短基線時差法雷電定位儀的定位精度分析
2021-06-24 06:53:10蔡新景王延廷劉興山蘇有權王一平
東北電力技術 2021年4期
關鍵詞:信號
蔡新景,王延廷,劉興山,蘇有權,王一平
(1.沈陽工業大學電氣工程學院,遼寧 沈陽 110870;2.太平灣發電廠,遼寧 丹東 118000)
雷電定位系統(Lightning Locating System,LLS)由于可實時獲取云間閃和云地閃雷電過程的時空分布、強度和極性等特征在雷電物理、雷電預警和雷電防護等領域得到廣泛應用[1-2]。雷電定位方法有定向定位(Direction Finding,DF)和時差定位(Time Difference of Arrival,TDOA)[3-4]。DF定位采用正交環形天線測定落雷點與探測子站的方位角進行定位,探測的雷電信號主要集中于甚低頻(Very Low Frequency,VLF)[5];TDOA定位采用雷電電磁脈沖到達不同探測子站的時間差進行定位,探測的雷電信號包括甚低頻和甚高頻(Very High Frequency,VHF)[6-9]。當前大多雷電定位系統既采用定向定位,也采用時差定位。
VLF電磁輻射信號由于具有傳播距離遠、衰減小等特點而較適合于遠距離探測(600 km),因此目前的雷電定位系統大多采集的是VLF信號。VLF信號在地面和高空電離層所組成的波導中傳播時,陡度會減小,這種狀況導致基于峰值檢測的傳統時差法定位誤差往往較大。近些年來,人們提出了兩種改進方法,即基于互相關理論的時差法和基于群到達時間法(Time of Group Arrival,TOGA)[7]。基于互相關理論的時差法通過計算到達不同探測子站信號的互相關函數,根據互相關函數最大值對應時刻確定雷電輻射信號到達子站的時間差[8];群到達時間法通過計算信號相位隨頻率的變化率來確定TOGA[10]。
一般而言,VLF信號對應于較大尺度的閃電放電過程,常用來確定云地閃的回擊點;VHF信號對應于較小尺度的擊穿過程,常用來研究雷電發展過程[11-12]。甚高頻時差法根據探測子站的距離可以分為長基線(20 km量級)和短基線(10 m量級)系統。雖然長基線系統定位精度較高,但由于需要多站同步觀測、不適用于多山地區觀測等原因,甚高頻短基線時差法成為當前雷電定位系統研究的一個熱點問題[13-14]。
