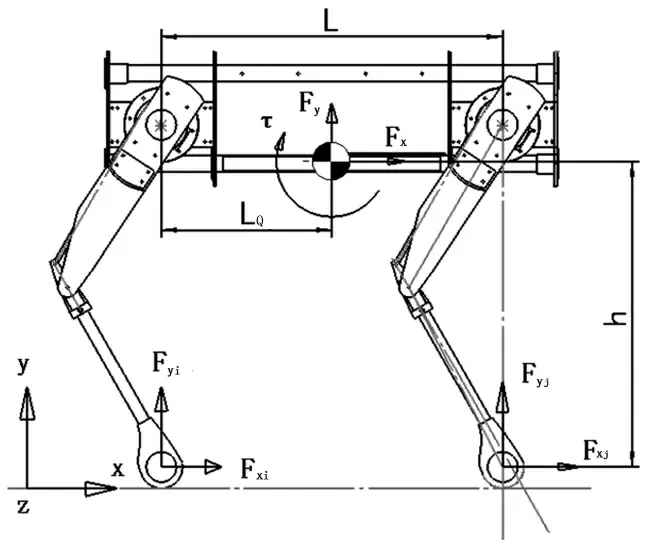
圖8 四足機器人整體的受力分析
式中,F(xiàn)xi、Fyi為第i條腿足端的水平與豎直方向的力,F(xiàn)x Fy為質(zhì)心受到的水平與豎直方向的力,LQ為質(zhì)心到髖關(guān)節(jié)的水平距離。
根據(jù)軌跡規(guī)劃可知大腿、小腿角加速度在開始準備跳躍的一瞬間發(fā)生突變,同時在離地和著地的瞬間有微小突變,由此引發(fā)力矩的突變。
在力矩控制中,可對這兩次的突變進行一個平滑的曲線過渡,可有效減小四足機器人運動過程中受到的沖擊力。
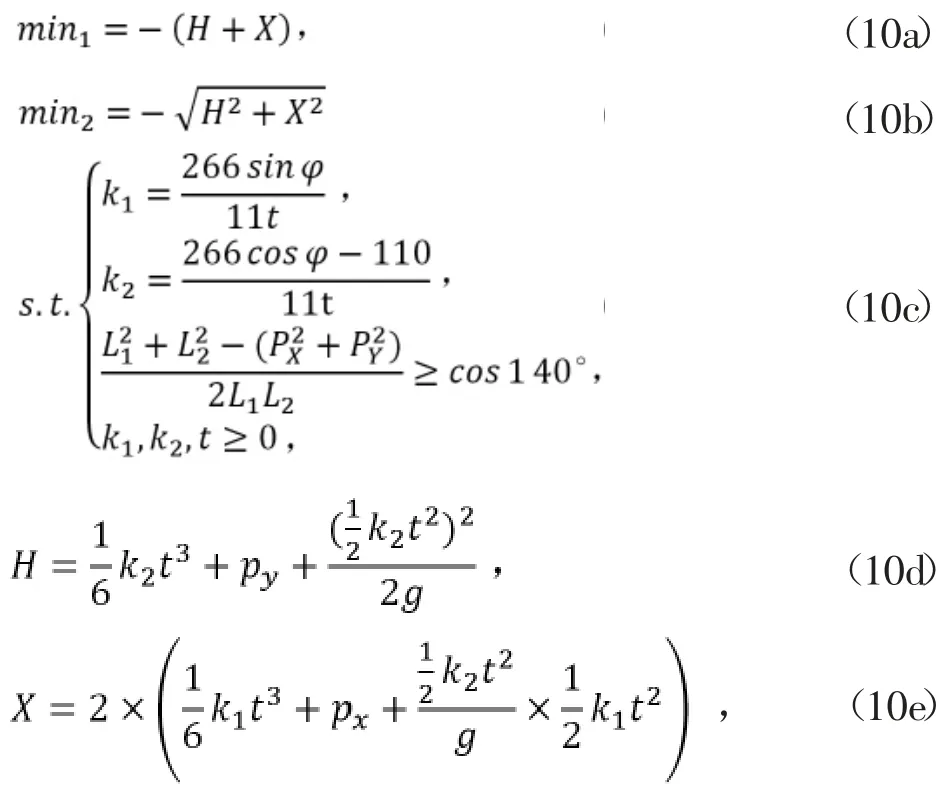
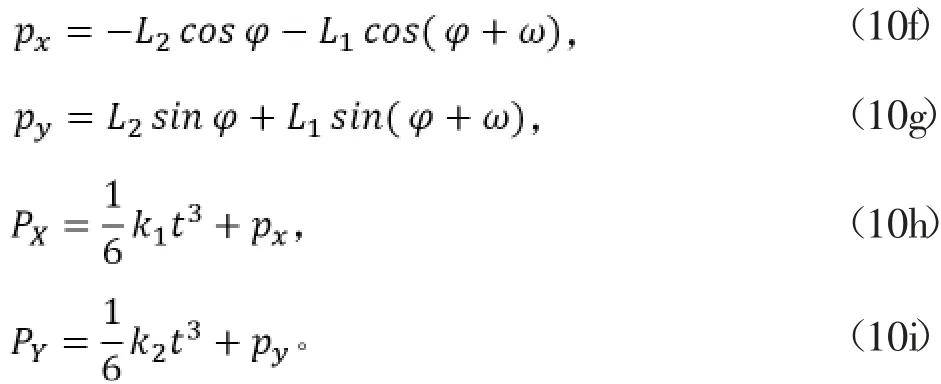
Fx1作為可變參數(shù),結(jié)合前面驅(qū)動力矩公式得到相應(yīng)驅(qū)動函數(shù),利用MATLAB求解出如圖9髖、膝關(guān)節(jié)力矩變化。由力矩圖觀察可得Fx1取時,即取Fx1=Fx4分析得到的力矩為最優(yōu)解。
