三維激光掃描儀在礦山復雜地形測量中的應用
2021-06-23 10:08:34陸萬杰董英平萬世斌歐東張郁山逯登棟
世界有色金屬 2021年21期
陸萬杰,董英平,萬世斌,歐東,張郁山,逯登棟
(青海黃河礦業有限責任公司,青海 西寧 810000)
在礦產資源開采過程中,使用的傳統測量儀器有GPSRTK和全站儀等,都是單點測量的方式,這樣的測量方式,測量精度受人為因素的影響較大。通過調研,各礦山的方量驗收的誤差取2%作為經驗值,即月驗收累計方量和年度復核方量的差值占月驗收累計方量的2%,比如開采1000萬方礦石,可能會流失20萬方。為了實現礦山精細化管理,減少因為測量誤差造成資源貧化等問題,夏日哈木礦山引進了三維激光掃描儀來控制方量驗收的誤差,并且可為實現智慧化礦山從二維平臺轉到三維實時動態展示提供三維實景模型。
三維激光掃描技術是20世紀90年代中期開始出現的一項高新技術,是繼GPS空間定位系統之后又一項測繪技術新突破。它通過高速激光掃描測量的方法,大面積、高分辨率地快速獲取被測對象表面的三維坐標數據。可以快速、大量的采集空間點位信息,為快速建立物體的三維影像模型提供了一種全新的技術手段。由于其具有快速性,不接觸性,實時、動態、主動性,高密度、高精度,數字化、自動化等特性,其在礦山的應用推廣非常有必要的。
為了確保三維激光掃描儀能夠在礦山順利投用,需要對掃描儀進行精度驗證,保證數據的可靠性。本文首先分析了三維激光掃描儀的工作原理及流程,再利用三維激光掃描儀對廠區內一處山包進行測量,并建立三維模型,將模型對照實地進行分析;然后從模型中提取高程點,利用萊卡全站儀對提取高程點進行精度驗證,為三維激光掃描儀在礦區應用提供依據。
1 激光掃描測量技術的原理
該掃描儀采用的是脈沖式激光測距的原理,利用非接觸式高速激光測量,以點云的形式測得被測物體表面矩陣式的三維數據。硬件設施主要包括掃描儀主機(脈沖式激光器、時間計數器、馬達控制系統、測量型望遠鏡、內置數碼相機)、電源及外業測量平板電腦。

圖1 三維激光掃描儀主機

圖2 外業測量手簿
該掃描儀儀器主要參數見表1
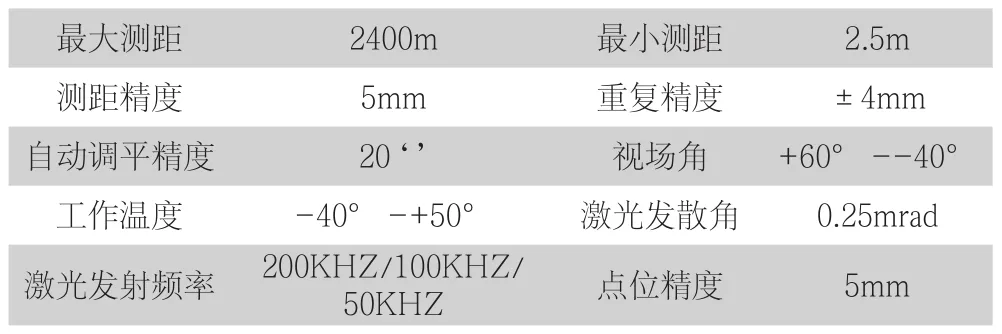
表1 三維激光掃描儀主要參數
其工作原理主要有測距、測角兩個方面。
(1)脈沖式測距:通過記錄發射和接收脈沖信號的時間差ΔT來計算出被測物體的距離S(光速為C)。