孫竹玲等人采用甚高頻短基線雷電定位系統觀測了人工引雷和云間閃的二維圖像,通過高速光學相機拍攝結果對比,表明甚高頻短基線雷電定位系統具有較高定位精度[8];曹東杰等人采用甚高頻短基線雷電定位系統研究了雷電放電的預擊穿、梯級先導和回擊過程[14];Mashak等人計算了不同距離時甚高頻短基線雷電定位系統的定位誤差,結果表明快天線與先導之間的距離會顯著影響仰角測量誤差[15]。
本文介紹了甚高頻時差法定位原理和計算步驟,計算了不同距離、基線長度和放電路徑時方位角和仰角平均誤差,為下一步開發短基線時差法雷電定位系統提供參考。
1 甚高頻時差法定位原理
1.1 定位算法
短基線雷電定位系統至少需要3個寬帶平板天線,用于接受雷電放電輻射出的甚高頻信號,以3個天線為例,其布置如圖1所示。假設天線1位于(0,d,0)點,天線2位于原點O,天線3位于(d,0,0)點,其中d為基線長度。若VHF輻射源輻射出頻率為14.35 kHz、初相位為0的正弦信號,3個VHF天線接收到信號如圖2所示。放大時間軸,可以看到3個VHF天線接收到信號存在相位差,即存在到達時間差。
假定輻射源為點源且處于P3點,由幾何關系可知:
cos∠P3OA=cosαcosβ
(1)
cos∠P3OB=sinαcosβ
(2)
式中:α為方位角;β為仰角。
由式(1)和式(2)可得:
(3)
(4)
式中:c為電磁波傳播速度;ΔtT2T1為VHF信號到達天線T1和T2時間差;ΔtT2T3為VHF信號到達天線T2和T3時間差。
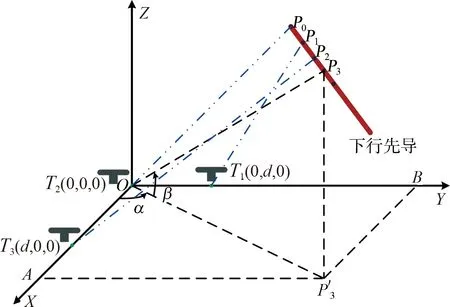
圖1 短基線時差法原理
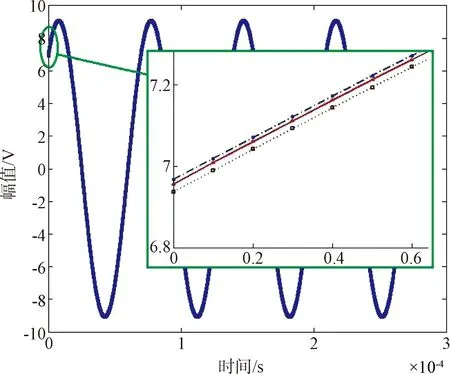
圖2 3個VHF天線接收到的信號波形
1.2 計算步驟
