礦山工程測量中無人機機載激光雷達的應用效果分析
2021-06-23 10:08:24冀曉彤
世界有色金屬 2021年21期
冀曉彤
(甘肅煤田地質局一四九隊,甘肅 蘭州 730020)
近幾年來,隨著我國測量技術的發展,礦山工程勘測的數量也在逐年增加。通信、計算機技術的優化和完善,提升了勘測結構的完整度和嚴謹性,促使礦山工程勘測取得較好成果。但是目前階段,由于開采次數增加,部分施工團隊存在不規范的操作行為,導致礦山自然災害頻發。面對當前的發展現狀,在測量之前需要對礦山工程進行有效勘探,確保工程實施的穩定[1]。現如今,無人機廣泛應用在社會各個領域,并且取得了較好的成果,隨著技術的精進,無人機的自動化巡檢手段以及機載能力也得到了極大地提升,通過裝載不同型號的機器,完成相應的工作任務[2]。礦山的地質測量可以應用無人機機載雷達,將沒有角度關聯限制的激光雷達與無人機結合,通過繪制三維地圖的方式對地形路線作出記錄反饋,從而進一步完成巡檢目標任務。但是,隨著激光雷達功能性能的增加,給無人機的運行造成了一定的壓力,所以在實際應用過程中,出現了較多的問題和缺陷,影響礦山工程勘測的結果[3]。因此,通過多角度、多層級的設計,對礦山工程測量中無人機機載激光雷達的應用效果進行分析,調整傳統的應用模式,減少干擾性數據,確保運行方向和軌跡的正確性,提升測量精度值,同時可以更加快速地獲取礦山具體位置,以此提升無人機機載雷達對礦山探測的效率和質量。
1 礦山工程測量中無人機機載激光雷達的應用效果分析
1.1 確定區域波形初始特征參數
為了進一步明確激光雷達對礦區不同巖性圖像特征的分析,在礦區的基坑內部設立相應的探測點,并將勘測位置選擇在礦區基坑內部鉆孔口處,在一定程度上可以減少外部因素對無人機勘測的影響,同時也能減少對雷達勘查結果的影響。選擇150Mhz的路面耦合天線進行信號測量,將無人機的介質參數設定為15.34~20.35之間。依據勘測范圍,建立6個對應測量點,并且每一個測點之間的距離保持在8m,測深為55m。無人機的測量模式更改為步進式連續探測,當無人機機載激光雷達獲取到相應的勘測數據后,由最后一個勘測點進行處理。處理探測點的初始數據,計算測量目標體的綜合系數,具體如公式1所示:

式中:H表示測量目標體綜合系數,s表示探測的實際范圍,f表示可變目標。通過計算,可以得出實際的測量目標體綜合系數。根據數值結果明確相應的目標體,并且利用雷達獲取礦區的區域特征波形,在此基礎上計算初始特征參數,如公式2所示:

式中:L表示初始特征參數,θ表示濾波長度,s表示覆蓋總距離,通過以上計算,最終可以得出實際的初始特征參數,完成指標參數的確定。
1.2 耦合網度控制
確定礦區區域波形初始特征參數后,對耦合網度進行控制。當無人機飛行至礦區工程上方時,天線會向其發動區域波形,雷達在接收波形之后,會置換為耦合指令,傳輸至無人機控制平臺。所以,需要對置換比例進行計算,如公式3所示:

式中:J表示置換比例,a表示傳輸距離,g表示允許出現的誤差距離,h表示符合覆蓋范圍。通過計算,可以得出實際的置換比例,依據比例將波形轉換為對應的耦合指令,添加至無人機控制系統中,關聯無人機應用節點,形成與勘測范圍一致的耦合網度。依據實際的勘測情況,計算此時應調控的耦合網度,如公式4所示:

式中:K表示實際調控的耦合網度,V表示控制程度,E表示雷達勘測縱軸距離。通過以上計算,可以得出無人機實際調控的耦合網度,根據數值結果對應耦合網度進行控制。
1.3 有限單元法實現礦山工程測量
完成耦合網度控制后,利用有限單元法實現無人機機載激光雷達對礦山工程的測量。當雷達獲取到相關探測數據后,更改運行程序,具體如圖1所示:
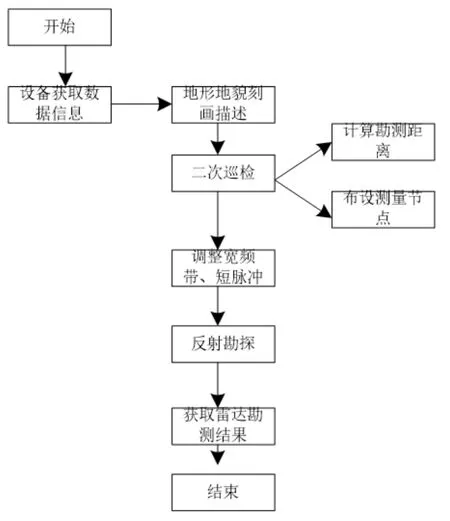
圖1 雷達運行程序結構圖
根據圖1可知雷達程序的相應結構。在此基礎上,將寬頻帶和短脈沖以縱向的形式發射高頻電磁波,以冗余電波作為介質,形成反射勘探。反射信號經由信道傳輸至控制平臺,利用有限單元法計算出對應的單元強度,如公式5所示:

式中:N表示單元強度,C表示勘測總距離,ω表示變化系數,R表示介電質數。通過計算,可以得出實際的單元強度。以強度結果作為標準,在數值可控范圍內分析數據信息完成最終測量,并對測量結果作出結論。
2 實例分析
2.1 無人機機載激光雷達在礦山測量中的應用現狀簡述
現如今,無人機的應用領域越來越廣泛,更是逐漸成為礦山測量的主要勘測工具。礦山勘測是對礦山的地貌依據地勢地形進行記錄勘查,同時對部分開闊區域進行數據粗略測量,雖然可以達到預期的目標,但是在實際應用過程中,還會存在一些問題和缺陷。例如,勘測效果圖不清晰不能有效識別地貌與地形,數據測量結果不準確導致最終應用出現誤差等。小型礦山開采工程應用效果相對較好,但是面對大型工程會存在一些變化,在這樣的發展現狀下,需要重新對無人機勘測技術進行創新調整。
2.2 分析過程以及結果
了解上述應用現狀后,依據實際情況進行具體分析。選取Q礦區作為分析對象,礦區的側方與迅達大道交叉,并且安裝多個內徑為1.5m~2.5m,頂管壁厚為0.3m的水管道,部分礦洞的高度為67.01m~82.94m。依據標準,將無人機調整至最佳狀態,并且設置激光雷達,具體設置為:雷達的檢測范圍在50.69m~120.37m之間,冗余長度為20.35m,數據保存時間為1周,雷達的實際覆蓋面積為300.65m2。測試時將雷達放置在無人機的機座中,關聯無人機操控系統,結合無人機和雷達的操控系統。開始勘查,使無人機在礦山的標定位置上空飛行3圈,每一圈的長度不同,獲取數據信息后,對礦山工程的相關指標進行航測,并分析測量結果,最終得出相對應的數據,具體分析結果如表1所示:
根據表1中的數據信息得出實際結論:在不同的航測距離下,無人機機載雷達對礦山工程各項指標系數測量總誤差均在0.2以下,表明其應用效果較好,具有一定的實際應用價值。
考慮到礦山待測量區域地形復雜,遮擋物較多,采用傳統的測量方式會出現頂面數據缺失的情況。礦山測量中采用無人機機載激光雷達,無需布置飛行航線,低空飛行時可捕捉到被遮擋部分的相關數據信息。激光雷達探測覆蓋范圍面積更大,測量數據采集的整體性要優于其他設備,在高空狀態下無人機搭載雷達收集數據的精準度較高。從表1可以看出,三組航測數據誤差控制在0.03~0.05范圍內,說明殘差值控制良好,可以滿足礦山大比例尺測量精度的要求。
3 結語
綜上所述,通過分析礦山工程測量中無人機機載激光雷達的應用效果,提高其應用價值。近幾年來,無人機被應用在社會各個領域中且均取得了較好的應用效果,在礦山工程測量中,利用無人機機載激光雷達進行位置確定以及地形測量,在工程實施的前期,掃清相關障礙,根據雷達刻畫記錄對應的地勢特征、地貌情況,部分開闊區域還可以利用測量設備作出粗略計量,以此減少工程測量的工作量,確保工程的順利實施。
猜你喜歡
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產勘查(2020年7期)2020-12-25 02:43:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
太空探索(2016年6期)2016-07-10 12:09:06
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43