基于改進Ortega觀測器的內置式永磁同步電機無位置控制
2021-06-22 01:33:52王奇翔姜淑忠
微特電機 2021年6期
王奇翔,羅 響,朱 莉,姜淑忠
(上海交通大學 電力傳輸與功率變換控制教育部重點實驗室,上海 200240)
0 引 言
內置式永磁同步電機(以下簡稱IPMSM)由于具有效率高、結構簡單、動態響應快等優點,在電氣傳動中得到廣泛應用[1]。在電機控制中,精確的位置信息對于實現高效控制至關重要。通常來說,位置信息是由高精度的位置傳感器獲得,如編碼器、旋轉變壓器等。然而,這些位置傳感器往往會導致成本、體積和系統復雜度的增加,同時也一定程度地降低了系統的可靠性[2]。
因此,近年來,電機的無位置傳感器控制技術發展迅速,其主要可以分為兩類:基于反電動勢觀測器的無位置控制和基于高頻信號注入的無位置控制[3-4]。前者一般用于中高速范圍內的電機控制,后者一般用于低速甚至零速范圍內的電機控制。基于反電動勢觀測的位置觀測器有滑模觀測器[5-6]、全階觀測器[7-8]、基于擴展卡爾曼濾波觀測器[9-10]、基于模型參考自適應(MRAS)觀測器[11-12]等。
Romeo Ortega等針對表貼式永磁同步電機提出了一種簡單的基于反電動勢的非線性位置觀測器,并證明了觀測器的穩定性[13],這種觀測器易于調整(只有一個系數),且對電機參數不敏感,但這種觀測器只適用于表貼式永磁同步電機[14]。