諧波電網下并網逆變器多次采樣的改進功率控制
2021-06-19 09:35:18王維慶邱瑞東白云長
可再生能源 2021年6期
關鍵詞:控制策略
董 寧,何 山,2,王維慶,2,袁 至,2,邱瑞東,白云長
(1.新疆大學 電氣工程學院,新疆 烏魯木齊830049;2.可再生能源發電與并網控制教育部工程研究中心,新疆 烏魯木齊 830049)
0 引言
近年,我國風電技術取得巨大進步[1]~[4]。并網逆變器作為可再生能源發電、大規模儲能系統的并網接口,在并網發電過程中具有重要作用,是提高風電系統電能質量及可靠性的關鍵設備[5]~[7]。
電網系統中的5,7次諧波電壓含量最高,危害也最大[8]。網側逆變器矢量控制受諧波電壓影響,致使并網電流混入低次諧波[9],有功、無功功率產生倍頻波動,從而可能導致直流母線電壓失去平衡,破壞系統穩定性,降低系統輸出電能質量[10],[11]。文獻[12]提出一種抑制并網低次諧波電流分量的交叉耦合控制策略,可有效降低諧波電流含量,但不能有效抑制功率波動。文獻[13],[14]針對5,7次諧波電壓情況,采用多次采樣下電流正、負序分離的矢量控制方法抑制并網電流畸變,取得了較好的抑制效果,提高了系統穩定裕度,但方法復雜,且未考慮有功、無功功率波動。針對并網電流正弦性與抑制功率波動不能兼顧的問題,文獻[15]在靜止坐標系下,提出了利用瞬時功率直接計算電流參考指令的控制策略,采用加權思想實現并網逆變器電流/功率質量的協同控制,提高了系統運行性能,但需要復雜的計算過程與公式推導。