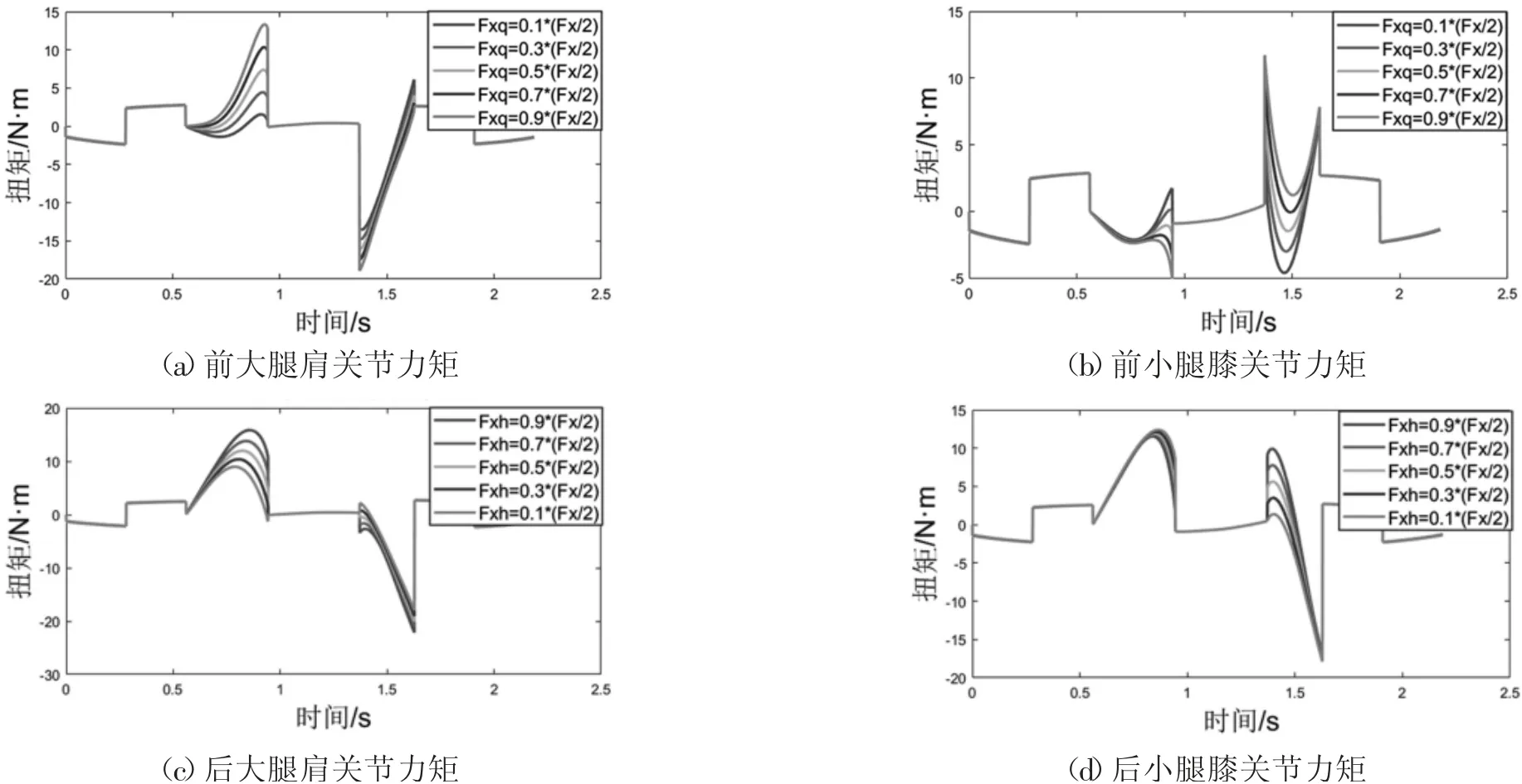
圖9 髖、膝關(guān)節(jié)力矩變化曲線圖
3 仿真研究
利用SolidWorks建立機器人得機械模型,并基于MATLAB中的Simulink模塊搭建四足機器人系統(tǒng),聯(lián)合ADAMS進行模擬實際跳躍過程。
3.1 物理樣機跳躍軌跡規(guī)劃
根據(jù)上述的軌跡規(guī)劃,對物理樣機探究其跳躍階段的最大限度。根據(jù)樣機參數(shù)(如表3所示),跳躍時取每條腿的輸出扭矩為T=18N·m,則跳躍時對地面的作用力為
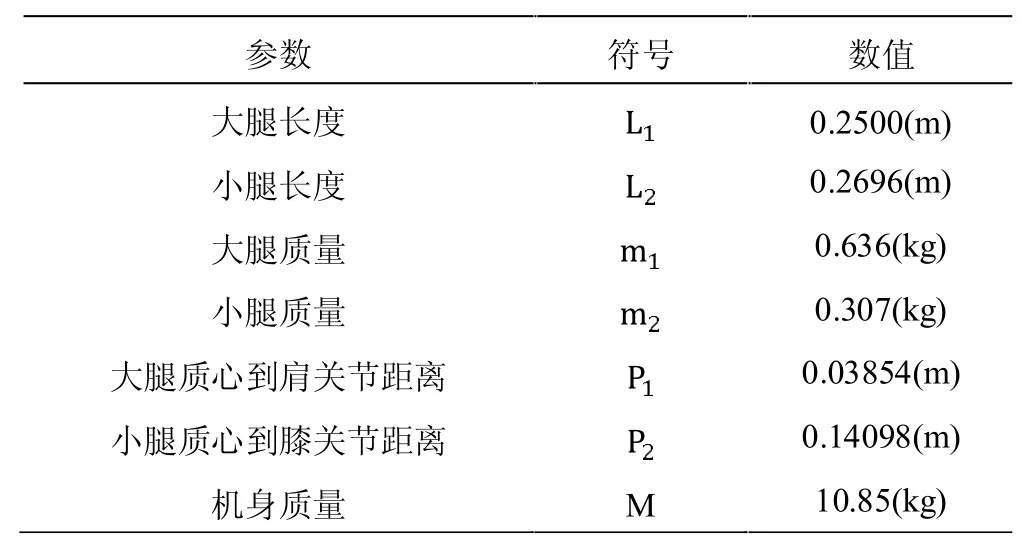
表3 物理樣機參數(shù)
設(shè)初始時,小腿與地面夾角為φ,大小腿夾角(外角)為ω,則根據(jù)規(guī)劃的軌跡,加速度a在起跳過程中與時間t成線性關(guān)系,則有k1=
為了使同一腿上兩個電機在起跳過程中都能以最優(yōu)效率輸出,應(yīng)使髖關(guān)節(jié)即身體質(zhì)心的運動軌跡和足端接觸點與髖關(guān)節(jié)中心的