由于IPMSM的直軸電感和交軸電感不相等,在電機凸極率較低的情況下,Ortega觀測器將有較大的誤差,但當電機的凸極率很大時,角度的估計誤差將使觀測器不再可靠。之后,文獻[15]對該觀測器進行了改進,通過合并角度的方式改進電感矩陣,并將改進的電感矩陣代入到原有的非線性觀測器方程中,這樣就可以獲得IPMSM的轉子位置信息。但改進的電感矩陣太過復雜,同時需要在每個控制周期內進行更新,不利于計算。文獻[16]應用高通濾波器將有效通量轉換為新的線性回歸形式,從而使改進的觀測器能獲得IPMSM的位置信息,但是觀測器方程仍然非常復雜。
本文基于等效磁鏈對Ortega觀測器進行了改進,使之能運用到IPMSM上,改進后的觀測器方程簡潔直觀,且只有一個可調整系數(觀測器放大系數)。
首先,基于IPMSM的電壓磁鏈方程的等效磁鏈形式,建立了改進的觀測器方程,分析了該觀測器的穩定性,進而用鎖相環得到了電機的速度。然后,在仿真平臺對該改進觀測器進行了仿真。最后,在相應實驗平臺上對利用該觀測器的無位置控制策略進行了實驗驗證。
1 IPMSM的改進Ortega觀測器
1.1 改進Ortega觀測器方程
圖1展示了一個簡化的三相IPMSM的驅動系統原理圖。圖1中的驅動器為一個三相電壓源逆變器,其由6路開關信號C1~C6控制。
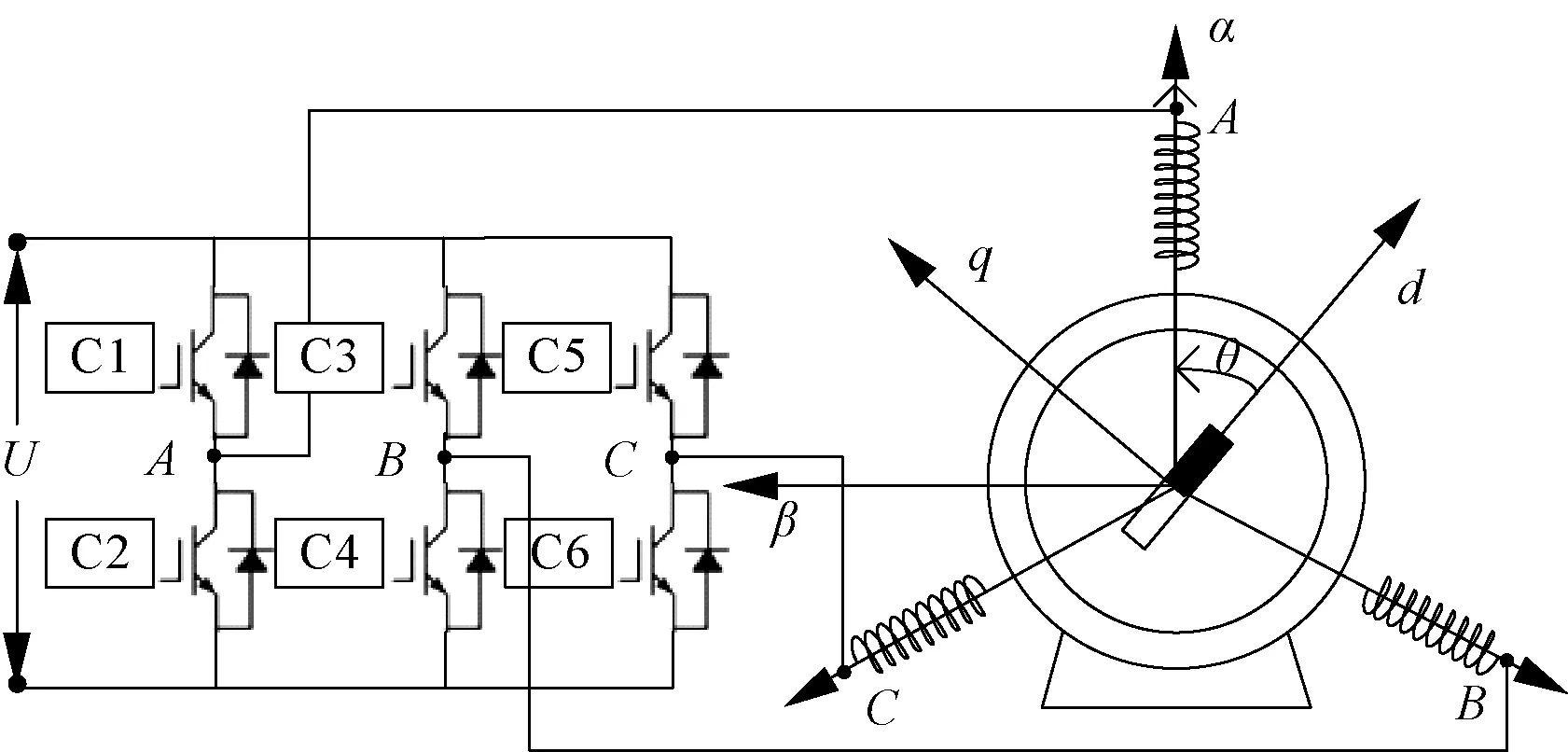
圖1 三相IPMSM驅動系統原理圖
