基于樹莓派的智能探測小車設(shè)計(jì)
2021-06-28 08:50:28劉天君常昊馬準(zhǔn)王鵬家
電子測試 2021年1期
劉天君,常昊,馬準(zhǔn),王鵬家
(北京信息科技大學(xué) 機(jī)電工程學(xué)院,北京,100192)
0 引言
近年來,隨著機(jī)械制造技術(shù)和信息技術(shù)的飛速發(fā)展,機(jī)器智能化技術(shù)取得了長足的進(jìn)步,相應(yīng)的,智能機(jī)器的應(yīng)用技術(shù)也在呈現(xiàn)全方位的進(jìn)步趨勢,各種類型的智能產(chǎn)品服務(wù)于各個(gè)領(lǐng)域,在各個(gè)領(lǐng)域中越來越發(fā)揮著難以替代的作用。因此,對智能機(jī)器人的深入研究具有十分重要的意義。在信息搜集領(lǐng)域,今天的人們對復(fù)雜環(huán)境中的信息需求與日俱增,但是新世紀(jì)的人們又對自身安全有著極高的意識(shí),兩相矛盾之下用于探測的機(jī)器人應(yīng)運(yùn)而生。火災(zāi)現(xiàn)場、自然災(zāi)害發(fā)生地、未探查過的區(qū)域等地方的環(huán)境數(shù)據(jù)采集,經(jīng)常需要探測者以身涉險(xiǎn),進(jìn)入到復(fù)雜危險(xiǎn)的環(huán)境中,這時(shí)為保障安全,就需要智能探測小車來完成相關(guān)工作。控制人員編輯軟件程序并以此來控制硬件系統(tǒng),智能化的機(jī)器就能夠?qū)崿F(xiàn)人們希望它完成的任務(wù)。智能小車是一種擁有強(qiáng)大的運(yùn)動(dòng)能力,模塊靈活配合能力和優(yōu)秀的智能化能力的自動(dòng)化機(jī)器。將其應(yīng)用于環(huán)境危險(xiǎn)工作繁雜的探測工作很大程度上滿足了人們的需求。隨著科技水平的提高,探測小車的種類越來越多,智能化水平越來越高,超聲波,紅外線等越來越多的傳感器出現(xiàn)在探測模塊上。但同時(shí),探測器數(shù)據(jù)的多樣化和可視化仍舊是需要解決的問題。超聲波、紅外線和攝像頭等傳感器都有著各自的優(yōu)缺點(diǎn),如何科學(xué)的結(jié)合各種傳感器仍是一大課題。
本次的探測小車設(shè)計(jì)以樹莓派作為核心控制器,借助超聲波、紅外線和攝像頭等探測設(shè)備進(jìn)行環(huán)境信息的采集,通過WIFI傳輸模塊[1]實(shí)現(xiàn)與控制終端進(jìn)行信息交互。通過Python語言編寫指令實(shí)現(xiàn)信號(hào)傳輸與實(shí)時(shí)控制[2]。將指令信號(hào)實(shí)時(shí)傳遞給樹莓派控制器從而達(dá)到對小車運(yùn)動(dòng)狀態(tài)的控制,以此實(shí)現(xiàn)小車對附近環(huán)境信息的探測和傳輸。從而達(dá)到人們遠(yuǎn)程采集環(huán)境信息的目的。
1 探測系統(tǒng)功能設(shè)計(jì)
1.1 設(shè)計(jì)目的
市場上單一傳感器的智能小車普遍存在感知環(huán)境準(zhǔn)確性低、行為控制靈敏度低的局限性,單一紅外線傳感器和超聲波傳感器都有自己的優(yōu)缺點(diǎn),我們發(fā)現(xiàn)紅外線超聲波傳感器的優(yōu)點(diǎn)可以彌補(bǔ)對方的不足,兩種傳感器共同探測周圍環(huán)境解決了單一傳感器感知周圍環(huán)境低的局限性,加入攝像頭進(jìn)行畫面實(shí)時(shí)傳遞降低了控制難度解決行為控制靈敏度低的局限性。既要將紅外線傳感器、超聲波傳感器和攝像頭安裝在智能小車上,又要用不同方法處理兩種信號(hào),還要保持與手機(jī)或電腦進(jìn)行畫面的實(shí)時(shí)傳遞,綜合考慮我們以樹莓派智能小車為基礎(chǔ)將紅外線傳感器,超聲波傳感器,攝像頭三種不同的傳感器加裝在智能小車上。利用多傳感器的優(yōu)勢互補(bǔ)打破單一傳感器感知環(huán)境準(zhǔn)確性偏低、行為控制靈敏度低的局限性[3]。
1.2 實(shí)現(xiàn)功能
多傳感器的樹莓派智能小車的三種傳感器是它采集環(huán)境信息的眼睛,中央處理器就是它處理信息的大腦[4]。三種傳感器負(fù)責(zé)采集外界數(shù)據(jù),然后把所收集到的外界數(shù)據(jù)傳輸?shù)叫≤嚨闹醒胩幚砥鳎醒胩幚砥髫?fù)責(zé)處理信息根據(jù)編程程序提取有用信息并經(jīng)過計(jì)算向相關(guān)零件下達(dá)行為指令來控制小車做出相應(yīng)的行動(dòng)。紅外線傳感器,超聲波傳感器,攝像頭三種不同的傳感器在智能小車身上進(jìn)行共同探測,樹莓派將不同傳感器的優(yōu)勢數(shù)據(jù)進(jìn)行整合以達(dá)到優(yōu)劣互補(bǔ)的目的,如表1所示。