文獻[16],[17]提出直接功率控制策略(Direct Power Control,DPC),由功率控制環代替電流控制環,降低了系統算法的復雜程度,以直接控制所產生的瞬時功率來消除諧波對功率的擾動,平抑由諧波引起的功率波動,從而穩定直流側母線電壓。在理想電網運行條件下,具有良好的輸出特性,但在諧波電網下,并網電流、功率均會存在倍頻波動。
針對以上問題,本文提出在5,7次諧波電網電壓下,將多次采樣策略直接應用到功率加前饋諧波補償器中,改進的功率控制策略可以根據實際并網工況需求的不同,進行電流和功率控制目標的選擇,達到系統的運行要求。此外,多次采樣策略的應用,可改善諧振控制器在兩種控制目標下的諧波抑制效果,獲得更好的輸出電能質量。
1 并網逆變器數學模型
并網逆變器主電路拓撲結構如圖1所示。圖中:ugn(n=a,b,c)為電網三相電壓;R,L為并網進線電阻、電感;ign為逆變器輸出的三相并網電流;usn為逆變器側三相電壓;Udc為直流側母線電壓。

圖1 并網逆變器結構圖Fig.1 Structure diagram of grid connected inverter
由圖1可知,在基頻dq旋轉坐標系下,采用電網電壓d軸定向控制,即ugq=0,可得直接功率控制方式下電壓源逆變器(Voltage Source Inverter,VSI)的電壓方程為[10]
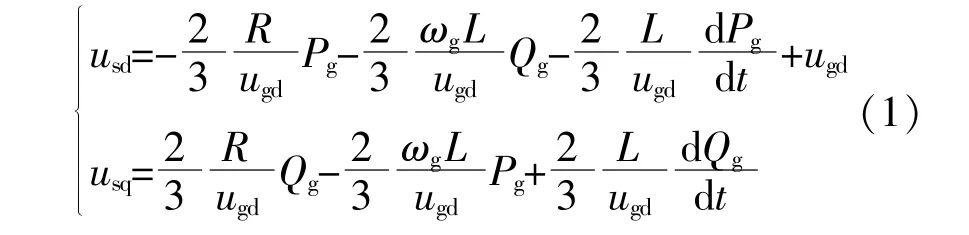
式中:ugd,ugq為dq坐標系下電網電壓;igd,igq為dq坐標系下并網逆變器輸出電流;usd,usq為dq坐標系下逆變器側電壓;ωg為電網電壓角頻率;Pg為并網逆變器輸出的有功功率;Qg為并網逆變器輸出的無功功率。