一般的,永磁同步電機(以下簡稱PMSM)在α,β靜止軸的電壓磁鏈方程可以表示:
(1)
(2)
式中:uαβ為α軸和β軸的定子電壓矢量;iαβ為α軸和β軸的定子電流矢量;p為微分算子;Ls(θ)為電感矩陣;L0=(Ld+Lq)/2為均值電感;ΔL=(Ld-Lq)/2為差值電感;Rs為定子相電阻;Ld和Lq分別為d軸和q軸的電感;ψf為永磁磁鏈。
根據式(1)、式(2),不難得到如下形式的電壓磁鏈方程:
(3)
將其進一步化簡,可以得到:
(4)
令等效磁鏈ψm=ψf+(Ld-Lq)id,有:
(5)
這樣就得到了IPMSM在α,β軸上的基于等效磁鏈的電壓磁鏈方程。
為了得到改進Ortega觀測器,首先定義一個新的狀態變量:
(6)
令:
y=uαβ-Rsiαβ
(7)
則可以知道y不包含未知項,根據式(5),有:
(8)
為了建立觀測器方程,定義一個矢量函數η:2→2如下:
(9)
根據式(9),可以知道:
(10)
由此建立觀測器:
(11)

首先,由式(11)可以知道:
(12)
因此定義:
(13)
由此得到觀測到的位置:
(14)
1.2 穩定性分析
(15)


文化復興已成為國家戰略,滎經黑砂獨特的文化品牌又一次迎來新的重大機遇。“一帶一路”等戰略的提出,我國與沿線國家在文化領域合作不斷深入,黑砂文化將走出國門,成為雅安、中國的名片。