表1 不同傳感器性能分析表
智能小車設(shè)計(jì)三種傳感器不僅可以解決單一傳感器在探測環(huán)境信息方面的劣勢、還能提高小車行為的靈活性,并且三種不同傳感器的共同探測加強(qiáng)對物體特征的采集[5]。樹莓派將不同種類的傳感器所提供的優(yōu)勢信息進(jìn)行整合處理,從而達(dá)到獲取更寬廣探測視野、更準(zhǔn)確的探測信息的目的。整體加強(qiáng)智能小車探測系統(tǒng)的抗干擾能力。令智能小車整體具有更為準(zhǔn)確的機(jī)器視野,可以處理復(fù)雜的障礙信息,滿足在多種環(huán)境下工作的要求。擁有更加完善的處理傳感信息能力的智能小車,可以應(yīng)用在更廣泛的領(lǐng)域。
2 系統(tǒng)硬件組成
2.1 主控制模塊
本次選用樹莓派4B的微型主板作為小車的控制核心,運(yùn)用 Broadcom BCM2837(B0)的SOC,搭載ARM Cortex-A53 1.4GHz 64-bit quad-core ARMv8 CPU內(nèi)存相對較大,擁有可實(shí)現(xiàn)多方擴(kuò)展的USB接口和更為先進(jìn)的網(wǎng)絡(luò)接口,可實(shí)現(xiàn)視頻,音頻的有效傳輸,完全可以實(shí)現(xiàn)人機(jī)之間的數(shù)據(jù)交流,滿足本次研究的所有需求。主控電路如圖1所示。

圖1 主控電路示意圖
2.2 電機(jī)驅(qū)動(dòng)模塊
智能小車通過4個(gè)直流減速電機(jī)和TB6612FNG電機(jī)搭建電機(jī)驅(qū)動(dòng)模塊來實(shí)現(xiàn)運(yùn)動(dòng)控制。TB6612FNG是一種性能強(qiáng)大的直流電機(jī)驅(qū)動(dòng)器件,其具有的電流MOSFET-H橋式結(jié)構(gòu)相較于傳統(tǒng)的晶體管H橋驅(qū)動(dòng)器具有更為優(yōu)秀的效率,可以承擔(dān)更大的負(fù)載。TB6612FNG電機(jī)驅(qū)動(dòng)模塊通過雙通道路輸出同時(shí)驅(qū)動(dòng)2個(gè)電機(jī),其擁有的4種電機(jī)控制模式可實(shí)現(xiàn)正轉(zhuǎn)、反轉(zhuǎn)、制動(dòng)、停止等一系列動(dòng)作,可以實(shí)現(xiàn)小車在各種環(huán)境下的運(yùn)動(dòng)要求,滿足設(shè)計(jì)所需小車要求。