短基線雷電定位系統的定位計算原理為選取先導通道上某些特殊點代替先導通道,認為連續的先導通道輻射出的VHF信號近似等于這些特殊點源輻射的VHF信號之和,并計算每一個點源的方位角和仰角。其具體步驟如下。
a.假定P0為下行先導的起點,P1為先導通道上某一點,且滿足:
(5)
即點源P0輻射的VHF信號到達天線T2的時間等于點源P1輻射的VHF信號到達天線T1的時間與P0、P1間延遲時間之和。
b.選取先導通道上的另一點P2,滿足:
(6)
即點源P0輻射的VHF信號到達天線T2的時間等于點源P2輻射的VHF信號到達天線T3的時間與P0、P2間延遲時間之和。
c.選取先導通道上的第三點P3,滿足:
(7)
式中:Δd為2次采樣時間間隔內VHF信號傳播的距離。若采樣率為100 MSa/s,則Δd=3 m。
d.P3作為下一段先導通道新起點,重復步驟(a)-(c),直至下行先導的終點(即雷擊地面點)。
e.采用式(3)和式(4)計算方位角α和仰角β。方位角α和仰角β的準確值為(以P3為例)
(8)
(9)
式中:XP3、YP3、ZP3分別為P3點的X、Y和Z軸坐標。
2 結果與討論
2.1 定位誤差
為了驗證雷電定位計算方法的正確性,假定下行先導起點為(104,103,1200),下行先導終點為(105,105,0),基線長度為20 m。定義參數t為輻射點源和當前先導段起點或整個下行先導起點之間的距離與先導長度之比。
圖3為參數t隨迭代次數(重復1.2節步驟(a)-(c)的次數)變化曲線。從圖2可知,P1、P2和P3點和當前先導段起點距離與先導長度之比大多近似為0,只有在最后40次迭代時即臨近地面時才從0逐漸變化到1;而P3點和整個下行先導起點之間的距離與先導長度之比呈從0到1的線性增加趨勢。此結果與文獻[15]研究結果一致。
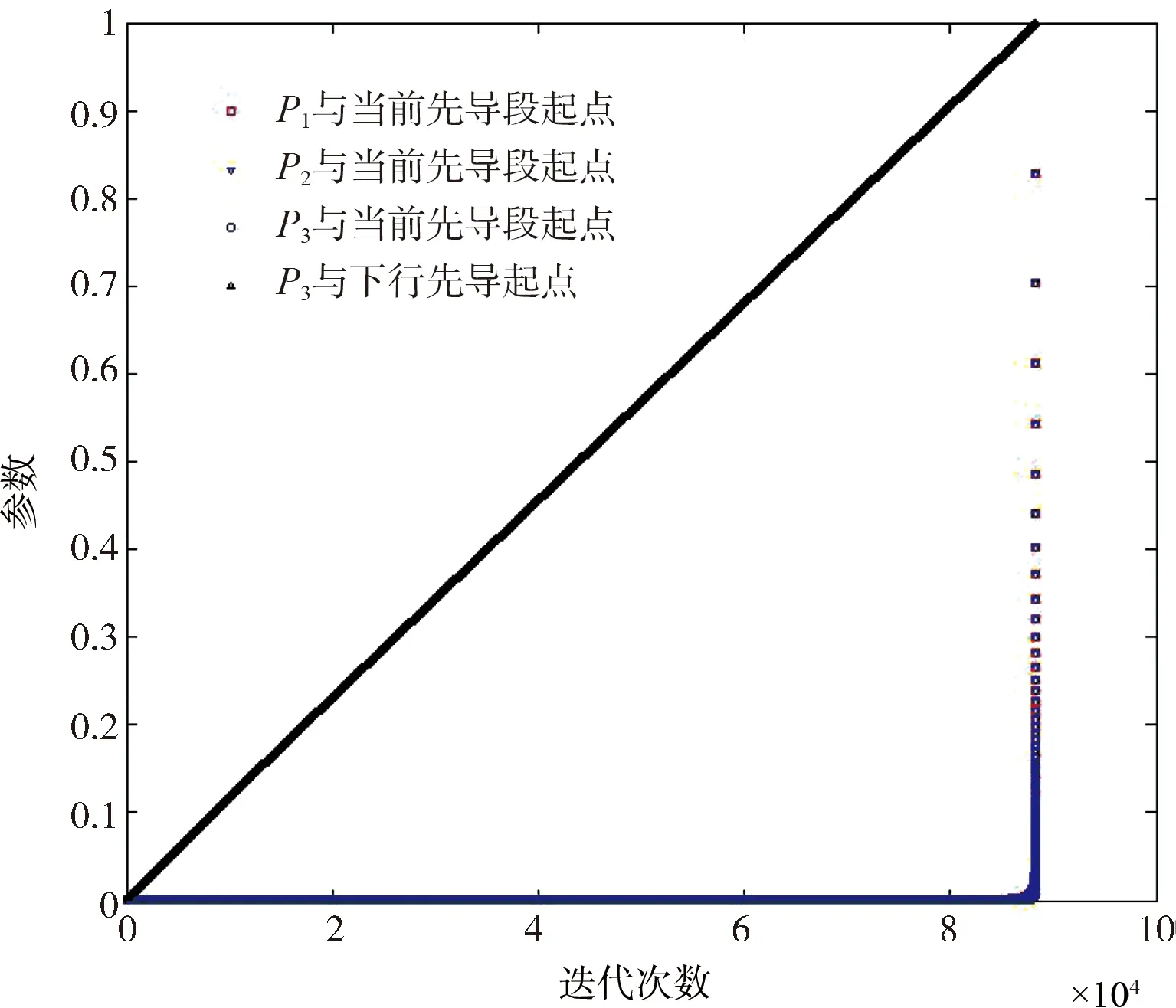
圖3 參數t隨迭代次數變化曲線
圖4和圖5分別為方位角和仰角隨迭代次數的變化曲線。從圖4可知,方位角在先導起點處較小,約為0.1 rad,臨近地面時較大,約為0.78 rad。與實際值即采用式(7)計算結果相比,方位角的計算值與實際值的誤差很小,小于0.0001 rad。從圖5可知,仰角在先導起點處較大約為0.12 rad,臨近地面時近似為0。與圖4相比,仰角的計算值與實際值的誤差較大,在臨近地面時誤差達到0.15 rad。