同時,在雅安市委、市政府也大力支持黑砂文化的保護與傳承,除了與美術院校開展合作,引進創意人才外,還積極編制“中國黑砂”城總體規劃,提出“以黑砂產業為核心,多元融合,創新發展”,打響“中國黑砂”品牌,以品牌效應帶動全域旅游,實現文旅深度融合發展,把滎經建設成為特色旅游目的地。

(16)
因此,等效磁鏈的估計誤差可以表示:
(17)
其中:

(18)
(19)
(20)
結合上述變換和式(13)中c(θ)的定義,不難得到以下等式:
(21)

(22)
1.3 速度觀測原理
為了得到轉速,實現速度的閉環控制,可以將觀測所得的位置信息作為輸入,利用鎖相環來得到轉子的速度,如圖2所示。
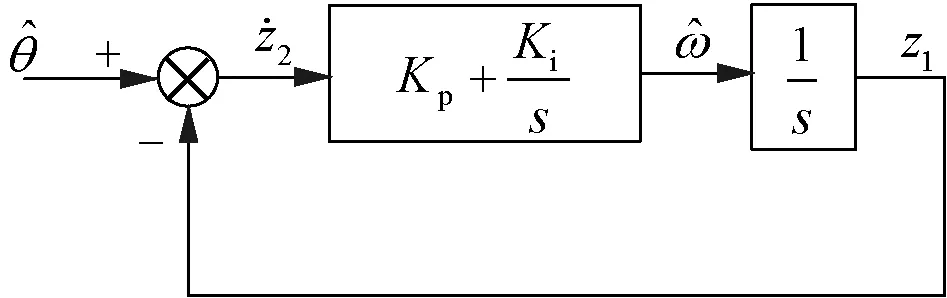
圖2 速度觀測原理圖
其方程:
(23)

2 系統仿真分析
仿真系統的結構如圖3所示。在每個控制周期,采樣三相電流并將其轉換到α,β坐標系,然后將iα和iβ以及uα和uβ輸入到觀測器,觀測器和鎖相環將計算出用于控制的電角度和速度。利用MATLAB/Simulink搭建仿真模型,仿真用IPMSM參數如表1所示。
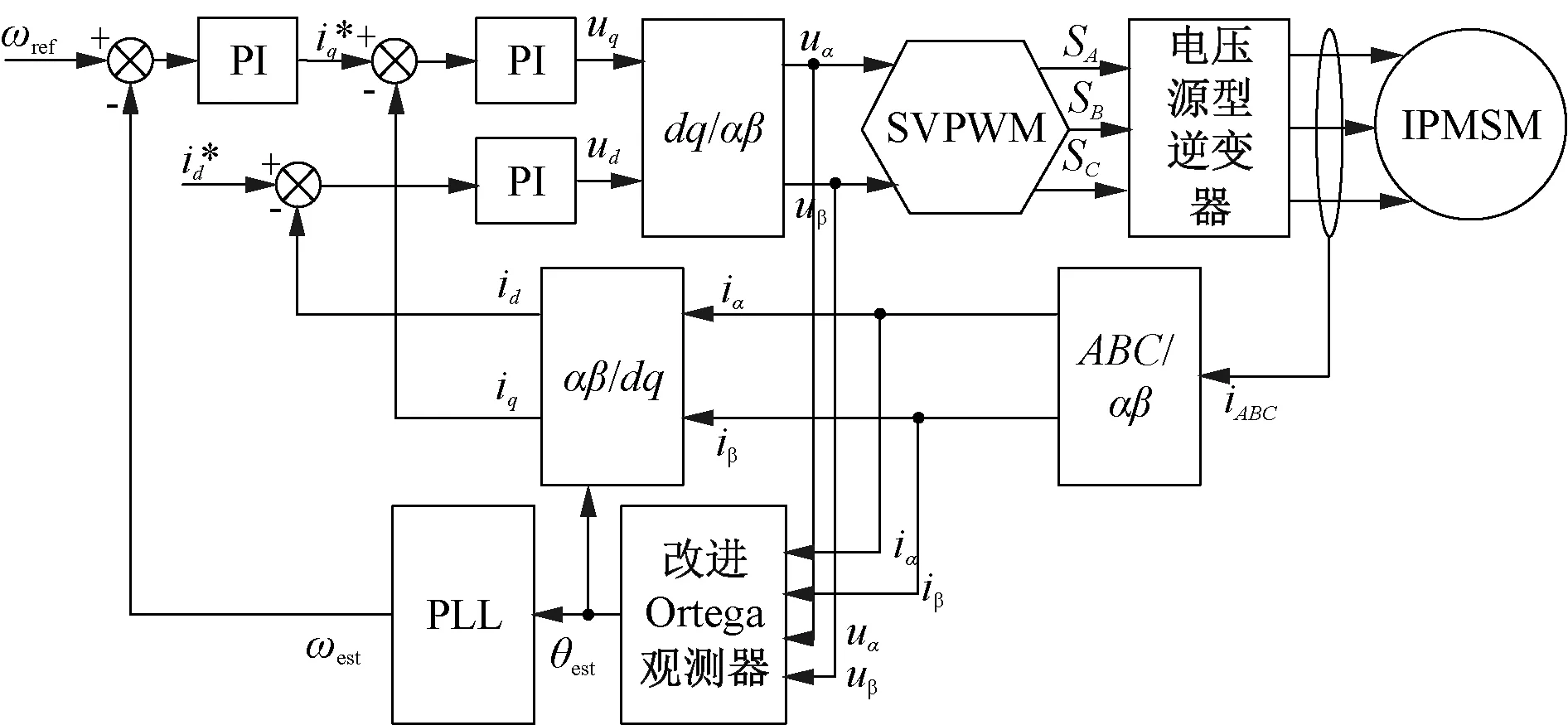
圖3 改進觀測器的IPMSM無位置傳感器控制系統結構
表1 仿真用IPMSM及控制系統參數