在電網系統中,電網電壓除基頻分量,還含有較高的5倍頻負序分量與7倍頻正序分量,7次以上諧波含量相對較小,可以忽略。此時,并網電流主要含有5,7次諧波成分,并網逆變器輸出有功、無功功率表現為6倍頻波動。傳統控制策略須要分離電網電壓、電流中的諧波分量,用于計算相應的功率補償,增加了控制系統的復雜性與難度。
2 增加前饋諧波補償器的改進DPC策略
2.1 并網逆變器改進DPC策略
本文提出了諧波電網下并網逆變器的改進DPC策略,該策略由功率控制環代替了電流控制環,無須對電壓、電流進行正、負序分離,降低了控制算法的難度,提高了并網功率和直流側母線電壓穩定性。在此基礎上,添加了前饋諧波補償器,其采用矢量比例積分(Vector Proportional Integrator,VPI)諧振調節器來抑制諧波電流或功率波動,分別通過選取igd,igq和Pg,-Qg作為輸入的反饋信號,設定補償環節中的給定值為0,將反饋量與給定值進行比較,得到差值后,由諧振控制器對其進行調節,便可得到不同控制目標下的補償值,將補償值輸入到電壓控制量中,從而調節系統PWM脈沖波,實現并網逆變器在DPC下的兩個獨立控制目標,其控制框圖如圖2所示。圖中:Pg*,Qg*為有功、無功功率參考值;PLL為鎖相環,用于跟蹤電網基波頻率與相位;θg為電網電壓矢量位置角度;usabc為PWM模塊控制信號。
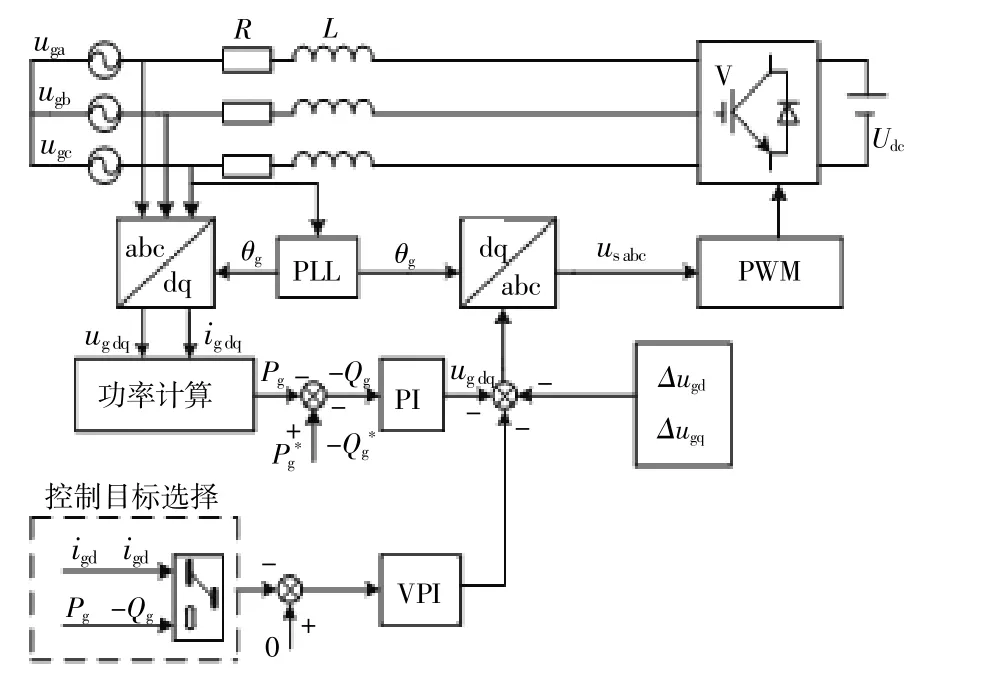
圖2 諧波電網下改進功率控制框圖Fig.2 Improved power control block diagram under harmonic grid conditions
電壓補償項Δugd,Δugq分別為
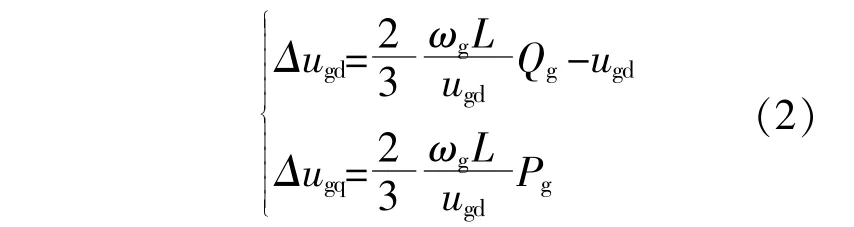