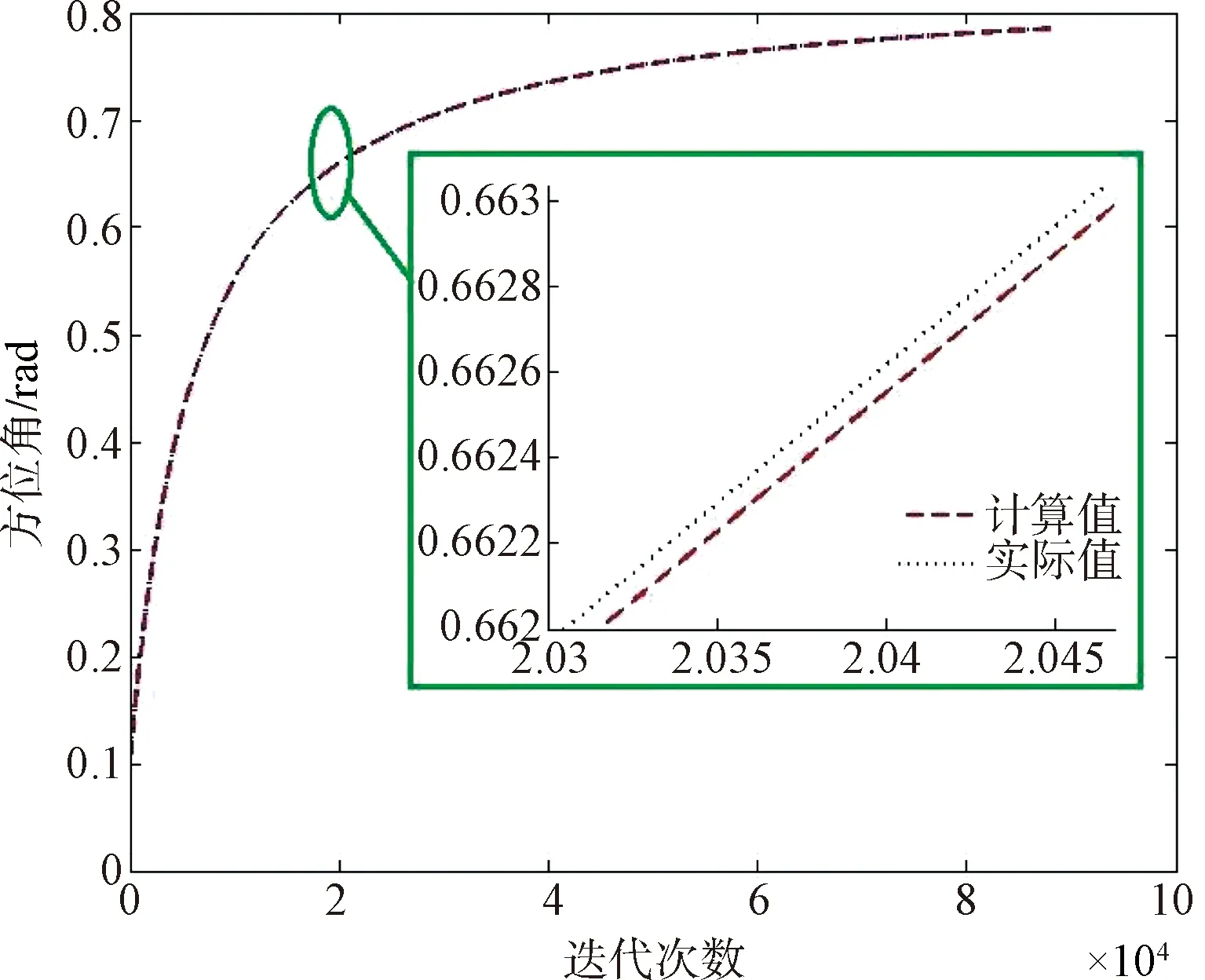
圖4 方位角計算值和實際值
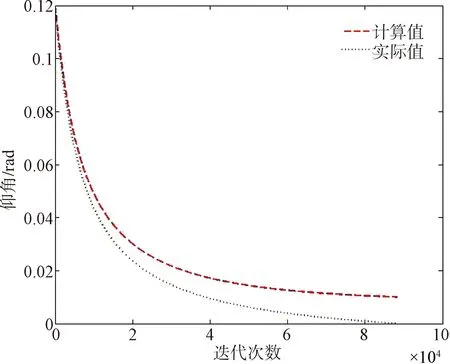
圖5 仰角的計算值和實際值
2.2 距離的影響
為了研究先導通道與天線的距離對定位精度的影響,選取30個先導通道:起點(i×103,i×102,1200),終點(i×104,i×104,0),其中i=1, 2,…,30。30個先導通道如圖6所示,通道1距離短基線雷電定位系統較近,通道30距離短基線雷電定位系統較遠。
圖7和圖8分別為方位角和仰角平均誤差隨距離的變化曲線。從圖7可知,方位角平均誤差隨距離的增大而減小。雷電通道1的方位角誤差為6.6×10-4rad,雷電通道30的方位角誤差僅為3.2×10-5rad。從圖8可知,仰角平均誤差也隨距離的增大而減小,但與方位角誤差相比,仰角誤差大一個數量級。雷電通道1的仰角誤差為13.9×10-3rad,雷電通道30的仰角誤差為5.4× 10-5rad。
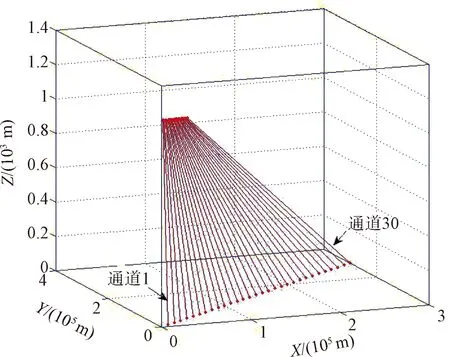
圖6 不同距離的30個雷電通道
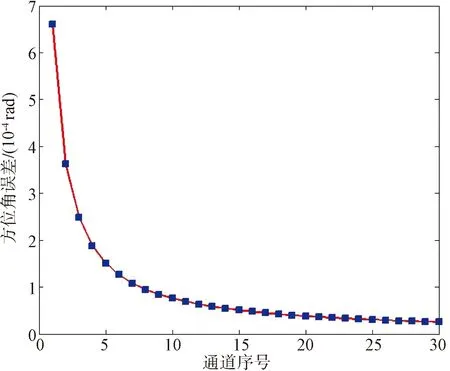
圖7 方位角誤差隨距離變化曲線
圖8 仰角誤差隨距離變化曲線
2.3 基線長度的影響
先導起點和終點與2.1節相同,基線長度從10 m變到40 m時,方位角和仰角的平均誤差隨基線長度變化曲線如圖9和圖10所示。
圖9 方位角平均誤差隨基線長度變化曲線
圖10 仰角平均誤差隨基線長度變化曲線
從圖9可知,方位角誤差隨基線長度的增加而增加。當基線長度為10 m時,方位角平均誤差為3.8×10-5rad;當基線長度為40 m時,方位角平均誤差為1.5×10-4rad。從圖10可知,仰角誤差也隨基線長度增加而增加。當基線長度為10 m時,仰角平均誤差為4.6×10-3rad;當基線長度為40 m時,仰角平均誤差為12.4×10-3rad。