角度α盡量小,故需要對起跳的姿態(tài)進行調(diào)整,而起跳的姿態(tài)主要由小腿與地面夾角φ以及大小腿夾角ω決定,通過MATLAB對φ∈(40°,70°),ω∈(130°,160°)進行迭代分析。得到:φ越大,α越小,在ω=158°時α有最小值。考慮機械結(jié)構(gòu)的限制,取ω=148°。
由于φ與起跳階段加速度及時間都有關(guān),進而影響到跳躍的高度以及距離,為求得最優(yōu)的高度與距離,通過非線性規(guī)劃來得到φ的值。建立非線性規(guī)劃問題:
式中,(px,py)為開始起跳時髖關(guān)節(jié)較足端與地面接觸點的相對位置;(PX,PY)為起跳階段結(jié)束時髖關(guān)節(jié)相對于足端接觸點的位置;H、X分別為跳躍的高度和距離。
利用MATLAB得到目標函數(shù)最優(yōu)時,此時a=25.7°,t=0.384s。得到機身質(zhì)心軌跡隨時間變化的函數(shù):
根據(jù)得到的質(zhì)心與足端的運動軌跡函數(shù),得到如圖10的一個跳躍周期膝、髖關(guān)節(jié)角度變化曲線。
由圖10可以分析得到,在起跳階段,機體的前伸主要靠膝關(guān)節(jié)擺動,因此膝關(guān)節(jié)角度以較大幅度增加,而髖關(guān)節(jié)角度逐漸減小;在騰空期前期,膝關(guān)節(jié)的擺動對機體的豎直運動起主要作用;在跨越期間,髖關(guān)節(jié)角度變化較快,膝關(guān)節(jié)先收縮再伸展;著地后,恢復(fù)初始角度。
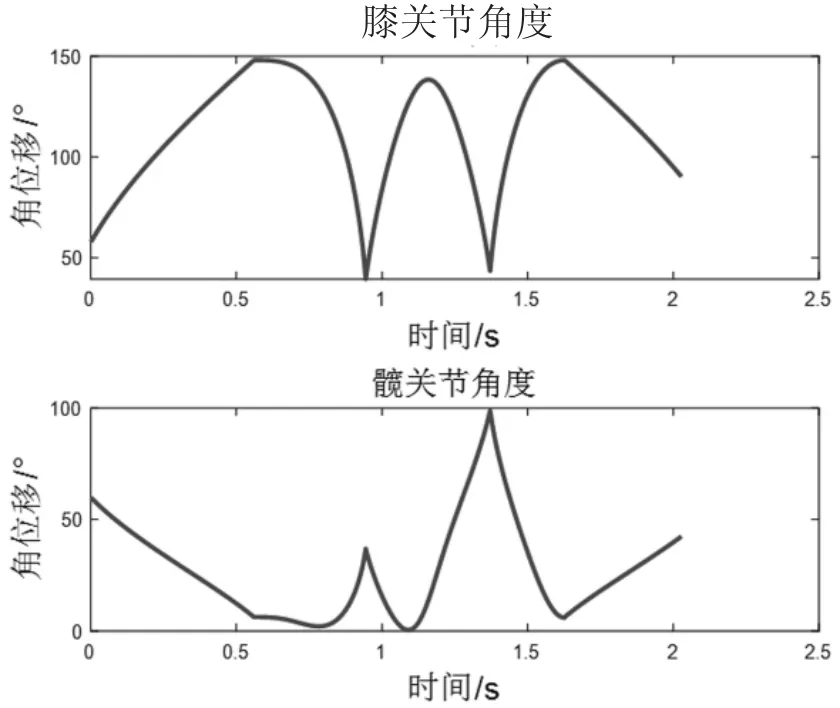
圖10 膝、髖關(guān)節(jié)角位移變化曲線圖
3.2 運動學(xué)仿真
通過前文規(guī)劃的四足機器人在跳躍過程中的機身質(zhì)心運動軌跡以及足端運動軌跡,通過正逆運動學(xué)分析,得到每條腿關(guān)節(jié)轉(zhuǎn)角方程,仿真過程如圖11所示。
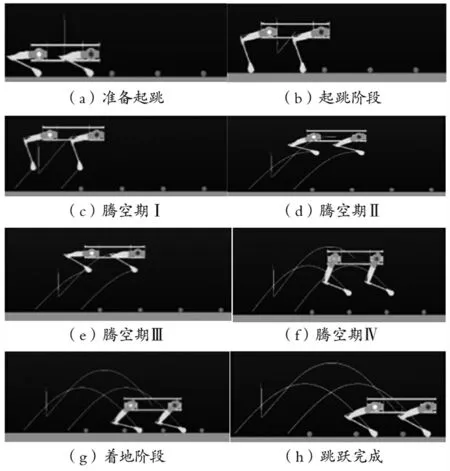
圖11 關(guān)節(jié)轉(zhuǎn)角函數(shù)的運動分解圖
為驗證規(guī)劃曲線的合理性與魯棒性,借助ADAMS得到機身質(zhì)心在水平與豎直方向位移與速度的變化圖,如圖12所示。