通過控制目標選擇模塊得到反饋信號,輸送給VPI前饋諧振控制器,選擇igd,igq作為輸入信號時,逆變器將輸出三相正弦的并網電流;選擇Pg,-Qg作為輸入信號時,逆變器將輸出平穩的有功、無功功率,從而實現兩個目標獨立控制。
2.2 前饋諧波補償器
VPI諧振控制器可以通過設定諧振頻率,使其在指定頻率處呈現高增益,其它頻率處幅值迅速衰減,無明顯調節作用,適用于抑制固定振蕩頻率的波動分量,其傳遞函數為

式中:ωc為諧振頻率處帶寬,取值5~15 rad/s,本文取ωc=10 rad/s;Kp,Ki分別為比例、積分系數,可以調節控制器帶寬,可以影響控制器的增益、帶寬;5,7次諧波經過Park變換,在dq坐標系下轉變為6次諧波,因此并網電流及有功、無功功率均表現為6倍頻波動,選取k=6;ωg=100πrad/s。根據文獻[8]中VPI參數設計方法,求得Kp=1.38,Ki=34.5,通過諧振控制器來抑制兩種控制目標下的諧波分量。
改進功率控制策略結合空間矢量調制PWM脈沖波控制功率開關管的開通與關斷。作為并網逆變器控制方法,具有結構簡單、響應性能好的優點,但PWM在基于數字控制過程中的延時,對諧振控制器影響較大,導致其實際諧振頻率偏離理論設定頻率,致使兩種控制目標下的諧波抑制效果較差。因此,延時問題不能忽視。
3基于多次采樣的PWM調制
3.1 多次采樣控制原理
在不改變開關頻率fs的前提下,多次采樣控制通過改變采樣頻率fc,實現一個開關周期內多次采樣,同時更新調制信號,即fc=Mfs(M為采樣系數)。M≥2為多次采樣,M=2為一種特殊情況,兩次采樣,即兩次裝載。PWM調制原理如圖3所示。