圖4分別展示了電機在速度指令和負載轉矩交替變化時的估計電角度和估計誤差、實際速度和估計速度和速度設定值以及負載轉矩和電磁轉矩的波形。觀測器放大系數設置為2 000,同時考慮到當電機起動時電機轉速不高,此時觀測器的輸出角度不可靠,所以在電機起動前0.1 s,FOC使用角度是實際的位置信息,在0.1 s之后才使用觀測器輸出的電角度。在0.4 s時,設定轉速由400 r/min下降至250 r/min,在0.6 s時,負載轉矩由6 N·m突然上升至10 N·m,可以看到,電機的速度觀測值始終跟隨速度設定值以及實際速度,且觀測值與實際值的偏差很小,但觀測值會略微滯后實際值,這可以從圖4(b)看出。同時,當速度運行在一個穩定點時,如0.3 s~0.4 s或0.8 s~1.0 s,電機的電磁轉矩會在實際負載轉矩附近小幅波動,在電機速度指令突然變化時,負載轉矩會有劇烈的變化。根據圖4(a)可以看出,在0.1 s~1.0 s整個過程中,觀測器輸出的觀測電角度都能較好地跟隨電角度實際值,且兩者的誤差在-15°~ 15°以內,在高速情況下觀測器的誤差范圍會比低速情況下更小,這和觀測器是基于反電動勢有關。同時,當電機的轉速和轉矩發生突變時,觀測器仍能輸出可靠的電角度估計值,這也證明了觀測器的魯棒性。
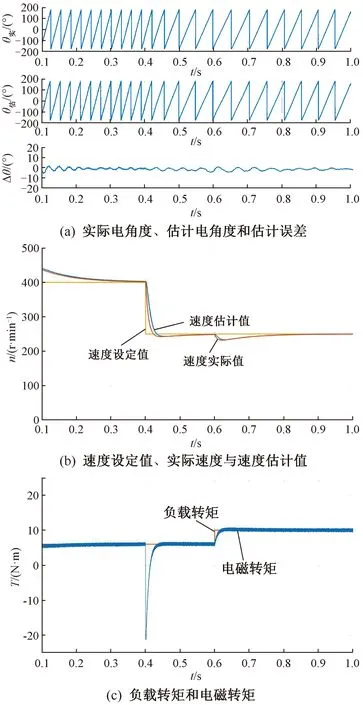
圖4 速度與轉矩交替變化下的仿真結果