在整個跳躍周期內(nèi),通過圖12可以看出整個機身在水平方向的跳躍軌跡與之前規(guī)劃的運動軌跡基本一致,在某些節(jié)點處,如起跳著時的速度變化有較大起伏,最大偏差約為0.5m/s,但由于偏差時間較小,對整體運動軌跡影響較小。
圖12 中質(zhì)心水平方向偏移表明整個跳躍過程中機身較為穩(wěn)定,但在著地的瞬間豎直方向質(zhì)心會有0.005m的偏差,主要原因是在騰空階段對身體角度的調(diào)整不夠,使得下落時后腳先著地從而引起較小的偏差,可以通過加大騰空階段的下落過程中小腿擺動角加速度,使身體下落時質(zhì)心運動角度向下,機身更加平穩(wěn)著地。
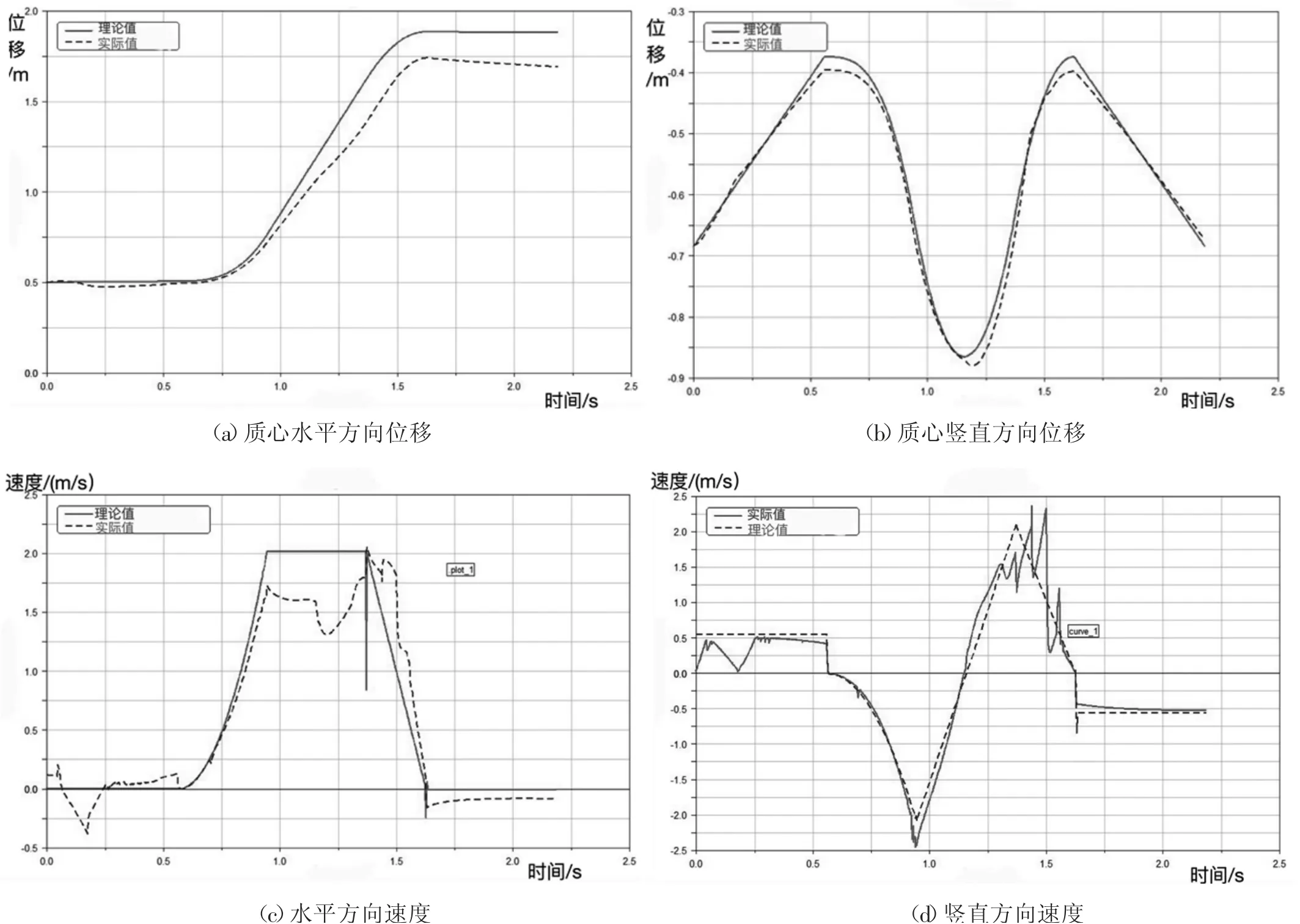
圖12 跳躍過程各參數(shù)變化圖
3.3 動力學(xué)仿真
整個機器人為鋼體結(jié)構(gòu),與地面接觸碰撞過程較為復(fù)雜,同時為驗證規(guī)劃的運動軌跡的正確性與合理性,故將前文得到的力矩驅(qū)動函數(shù)施加在ADAMS中對機器人模型的各腿的髖關(guān)節(jié)與肘關(guān)節(jié),進行動力學(xué)仿真。