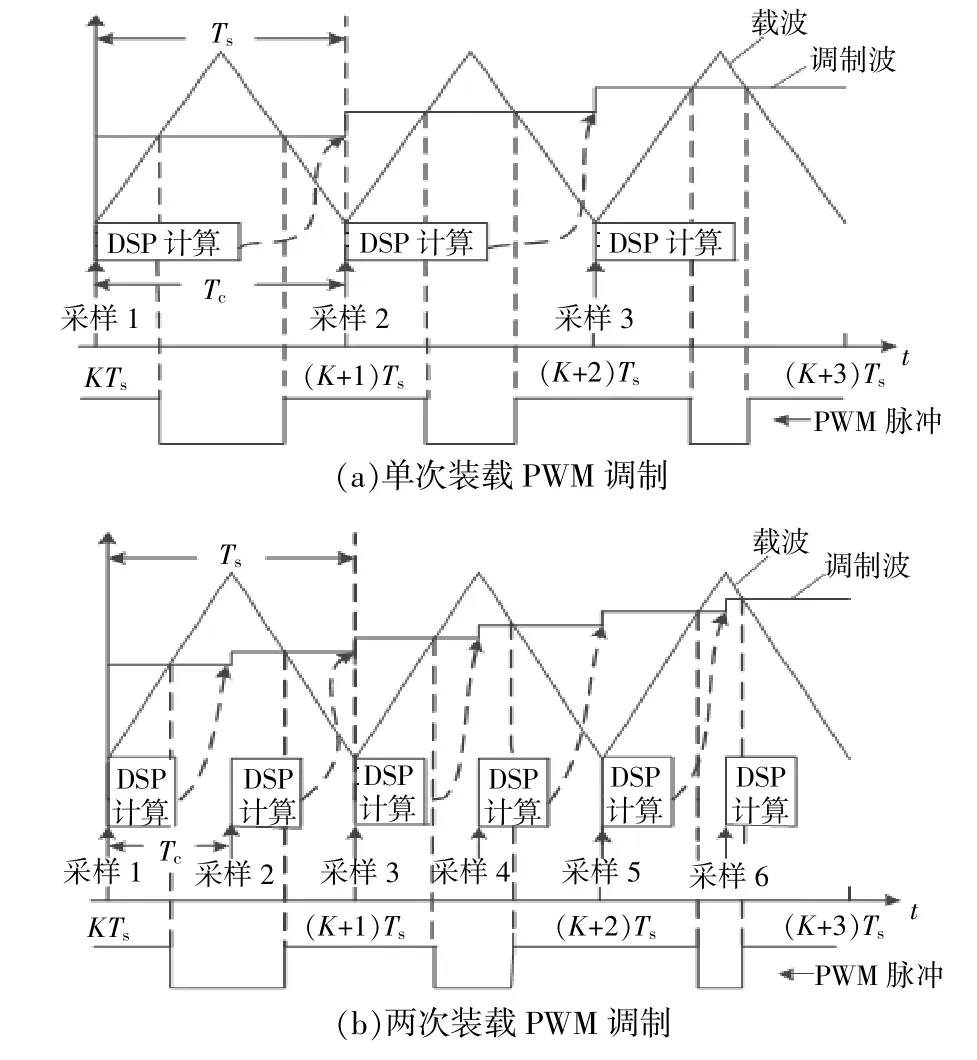
圖3單次和兩次裝載PWM調制Fig.3 Diagram of single-update and double-update PWM
圖中:Ts為開關周期;Tc為采樣周期。
DSP數字控制過程中PWM延時包括更新延時Tc/2和一拍滯后延時Tc。單次裝載時Tc=Ts,總延時時間為Tc/2+Tc=3 Tc/2=3 Ts/2;兩次裝載時Tc=Ts/2。因此,總延時時間為3 Ts/4。與單次裝載相比,控制延時有所減小;當M次裝載時,總延時時間Td=3Ts/(2M);可見,增加裝載次數可進一步減小延時,當M→∞時,即可視為模擬控制中的自然采樣。
3.2 采樣次數M對諧振調節器控制精度的影響
為分析M對諧振調節器性能的影響,分別繪制單次裝載(Tc=Ts),2次裝載(Tc=Ts/2)與8次裝載(Tc=Ts/8)時bode圖,如圖4所示。
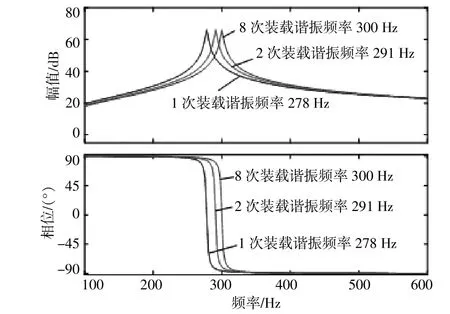
圖4 諧振調節器在不同裝載次數下的bode圖Fig.4 Bode diagram of resonance regulator under different loading times
設定諧振頻率為300 Hz,由圖4可見,3種裝載情況下的實際諧振頻率有所不同。其中,單次裝載時偏離理論設定頻率較大,為278 Hz,因此對6倍頻波動的電流分量或功率分量控制性能較差;2次裝載時實際諧振頻率與單次裝載相比有所減小,為291Hz;當8次裝載時,實際諧振頻率達到理論設定頻率300 Hz。可見,采樣系數M越大,諧振控制器對諧波電流或功率的控制精度越高。
4 基于DPC策略的并網逆變器仿真及分析