2.4 閃電路徑的影響
為了研究不同閃電路徑對定位精度的影響,選取5個閃電路徑:路徑1(起點(104,103,1200),終點(105,105,0))、路徑2(由路徑1和分支通道2組成,分支通道2起點(5.5×104, 5.05×104,600),終點(5.5×104, 5.05×104,0))、路徑3(由路徑2和分支通道3組成,分支通道3起點(7.75×104, 7.525× 104,300),終點(1.5×105, 1.5×105,0))、路徑4(起點(104,103,1200)→拐點(5.5×104,1.5×105,600)→終點(105, 105,0))和路徑5(起點(104,103,1200)→拐點(1.5×105, 5.05×104, 600)→終點(105,105,0))。考慮分叉和曲折的5個閃電路徑如圖11所示,其中路徑2和3含有分支通道,路徑4和5為曲折通道。
圖11 考慮分叉和曲折的5個閃電路徑
不同路徑時定位誤差如表1所示。從表1可知:①路徑2的方位角和仰角誤差與路徑1近似相同;②路徑3的方位角誤差比路徑1小,仰角誤差比路徑1大,其原因為路徑3包含分支通道3,分支通道3離天線距離較遠,故方位角誤差較小,而分支通道3離地面較近,故仰角誤差較大;③路徑4的方位角和仰角誤差均比路徑1小;④ 路徑5的仰角誤差比路徑1小,而方位角誤差比路徑1大,其主要原因為方位角α誤差與sinα成反比,路徑5的sinα較小,故方位角誤差較大[8]。
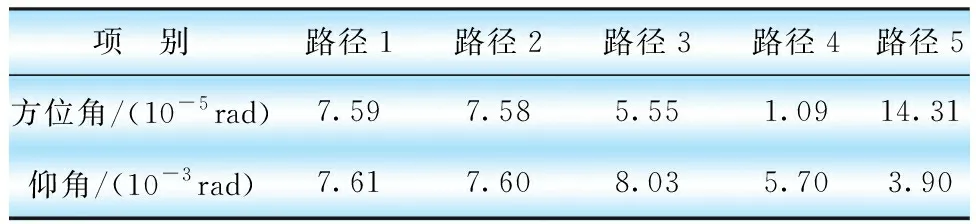
表1 不同路徑時定位誤差比較
3 結論
a.方位角誤差較小,仰角誤差通常較大,臨近地面時仰角誤差最大。
b.方位角和仰角平均誤差均隨著距離的增大而減小。
c.方位角和仰角平均誤差均隨著基線長度的增加而增大。
d.閃電路徑含有分叉時或者為曲折放電路徑時,方位角和仰角誤差與分支通道位置和曲折方向有關。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06