(2)測角:該掃描儀工作時進行水平和垂直方向掃描,通過時鐘控制編碼器測量激光脈沖橫向掃描角度觀測值α和縱向掃描角度觀測值β。
測得被測物體的距離S、激光脈沖橫向掃描角度觀測值α和縱向掃描角度觀測值β后,再利用極坐標系與笛卡爾坐標系之間的相互轉換關系計算出目標點的X,Y,Z坐標。最終成千上億帶有三維坐標和反射率信息的點在電腦上呈現出真實尺寸的環境信息。


圖3 目標點三維坐標計算圖
2 三維激光掃描儀的測量流程
利用三維激光掃描儀進行地形測量主要分為外業點云數據采集和內業點云數據處理,具體工作流程如圖4。
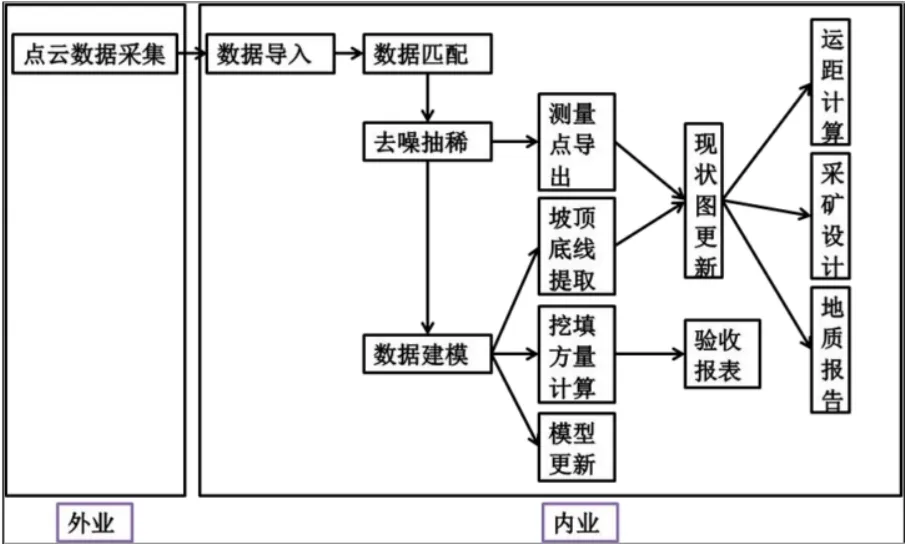
圖4 測量流程圖
(1)外業點云數據采集:點云數據采集時包括測站點選取、控制測量、點云采集三步。測站點選取時根據被測地形的實際情況均勻分布,對于復雜地形可多設站,考慮測站之間的銜接,避免出現掃描死角,盡可能提高掃描覆蓋率,并且站點不能設置太遠,必須在掃描儀的有效掃描距離內,還必須設置合理的站數,站數如果選擇少了,就會出現掃描盲區,拼接后的數據有黑洞,如果站數過多,就會降低掃描效率,增加掃描時間,也會積累拼接的誤差,所以應該根據實際情況,設置盡量少且合理的站數,獲得最佳的掃描結果。測站點選定后可由GPS-RTK測得測站點絕對坐標,再通過后視定向原理為儀器設定好坐標系,后視點選取時盡量選取在地勢較高的位置,做到盡可能多的測站用到同一后視點,以防止后視坐標產生的誤差影響后期數據拼接。待三維激光掃描儀在礦山正式投用后可以考慮在較高位置設置永久后視點,來減少后視點的誤差對測量精度的影響。最后在手簿中設置氣壓、溫度、天氣、光照強度等參數,保證激光測距的精度,最后再由儀器進行360°旋轉獲取點云數據。
(2)點云數據處理:點云數據處理包括數據匹配、去噪抽稀和數據建模。將數據導入配置的數據處理軟件中,分析掃描數據,查看分層情況,如出現數據分層,可通過配準功能將分層數據進行匹配。去噪抽稀是將掃描過程中現場存在的人員、設備、粉塵等噪點過濾,主要的方式有地形過濾、按最小間隔過濾、特征點過濾、近程過濾等。數據建模是通過大量的點云數據形成數字地形模型,實現該功能的主要方式有地形三角網、消峰、孔洞填充等。
3 三維激光掃描技術的特點
三維激光掃描技術是一種利用激光測距的原理,通過掃描得到三維立體空間數據的非接觸式主動測量系統。相對于傳統的單點測量系統,三維激光掃描儀可以對被測物體的面進行測量,因此其在復雜的空間環境中的表現力更強。測量后的點云數據可以直接導入到計算機軟件中,從而快速獲得被測物體的三維模型,進行點、線、面和量的數據提取。三維激光掃描技術有如下特點:

表2 全站儀精度驗證結果表
(1)精確度高。傳統的攝像測量是根據像控點的坐標來建立模型上個點的坐標,因此點位測量精度與像控點的精度和位置密切相關。三維激光掃描儀獲得的點云精度一般高于攝影測量中的解析點,且精度分布均勻。此外,三維激光掃描技術還可以避免表面近似誤差的問題。為實景三維模型的建立提供了更加精細和可靠的三維數據,推動真三維實景。
(2)環境影響因素小。傳統的測量方法考慮操作性和測得數據真實性,一般不能在夜晚進行作業,而三維激光掃描技術獲取掃描物的點云數據是通過接受自身發射的激光回波信號,因此不受時間和空間的約束,延長了測量時間和擴大了測量領域。
(3)數據覆蓋率高。對于傳統的測量方法和儀器,如全站儀、GPS-RTK等,在測量地形時,只能測量地形特征點,該類方法在地勢險峻地區和地形起伏較大的區域勘測阻力較大,難以保證工作的全面覆蓋,三維激光掃描技術通過采集高密度、高分辨率的海量點云數據解決了這一難題,三維激光掃描儀的脈沖激光在數秒內可以采集成千上萬個點,這使我們突破了單點模式,可以獲得更多的物體空間信息,在兼顧測繪精度要求的同時,快速、高效地解決測繪過程中存在的邊界不客觀、不符合實際情況等問題。
(4)非接觸式測量。除了傾斜攝影的測量方式,其他傳統的測量方法都必須靠近被測物體,甚至必須接觸到被測物體才能夠進行測量,但三維激光掃描技術利用激光測距技術,可在2KM外采集物體表面的三維信息數據。這種非接觸掃描目標的測量方法能夠測量有潛在安全風險、人員無法接近的環境,在安全和經濟方面發揮重要作用。
(5)數據實用性和兼容性較好。礦山生生產活動本身就是在一個三維動態的空間環境上進行的,通過三維激光掃描儀進行外業數據采集后,生成的數字高程模型,可以將礦山的儲量計算、采礦設計、計劃編制、生產管理等活動從二維空間轉變到三維空間模型上,相比通過平面圖、剖面圖進行管理具有簡單、直觀的效果。并且可根據需求進行點、線、面操作,生成不同部位、不同比例尺的圖件,輸出成果能與南方CASS、ArcGIS、Dimine等軟件相結合處理。
4 測量實驗
本次實驗在廠區選擇一處山包進行掃描測量,利用萊卡GPS-RTK獲取測站點坐標,控制點采用廠區內四等平面控制網。測量前先對山包整體情況進行查看,選擇大致的測站點位置,再按測量流程對山包進行測量,掃描完成后生成模型,和現場拍攝的照片進行對比,大致檢查生成模型的準確性。
如圖5、圖6,掃描所得模型完全符合現場實際情況,展現了山包的小溝壑和紋理特征,測量細節表現力極強,由此可得,三維激光掃描儀尤其在對復雜地形的測量具有很大優勢。另外掃描時不僅測量了三維坐標信息,同時采集了被測物體的影像信息,可滿足使用者的不同需求。
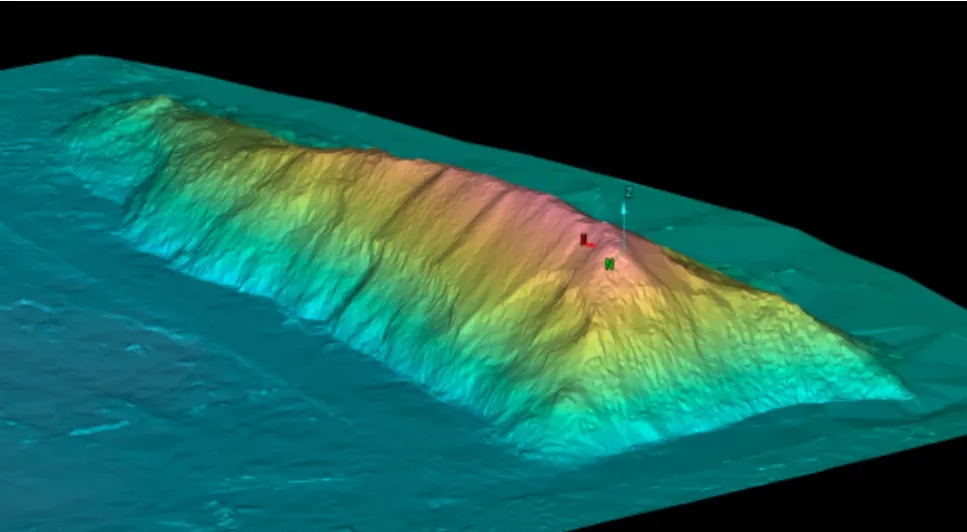
圖5 建成的模型