4.1 仿真參數選取
在Simulink中搭建7 kW并網逆變器系統模型,對不同控制策略情況下的仿真結果進行對比,仿真參數選取如表1所示。

表1 仿真參數Table 1 Simulation parameters
4.2 傳統DPC策略
并網逆變器采用傳統直接功率控制策略仿真,在0.5 ~0.6 s向電網電壓分別注入10%的負序5次諧波和正序7次諧波,對電流做FFT分析,仿真結果如圖5所示。
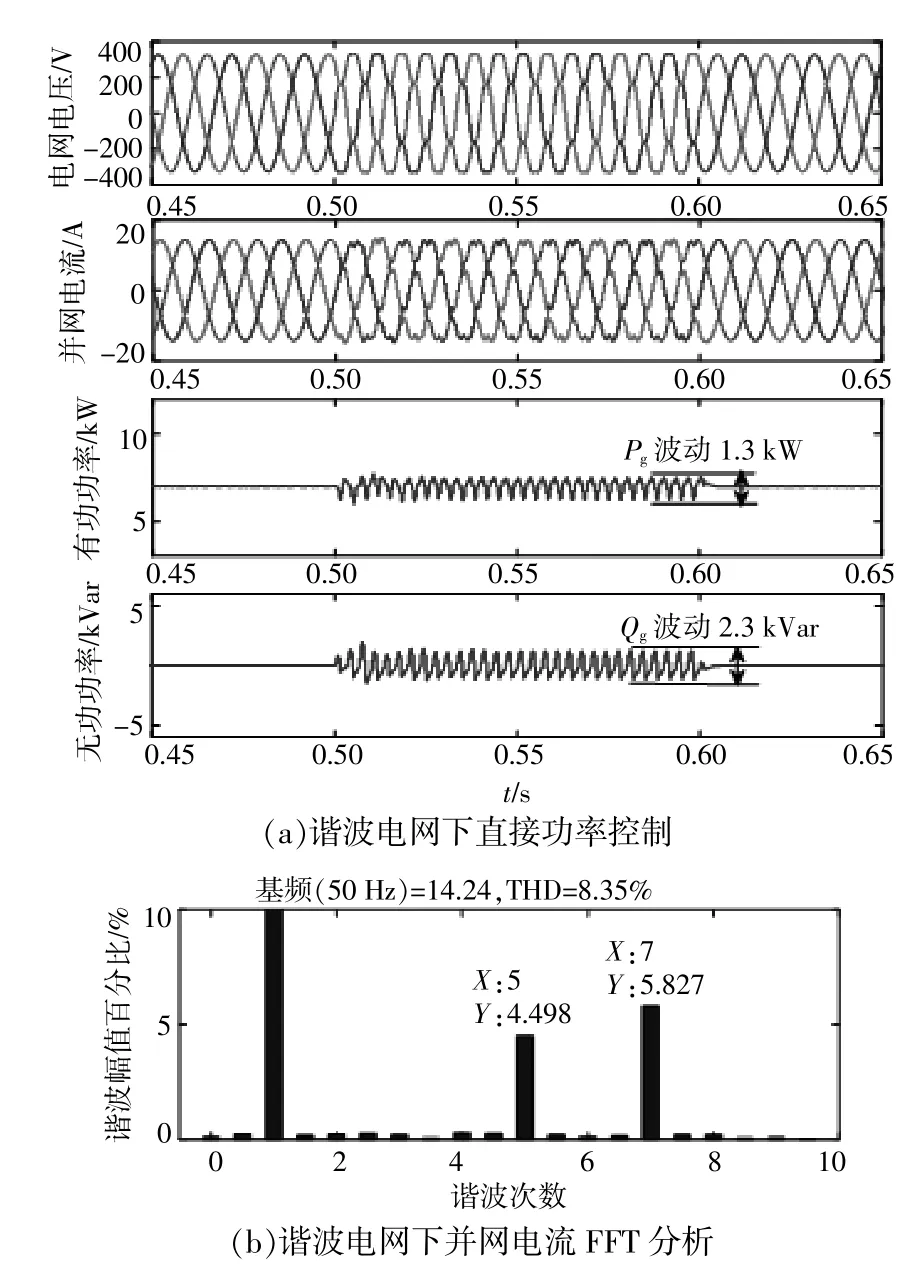
圖5 理想和諧波電網情況下直接功率控制仿真圖Fig.5 Simulation diagram of direct power control in ideal and harmonic grid conditions
由圖5可知,并網電流波形發生畸變,有功功率、無功功率產生大幅度波動,并網電流的5,7次諧波含量較高,不能滿足《電能質量·公用電網諧波》標準名稱中奇次諧波低于4%的要求。
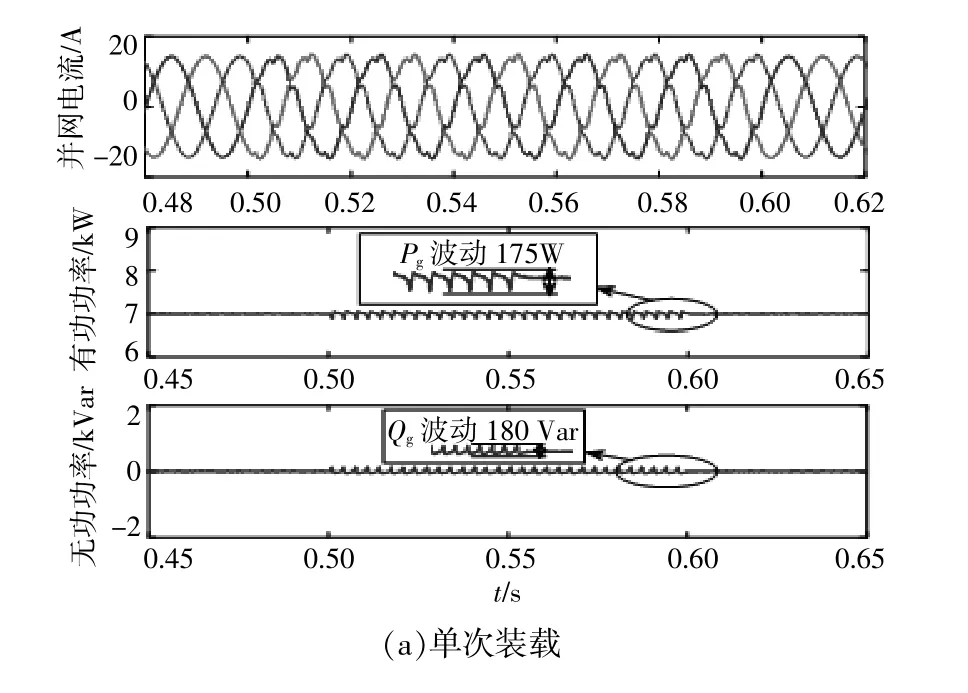
4.3 并網電流正弦目標下的改進DPC策略
為抑制并網電流畸變,降低其中含量較高的5,7次諧波,選取igd,igq作為前饋諧振控制器輸入信號。由于8次裝載時,實際諧振頻率達到了理論設定頻率300 Hz,因此,本文采用8次裝載進行仿真,以降低DSP延時對諧振調節器對控制精度的影響,仿真結果如圖6所示。
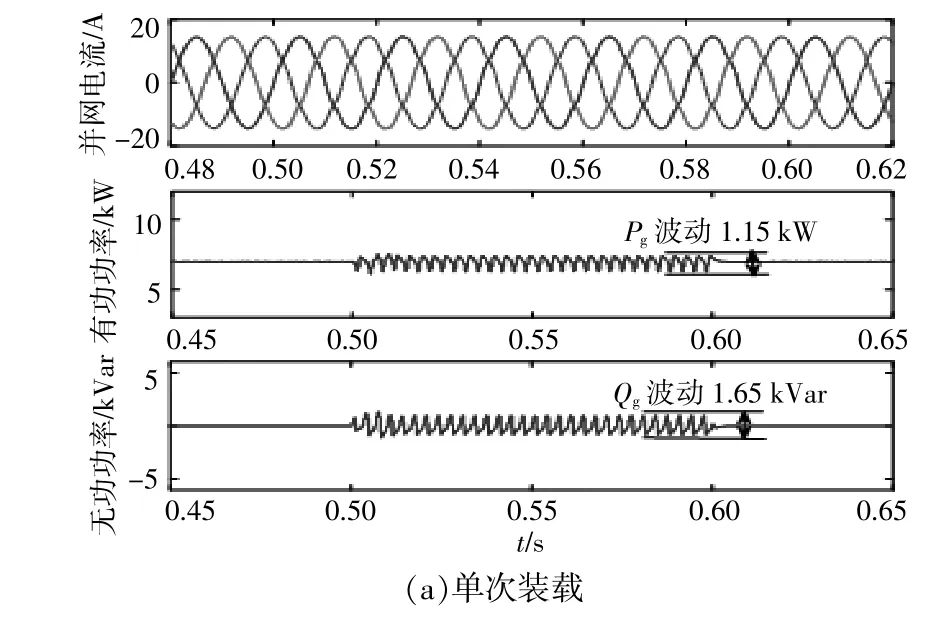
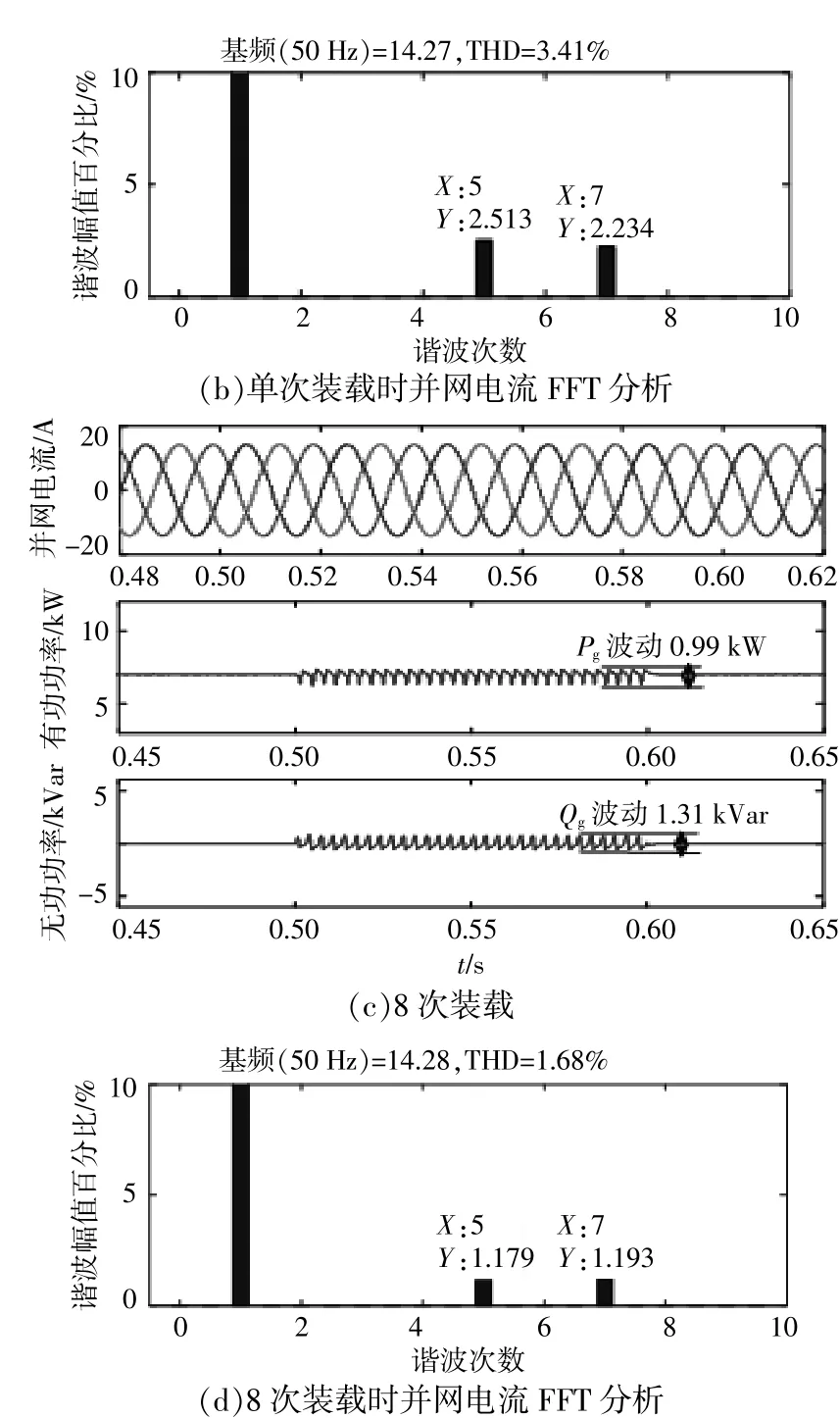