圖2 驅(qū)動(dòng)電路圖
2.3 紅外探測尋光模塊
探測小車采用紅外線傳感器和光敏電阻器搭建紅外尋光模塊。小車所采用的紅外傳感器具有紅外發(fā)射管與接收管的結(jié)構(gòu),發(fā)射管發(fā)射一定頻率的紅外線,若是沒有檢測到障礙物,接收管接收不到信號(hào),電平會(huì)相應(yīng)的保持不變。若前方有障礙物,接收管會(huì)接收到經(jīng)過反射后的紅外線[6]。經(jīng)過這一過程,我們檢測相關(guān)引腳的電平變化便可以判斷出前方的障礙情況和環(huán)境狀況:同時(shí),傳感器裝有光敏電阻器,光敏電阻器的電阻與環(huán)境的光強(qiáng)呈現(xiàn)明顯的負(fù)相關(guān)關(guān)系。可以此來檢測前方光強(qiáng)情況:我們將光敏電阻連接到主控板上,通過相關(guān)引腳的電平變化來判斷環(huán)境光的強(qiáng)弱。主控板接收信號(hào)后,結(jié)合兩種不同的信號(hào),將會(huì)運(yùn)用相關(guān)先置算法對具體的周圍環(huán)境情況作大體分析,判斷前方的障礙情況和光照狀況。紅外尋光電路如圖3所示。

圖3 紅外尋光模塊電路示意圖
2.4 超聲波模塊
探測小車采用HC-SR04超聲波傳感器和舵機(jī)搭建超聲波云臺(tái)探測模塊。超聲波模塊具有兩個(gè)超聲波探頭,分別作為發(fā)射和接收超聲波。其測量的范圍是0-500cm。舵機(jī)可旋轉(zhuǎn),通過旋轉(zhuǎn)可實(shí)現(xiàn)超聲波探測模塊的多方向探測,大大提高了探測的靈活性,搭配循跡系統(tǒng)更好的解決了小車在復(fù)雜環(huán)境中的運(yùn)動(dòng)問題,為復(fù)雜環(huán)境的探測提供了更大的可行性。超聲波探測模塊主要應(yīng)用率超聲波測距的原理。在進(jìn)行超聲探測時(shí),主控系統(tǒng)先向超聲波Trig引腳輸入至少10us的高電平信號(hào),接著Trig引腳會(huì)自動(dòng)發(fā)出約為40khz的超聲波脈沖,同時(shí)自動(dòng)提高Echo腳的電平,當(dāng)傳感器檢測到回波信號(hào)時(shí),系統(tǒng)會(huì)立即調(diào)低Echo腳的電平。此過程中高電平持續(xù)的時(shí)間就是超聲波往返距離所用的時(shí)間。此時(shí)依據(jù)運(yùn)動(dòng)規(guī)律就可以計(jì)算出探測小車距離前方物體的距離,給出前方物體的大致位置坐標(biāo)[7]。
超聲波模塊可以具體算出前方物體距離探測小車的距離,給出了更為具體化的周圍物體信息,彌補(bǔ)了紅外尋光模塊在具體距離和位置坐標(biāo)方面的不足,使得探測小車得到的環(huán)境信息更為完整具體。超聲波模塊電路圖,如圖4所示。

圖4 超聲波模塊電路圖
2.5 攝像頭模塊
由于樹莓派微型電腦主板可通過外加WIFI圖像傳輸模塊實(shí)現(xiàn)視頻音頻的實(shí)時(shí)傳輸,所以探測模塊加裝了線性CCD攝像頭對要探測的環(huán)境進(jìn)行圖像的采集,并將采集的圖像資料轉(zhuǎn)換成數(shù)據(jù)資料傳送到小車控制主板,樹莓派主板通過WIFI將圖像傳輸至控制終端,在由控制終端將控制指令傳輸至樹莓派主控器,主控器控制電機(jī)做出相應(yīng)的反應(yīng)動(dòng)作。攝像頭的加入再一次具體了小車的探測數(shù)據(jù),彌補(bǔ)了超聲波和紅外線的探測結(jié)構(gòu)可視性不夠好的缺點(diǎn),使得探測小車的應(yīng)用面更加廣泛。攝像頭模塊電路連接圖,如圖5所示。