跳躍過程,四足機器人的運動分解姿態(tài)如圖13。從圖13中可以看出,機身質(zhì)心與足端的運動軌跡與規(guī)劃的曲線基本一致。起跳階段,獲得向上以及向前的驅(qū)動力矩,肘關(guān)節(jié)變化較大,在起跳過程中起主要作用。騰空階段,腿部有收縮,同時機身做類平拋運動。在著地階段,機身減速,重心降低。
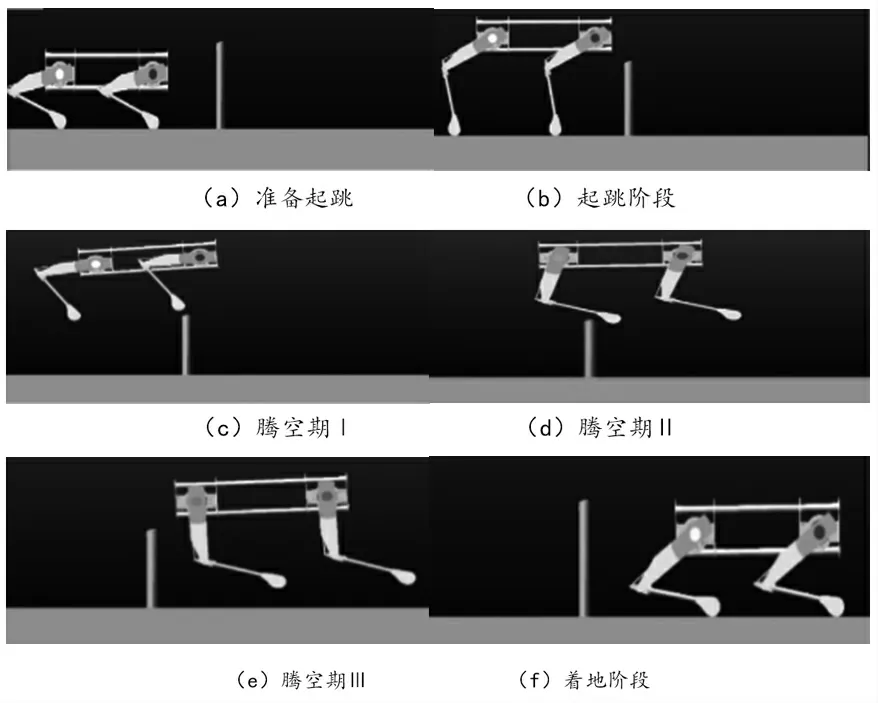
圖13 關(guān)節(jié)力矩函數(shù)的運動分解圖
水平與豎直方向的位移與速度的變化趨勢如圖14所示。在離地和著地的瞬間大小腿角加速度有微小突變,由此引發(fā)力矩的突變。可對這兩次的突變進行一個平滑的曲線過渡,減小四足機器人運動過程中受到的沖擊力。仿真結(jié)果與理論值基本一致,驗證了前文規(guī)劃曲線以及力矩驅(qū)動函數(shù)的正確性。
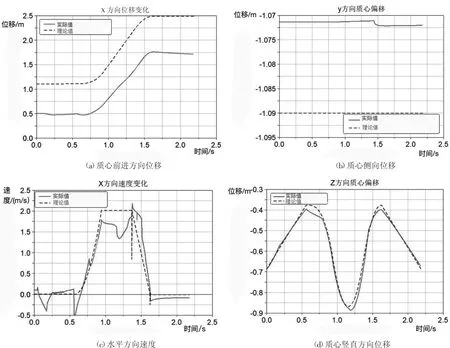
圖14 跨高欄全過程控制效果圖
4 結(jié)束語
根據(jù)四足動物跳躍運動特性,本文將跳躍過程分為起跳、騰空和著地三個階段分別進行運動曲線的規(guī)劃。通過正逆運動學(xué)分析得到了關(guān)節(jié)轉(zhuǎn)角控制函數(shù),并基于Lagrange法以及D'Alembert's原理進行動力學(xué)分析推導(dǎo)出力矩驅(qū)動控制函數(shù)。利用SolidWorks建立物理樣機模型,利用ADAMS聯(lián)合MATLAB搭建仿真平臺。進行了物理樣機的運動學(xué)、動力學(xué)仿真,將仿真結(jié)果與理論值進行比較,從而驗證了跳躍運動規(guī)劃曲線的可行性與正確性,以及角度控制、力矩控制的準確性與魯棒性,為后續(xù)四足機器人或其他跳躍型機器人控制規(guī)劃以及仿真實驗的研究提供了基礎(chǔ)。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機床(2017年3期)2017-06-23 08:11:34
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