圖6 現場實際照片
5 利用全站儀精度驗證
為驗證掃描儀測得模型的準確性和可靠性,依據《三維地理信息模型數據產品規范》(CH/T 9015—2012),本文引入中誤差,通過從掃描的模型中提取13個點,利用萊卡全站儀進行精度驗證。計算公式為:

式中,Mz為高程中誤差;Δ為檢測較差;n為檢驗點總數。
在相同控制網基準下,利用萊卡全站儀對模型中提取的坐標進行放樣,并測得放樣點的高程,測得結果如表2。
經計算,z方向檢測較差最大值為24mm,最小值為-14mm,平均值為8.2mm,中誤差為12mm;現場分析原因是山包質地較軟,利用棱鏡測量時有下陷的可能,總體分析三維激光掃描儀測量所得的模型,模型成果滿足1:500地籍測圖精度要求。
6 結論
通過萊卡全站儀對三維激光掃描儀測得的三維模型進行精度驗證,三維激光掃描儀用于地形測量滿足地形測量的精度要求,并且掃描儀在地形測量是可不受時間、空間限制,隨時獲取目標物體表面的三維信息,尤其在復雜地形測量方面,掃描儀可以真實反應出地表情況,能夠將地形的每一處小溝壑進行測量,真正做到了實景復制,為采出的礦量提供了更加精確的數據。三維激光掃描儀在礦山投用后將在礦山規劃設計、建設生產、礦山資源儲量管理方面發揮重要作用。
隨著測繪技術的不斷更新,各種生產活動所需要的基礎數據也從抽象到真實,從靜態到時序,從靠人理解到人機兼容理解,從平面到立體,從按要素、分尺度到按實體、分精度,從陸地表層到全空間的方向改變著,全新的需求體系帶來了前所未有的挑戰,現實問題正在倒逼產業加速升級。此外,如何高效獲取更直觀的三維展示成果及減少數據冗余等問題仍是今后探索的趨勢。
三維激光掃描技術在礦山的應用將推動礦山生產的精細化管理。并且該技術在文物古跡保護、建筑、規劃、土木工程、工廠改造、室內設計、建筑監測、交通事故處理、法律證據收集、災害評估、船舶設計、數字城市、軍事分析等領域也有了很多的嘗試、應用和探索。
猜你喜歡
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
北京測繪(2020年12期)2020-12-29 01:37:18
礦產勘查(2020年7期)2020-12-25 02:43:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
電測與儀表(2016年9期)2016-04-12 00:29:52