圖6 并網電流正弦目標下不同裝載次數仿真圖Fig.6 Simulation diagram of different loading times under sinusoidal targetof grid connected current
由圖6可知,5,7次諧波電流含量進一步降低,并網電流正弦性更好,多次采樣策略可獲得更好的諧波抑制效果,但有功功率、無功功率仍存在大幅度波動。
4.4 系統輸出功率平穩目標下的改進DPC策略
選取Pg,-Qg為前饋諧振控制器輸入信號,對其單次及8次裝載時進行對比,如圖7所示。
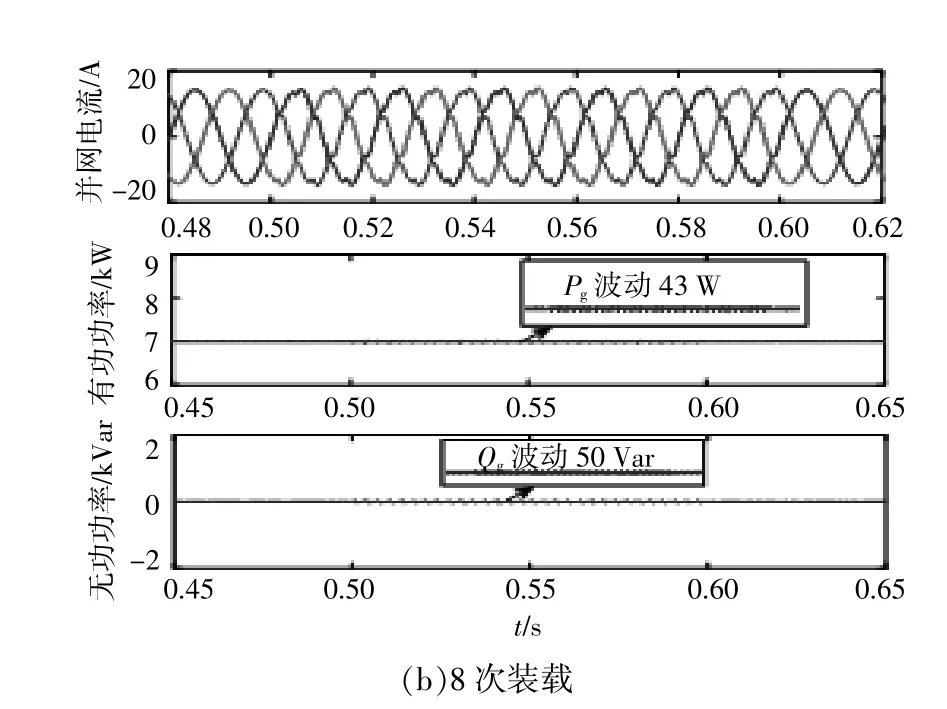
圖7 功率平穩目標下不同裝載次數仿真圖Fig.7 Simulation diagram of different loading times for power stationary target
由圖7可知:在兩種裝載次數情況下,并網電流波形仍存在嚴重畸變,無明顯諧波電流抑制作用。根據有功功率、無功功率輸出波形可見,單次裝載時可以取得較好的諧波功率抑制效果,但仍存在小幅度波動,8次裝載時有功及無功功率更加穩定,基本無波動。
4.5 仿真結果分析
改進功率策略下,不同控制目標及不同裝載次數的仿真結果如表2所示。

表2 仿真數據結果Table 2 Simulation data results
由表2可知,①諧波電網電壓情況下,采用傳統直接功率控制策略,并網電流含有較高的5,7次諧波成分,其中5次諧波占4.498%,7次諧波占5.827%;并網功率呈6倍頻波動,ΔPg達1 300 W,ΔQg達2 300 Var;惡化了系統電能質量,破壞系統穩定性。