本文的觀測器是在文獻[13]中針對表貼式PMSM觀測器的改進,在電機凸極率不高的情況下,使用Lq作為原觀測器的電感參數,使用原Ortega觀測器對電角度進行觀測。為了驗證改進效果,設計了如下仿真實驗,將文獻[13]中的觀測器用于IPMSM,與本文的觀測器進行比較,使用觀測誤差絕對值對時間的積分來直觀地表現觀測效果。在控制周期中使用的角度是電機的實際電角度。對比如圖5所示,圖5(a)是原有觀測器觀測誤差絕對值的積分與實際觀測誤差,圖5(b)是改進觀測器的實際觀測誤差。可以看出,改進觀測器能更快到達穩定,且其在穩定點的觀測誤差范圍也更小;同時,從兩個觀測器觀測誤差絕對值的積分來看,改進的Ortega觀測器積分值始終小于原有觀測器,這說明其整體的觀測效果也要好于原有的觀測器。這意味著基于等效磁鏈改進的觀測器已經能適用于IPMSM,且相較于原觀測器,有著更好的觀測效果。
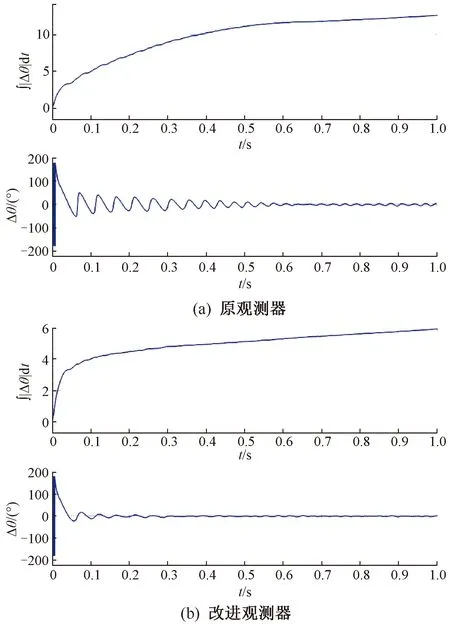
圖5 觀測誤差絕對值的積分與觀測誤差仿真結果
3 樣機實驗及結果分析
實驗平臺包括測試電機和負載電機以及基于DSP芯片TMS32F28335的驅動控制板和16位DAC模塊,如圖6所示。DAC模塊用以輸出觀測與實際的電角度以及估計與實際的速度等信號波形。測試電機的參數和仿真參數一致。
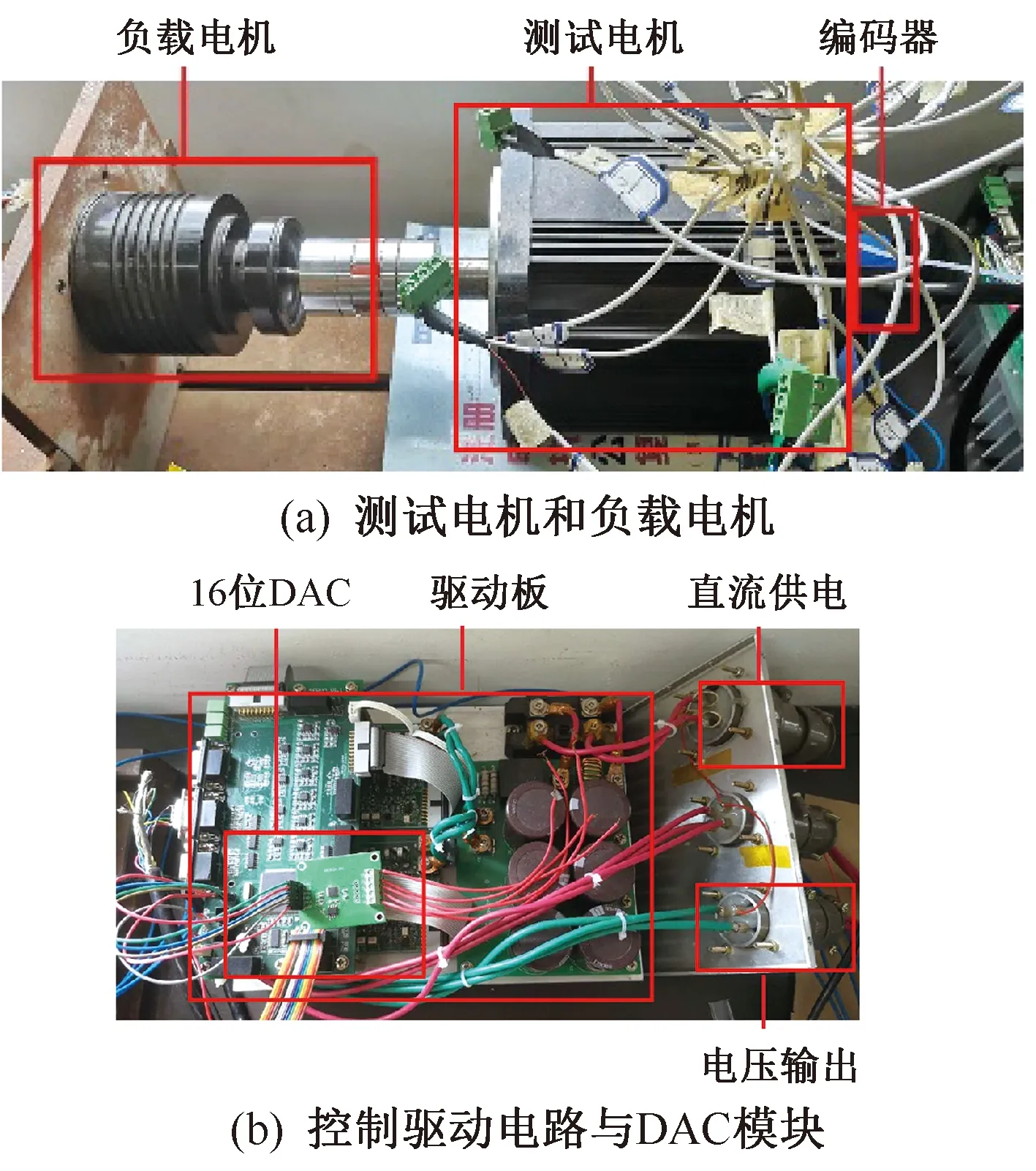
圖6 實驗平臺