圖5 攝像頭連接電路圖
3 軟件設(shè)計(jì)
3.1 探測信號(hào)流程
由于小車需要對三種傳感器的信號(hào)進(jìn)行處理,紅外線與超聲波通的信號(hào)反饋到小車的主控板來實(shí)現(xiàn)小車對于距離的實(shí)時(shí)把控,樹莓派的WIFI模塊連接手機(jī)APP或者上位機(jī)來獲取攝像頭的圖像信息。探測信號(hào)流程圖,如圖6所示。
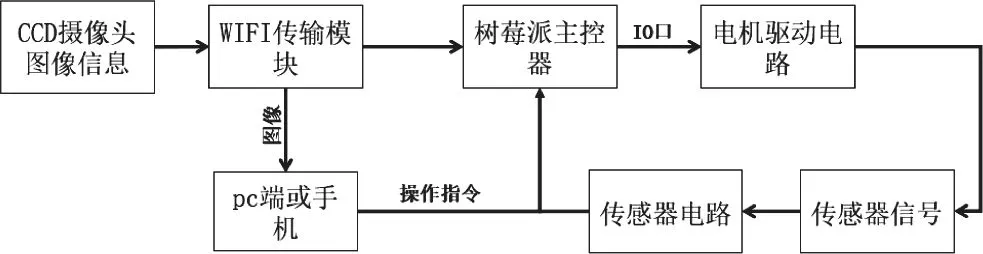
圖6 探測信號(hào)流程圖
3.2 探測信息處理結(jié)構(gòu)
主控器接收多種探測信號(hào)反饋,所以采用兩種處理方式對信息進(jìn)行處理。小車通電系統(tǒng)初始化后,WIFI圖像傳輸模塊與攝像頭開始工作,實(shí)現(xiàn)圖像的傳輸,在小車行動(dòng)時(shí)可以實(shí)時(shí)監(jiān)測小車周圍情況,并且可以通過WIFI將命令傳輸?shù)街骺仄魃稀V悄苄≤囘\(yùn)行時(shí)若前方未出現(xiàn)障礙物,智能小車?yán)^續(xù)前進(jìn);當(dāng)出現(xiàn)障礙物時(shí),紅外線以及超聲波傳感器接收信號(hào)后,通過傳感系統(tǒng)電路將信息發(fā)送給樹莓派主控制器處理傳感器信息進(jìn)行下一步避障操作[8]。智能小車車體上搭載的超聲波云臺(tái)開始分別左右各旋轉(zhuǎn)90°來判斷左右車體與障礙之間的距離A,B。數(shù)據(jù)A,B傳輸?shù)街骺仄鬟M(jìn)行與15cm的對比,若左邊車距A>15cm執(zhí)行左轉(zhuǎn)指令,若A<15cm&B>15cm執(zhí)行右轉(zhuǎn)指令;A,B<15cm則先執(zhí)行后退600ms指令,再向左轉(zhuǎn)600ms。期間攝像頭圖像不間斷傳輸,監(jiān)視小車避障過程中的實(shí)時(shí)環(huán)境信息。探測信息處理程序框圖,如圖7所示。

圖7 探測信息處理程序框圖
4 結(jié)語
本文介紹了以樹莓派為主控制器,實(shí)現(xiàn)處理多種探測信號(hào)的智能小車的軟、硬件設(shè)計(jì)。通過程序的編寫調(diào)用起各傳感器的信息,利用二維圖像數(shù)據(jù)和傳感器位置數(shù)據(jù)令智能小車的視覺多元化,主控器對傳感器信息的二次處理使智能小車獲得更為精準(zhǔn)的避障操作以及環(huán)境信息。本方案的優(yōu)點(diǎn)在于(1)樹莓派可以外接拓展板,擁有非常豐富的接口,可以為后續(xù)開發(fā)其他模塊提供便利,并且其具有較為強(qiáng)大的計(jì)算能力可以處理復(fù)雜信息。(2)在不同傳感器處理程序上采用了對位置傳感器信息的二次處理,加強(qiáng)了對傳感器信息的利用,提高小車避障精度。(3)對CCD攝像頭圖像數(shù)據(jù)的直接調(diào)用實(shí)現(xiàn)人對小車周邊環(huán)境的實(shí)時(shí)了解,增加對小車的把控。本設(shè)計(jì)方案也同樣存在一些問題(1)對于智能小車上線性CCD攝像頭采集的二維圖像信息沒有進(jìn)行分析處理。(2)小車上設(shè)計(jì)搭載的傳感器僅可以達(dá)到對障礙的感知,后續(xù)可添加巡線傳感器,雷達(dá)等更為豐富的傳感器,豐富智能小車的視覺。總的來說,設(shè)計(jì)方案整體是完善的,并且基本滿足了所設(shè)計(jì)需要的目的,在無人探測領(lǐng)域具有一定實(shí)用能力。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46