②引入前饋諧波補償器的改進策略后,兩種控制目標下均可取得較好的諧波抑制效果,在并網電流正弦性目標下,5次諧波為2.513%,7次諧波為2.234 %,諧波電流含量下降明顯;在功率平穩目標下,ΔPg降至175W,ΔQg降至180 Var;但并網電流及有功、無功功率仍存在較少量的諧波成分。③為解決DSP數學控制過程中的延時致使單次裝載時諧振控制器實際諧振頻率與理論設定頻率300Hz偏離較大的問題,本文采用8次裝載PWM調制。由結果數據對比可知,8次裝載時的諧波抑制效果優于單次裝載。其中,并網電流正弦性目標下,5,7次諧波電流含量分別由2.513 %,2.234 %降至1.179 %,1.193 %。功率平穩目標下,有功及無功功率波動由175W,180 Var降至43W,50 Var,保證了電能質量。
5 結束語
針對5,7次諧波電網電壓下,并網電流畸變,有功功率、無功功率波動問題,本文采用多次采樣的改進功率并網逆變器控制策略,對兩種控制目標下的諧波分量進行抑制,得出以下結論。
①直接功率加前饋諧波補償器的控制策略簡單,避免了多目標協同控制方法中復雜的計算過程。可根據實際要求進行igd,igq或Pg,-Qg反饋信號的選擇,通過前饋諧波補償器來抑制電流或功率信號中的諧波分量,實現并網電流正弦或輸出功率穩定的控制目的。
②在改進功率控制基礎上引入多次采樣策略,采用8次裝載PWM調制,使諧振控制器實際諧振頻率與理論設定頻率300Hz相吻合,可提高控制精度,降低了控制策略的延時行,兩種控制目標都取得更好的諧波抑制效果。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36