圖7展示了電機運行在空載穩定速度時的估計電角度、實際電角度以及觀測器狀態變量的波形。這4個波形全部由DAC模塊輸出。電機在控制時使用的角度是實際電角度,電機轉速為180 r/min。可以看到,觀測器輸出的估計電角度能較好地跟隨實際電角度,同時觀測器的狀態變量也能以一個恒定的幅度作正弦振蕩。電機電角度的估計誤差由示波器內置函數計算得到,即實際電角度減去估計電角度。由于觀測器輸出的角度相對實際電角度有稍許的相移,所以在0和360°切換時估計誤差會有稍許的脈沖,脈沖高度接近360°,此時的誤差也可以認為很小,估計誤差在觀測器未并入FOC中時始終很小,觀測器都有良好的觀測效果。

圖7 空載180 r/min下的電角度與觀測器狀態變量波形
圖8展示了速度緩慢變化情況下的估計電角度、估計誤差、速度設定點以及速度觀測值的波形。估計誤差也是由DAC模塊獲取,同時被限制在-180°到180°之間,FOC使用的位置以及速度分別是由觀測器以及PLL輸出。速度設定值在0.4 s到1.4 s時由180 r/min平緩上升至300 r/min,可以看到,鎖相環輸出的速度估計值能跟隨速度設定值的改變而改變,但會相對有所滯后,同時在整個過程中,位置的估計誤差始終在5°以內。當電機的速度發生改變時,該觀測器有著良好的動態響應,也能維持優秀的觀測效果。當速度提升時,估計誤差也會隨之略有減小,觀測誤差的大小和電機轉速有著一定的關系,轉速越大,觀測器的估計誤差也會越小。
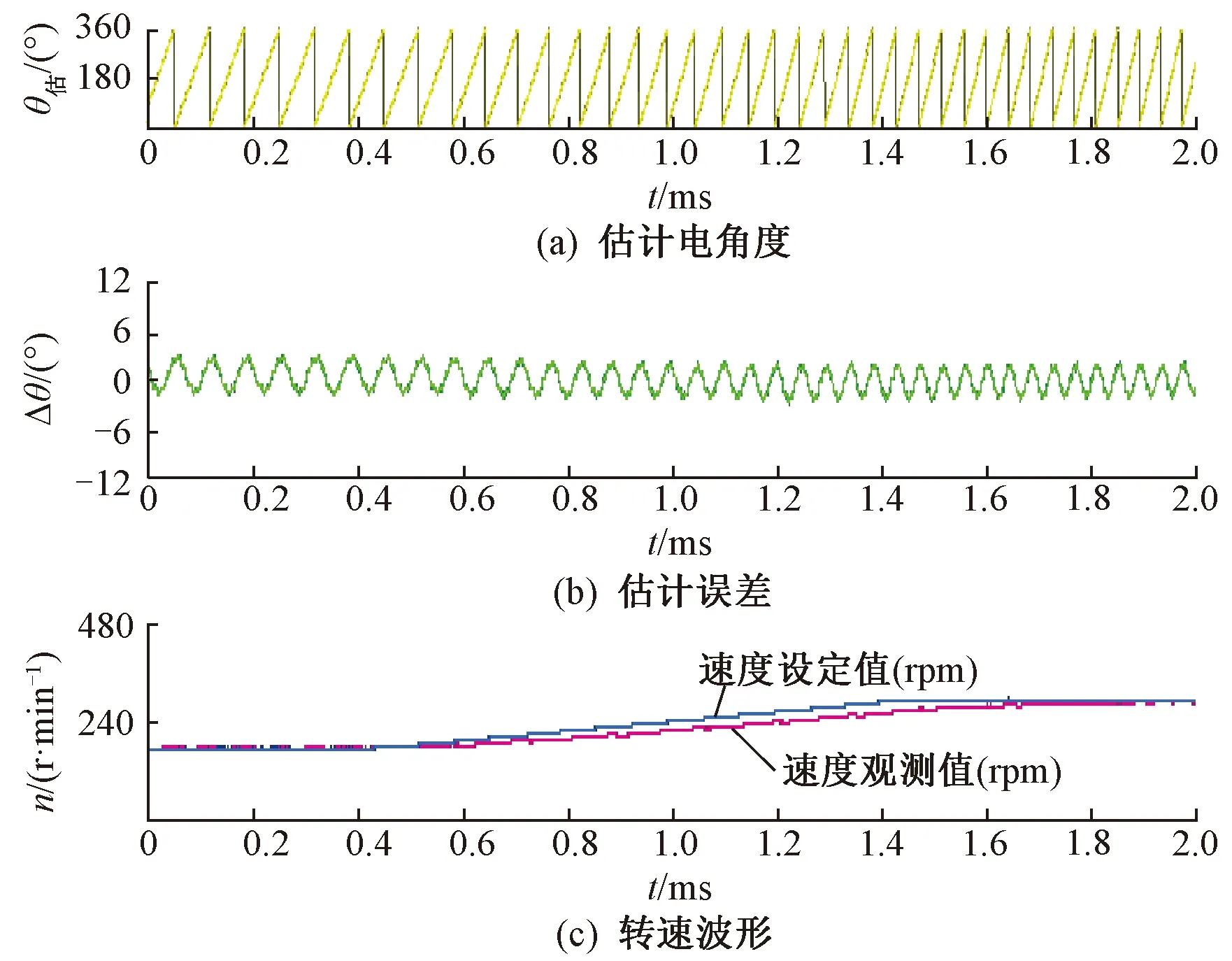
圖8 速度緩慢改變下的估計電角度與估計誤差以及轉速波形
圖9展示了電機在負載轉矩變化時的A相電流,估計電角度誤差,速度設定點以及速度觀測值的波形。速度設定值為180 r/min。在0到0.6 s,電機運行在空載狀態,在0.6 s到4.0 s,會有一個負載轉矩施加在電機上,此后電機又回到空載狀態。在負載轉矩增大時,A相電流幅值會增大,速度會有所下降,但很快能回到速度設定點,速度下降時觀測器的估計誤差也會隨之上升,當速度回到參考點時,電角度的估計誤差也會回到一個較小的值。當移除負載轉矩時,電機的轉速又會短暫的上升并很快回到參考值,同時觀測器的估計誤差也會變得更小。在這一過程中,觀測器的誤差始終很小,在轉矩變化時,觀測器能始終穩定跟隨實際的電角度。
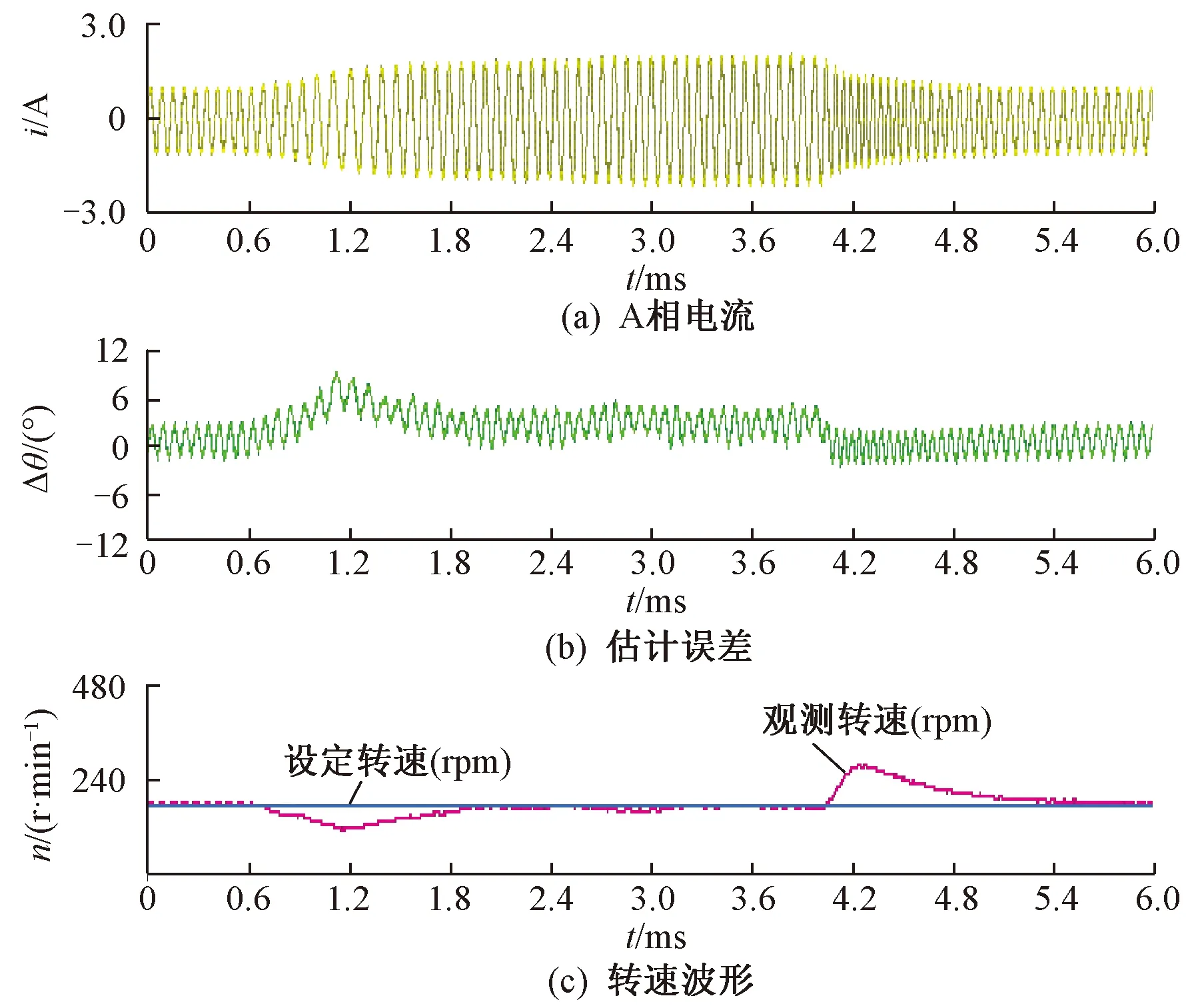
圖9 轉矩變化下的波形速度以及角度估計誤差的波形
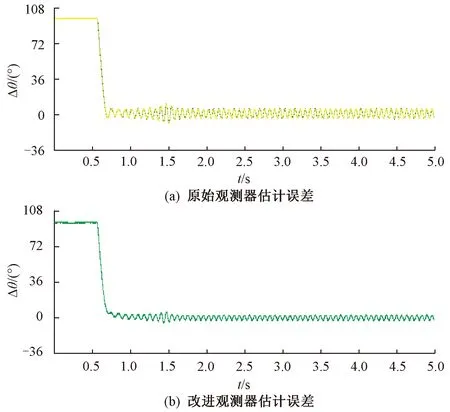
圖10 原始觀測器和改進觀測器輸出電角度的估計誤差
4 結 語
本文提出了基于等效磁鏈改進的Ortega觀測器,并基于此非線性觀測器所觀測到的轉子位置信息,建立了IPMSM的無位置傳感器控制系統,利用MATLAB/Simulink對該觀測器進行了仿真驗證,對各種工況下的無位置傳感器控制系統進行了相應的分析,最后利用基于TMS320F28335芯片搭建的實驗平臺,測試了各種工況下實驗樣機的運行情況,驗證了改進Ortega觀測器的有效性和可行性。
